具有集成的旋转清洗干燥的硅基板的自动化里外干燥双侧抛光及计量的制作方法
具有集成的旋转清洗干燥的硅基板的自动化里外干燥双侧抛光及计量
1.背景
2.领域
3.本公开内容的实施方式一般涉及用于半导体器件制造的方法及装置。特定而言,本文的实施方式涉及用于检验抛光系统中基板的材料去除的方法及装置。
4.相关技术的描述
5.化学机械抛光(chemical mechanical polishing;cmp)常用于制造高密度集成电路以平坦化或抛光沉积于基板上的材料层。cmp系统通常包括第一部分(例如特征为一个或多个抛光站的基板抛光部分)及第二部分(特征为诸如旋转清洗干燥(spin rinse dry;srd)站及cmp前或后计量站的后cmp清洁)。常将第二部分与第一部分集成,形成单一抛光系统。第二部分通常包括基板搬运器,其用于在第一及第二部分之间及第二部分中的个别系统或站之间传送基板。
6.在抛光工艺中,可按水平或垂直定向设置基板,在存在抛光流体(例如浆料)的情况下使器件侧表面靠向抛光垫。首先抛光基板,且随后将其移动,使其在清洁器中得到清洁。
7.未来电力电子器件及电动车(electric vehicle;ev)中将使用碳化硅(sic)基板。由于具有独特的材料性质(例如硬度及透明度),sic基板需要特殊的改良工艺。sic基板经过化学机械抛光(cmp)工具上的抛光循环,以去除材料并平坦化基板。根据配方由cmp工具执行基板上的材料去除。由于基板的sic材料极硬,因此抛光工艺涉及基于高氧化剂的浆料以支持材料去除。然而,sic去除工艺仍极慢。另外,sic基板也为透明的,因此使得持续检验材料去除以与配方比较极具挑战性,并难以获得所要的材料厚度。
8.因此,本技术需要促进sic基板的材料去除的基板处理系统。
9.概述
10.本文公开用于抛光基板的方法及装置。更具体而言,装置涉及用于抛光基板的集成式cmp系统。cmp系统具有经配置以抛光基板的抛光站。旋转清洗干燥(srd)站经配置以清洁且干燥基板。计量站经配置以测量基板的参数。机器人经配置以将基板移动至srd站中及自srf站移出基板。受动器清洗干燥(effector rinse and dry;eerd)站经配置以清洁且干燥机器人的终端受动器,且湿槽经配置以在清洁或抛光时使基板湿润。
11.在另一实施方式中,提供抛光基板的方法。方法开始于将基板移动至抛光单元中的头部清洁装载卸除站。随后在抛光单元中抛光基板。用机器人的终端受动器将抛光的基板移动至旋转清洗干燥(srd)站以清洁基板。当由srd站清洁基板时,在终端受动器清洗干燥(eerd)站中清洁机器人的终端受动器。随后用机器人的清洁终端受动器将由srd站清洁的基板移动至计量站。
12.附图简要说明
13.为了详细地理解本公开内容的上述特征的方式,可参考实施方式更特定地描述本实施方式(上文简要概述),其中一些实施方式在附图中图示。然而,应注意,附图仅图示例
示性实施方式,并且因此不应认为其限制本公开内容的范围,可承认其他等效的实施方式。
14.图1为例示性化学机械抛光(cmp)处理系统的示意平面图。
15.图2图标图1的cmp系统的终端受动器清洗干燥(eerd)站。
16.图3图标图1的cmp系统的计量站。
17.图4a图标图1的cmp系统的旋转清洗干燥(srd)站。
18.图4b图示图4a的旋转清洗干燥(srd)站的旋转夹持器。
19.图5为抛光图1的cmp系统中的基板的方法的流程图。
20.为便于理解,在可能的情况下以使用相同的附图标记来标明图中共同的相同要素。设想一个实施方式的要素及特征可在无进一步叙述的情况下有益地包括于其他实施方式中。
21.具体描述
22.在本文描述的实施方式中,提供化学机械抛光(cmp)处理系统。cmp系统用于制造高密度集成电路以平坦化或抛光沉积于基板上的材料层。cmp系统实现碳化硅(sic)或其他基板的“里外干燥”双侧抛光。cmp系统具有抛光器、湿盒槽、干盒槽、集成式旋转清洗干燥(srd)站、终端受动器清洗干燥站(eerd)及具有光学字符识别的计量站。计量站包括实时计量及穿过光学字符识别(optical character recognition;ocr)站的基板识别。为进行高效且高处理量的基板抛光,cmp系统为高度自动化的。
23.在一个实例中,将引入的sic基板放置于输入盒中,随后将其浸没于水浴中以清洗基板且自基板表面去除松弛的污染物。将清洗后的基板发送至srd,并随后发送至计量站以预检查计量参数,或在不进行预检查的情况下馈入至抛光站(取决于所需材料去除的基线准确度)。
24.在研磨sic基板之后,在cmp系统上使用双侧抛光工艺抛光基板。由于sic材料极硬,因此使用基于强氧化剂的浆料自基板去除材料。即使在使用强氧化剂的情况下,自sic基板去除材料也可为极慢的工艺。由于sic基板为透明的,因此使用本文描述的新自动化技术持续检验材料去除的量,与使用特定cmp配方所预期的目标去除量相比较。cmp系统清洁基板以去除浆料颗粒,且使用计量站的计量设备以高准确度检查基板的重量。计量设备还有照相机,其准确测量基板的表面积。利用测量的表面积,cmp系统可准确且自动确定材料去除。
25.cmp系统有机器人,具有经配置以在cmp系统中传输基板的终端受动器。将eerd站集成于cmp系统上,清洁机器人终端受动器(叶片),使终端受动器能够传送湿(且污染)及干(且清洁)的基板。终端受动器的清洁允许将基板无缝传送至srd站及自srd站传送,不需要两个独立的机器人,避免交叉污染。
26.srd站执行湿清洁,且随后将基板上残余的浆料沉积物干燥。srd站经设计以搬运大多数种类的基板。在srd站中清洁基板之后,通过现经清洁的机器人终端受动器将基板移动至计量站,以由轨道机器人测量重量及表面积。
27.通过基板识别(id)自动存储抛光后去除的所测量材料量及基板id。在无任何人工介入的情况下,可在操作中读取基板id及基板计量信息。由机器人将基板装载/卸除至读取基板id的基板id读取器站或自其装载/卸除。基板id读取器站中的照相机扫描基板表面的基板id,不需要使用平面/凹口定向器使平面/凹口保持于任何特定的定向以使得能够读取
基板id。
28.计量单元具有视觉系统,其具有用于基板id读取的照明。将计量单元与抛光系统集成,以测量重量、表面积且读取基板id。通过比较基板的初始及最终厚度,可准确测量自基板去除的材料量。在一个实例中,可使用公式厚度=质量/(表面积x密度)来确定厚度(基板之间具有相当大的公差)。大体而言将密度视为基板的常数。可在之前经由其他技术测量、计算或得知或确定密度,或可自cmp系统的存储器或其他源获取密度。可通过高精度称重秤准确测量质量,而由图像处理(即照相机)计算表面积。由此,使用抛光之前及之后的密度、表面积及重量,可计算厚度的变化,从中可准确确定自基板去除的材料量。
29.由于照相机可检测基板id,因此经由基板的检测基板id,诸如计量结果(包括基板上的微裂)、厚度及材料损失确定的信息可与特定基板电性相关(例如存储于存储器中)。可使用所述信息以及与其他基板相关的信息进行进一步评估及配方调整。为改良照相机的功能及准确度,将照明单元唯一地安置于基板下方,同时将照相机安装于基板上方。照明单元相对于照相机的相对位置提供基板的背光,从而改良对比度及基板id的读取。可选择并校准基板照明与照相机机之间的间距,以改良基板id的准确读取。
30.由此,cmp系统可在无人工介入的情况下用高度自动化的方式执行上文提及的所有功能。此cmp系统还能够搬运大多数类型的基板(具有平面特征/凹口特征/不同尺寸)。设定照相机,使得其能够以一方向扫描整个基板并且在一秒内检测参数。在无任何人工介入的情况下,可在操作中(即在计量站中的同时)读取基板id及基板计量说明。
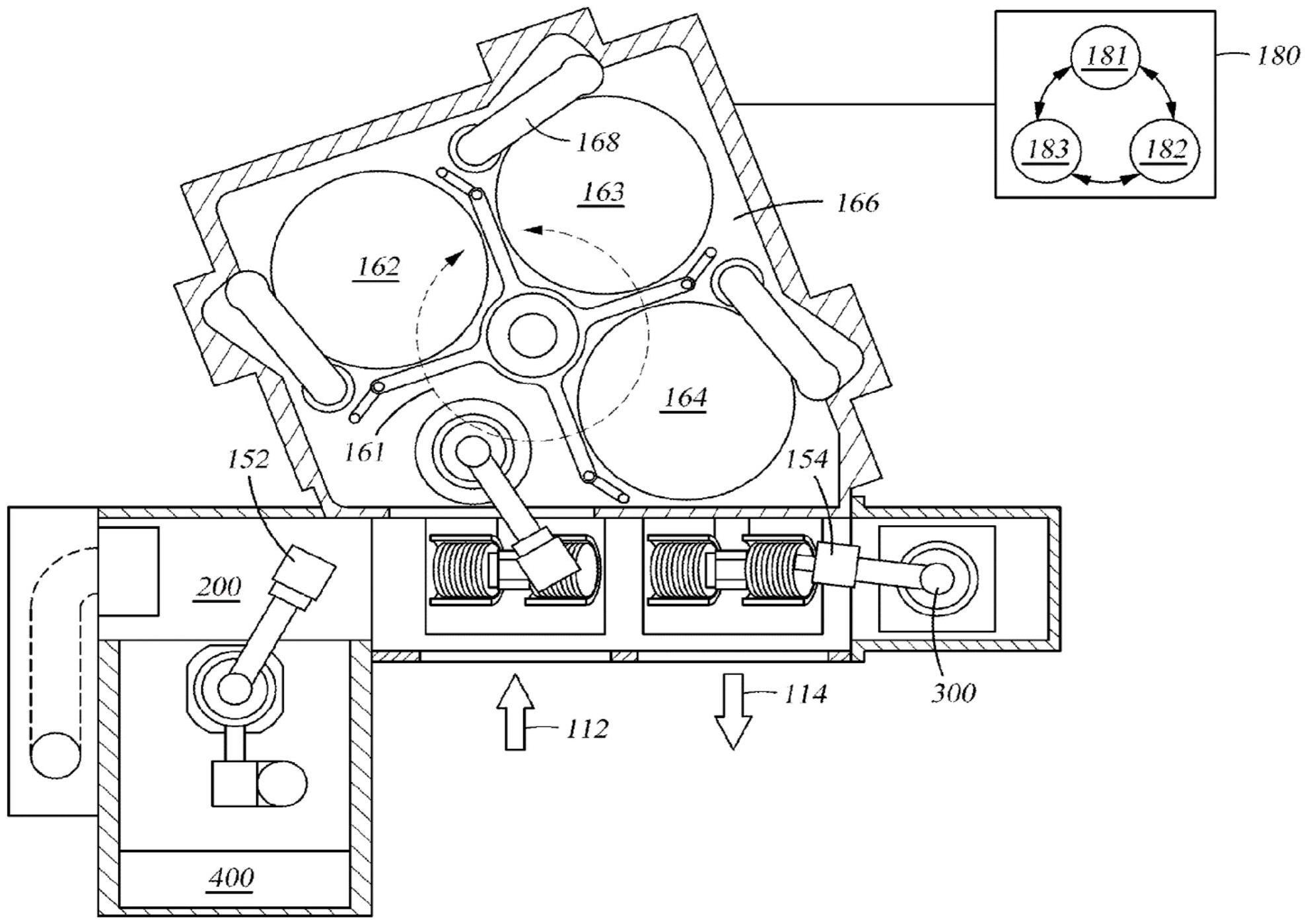
31.现将参考图1讨论此cmp系统。图1为例示性化学机械抛光(cmp)处理系统100的示意平面图。cmp系统100包括用于处理基板120的多个集成式站。cmp系统100包括抛光站116、湿槽盒站112、干槽盒站114、旋转清洗干燥(srd)站400、计量站300、受动器清洗干燥(eerd)站200、及用于使基板在cmp系统100中移动的多个机器人152、154、156。
32.湿槽盒站112经配置以自cmp系统100之外接收一盒或多盒的基板120。湿槽盒站112具有清洁水或其他流体,在抛光之前将基板120至少部分浸没于其中。湿槽盒站112具有流体输入及输出,即排水管。湿槽盒站112可视情况具有边冲边下(wash-down)系统,其中将水喷或浇在基板上方,且自湿槽盒站112排出水。以此方式,湿槽盒站112中的基板保持为湿的,基本上防止污染物或其他颗粒干燥基板120且附着于基板120。
33.多个机器人中的第一机器人152将基板120在湿槽盒站112、srd站400及抛光站116之间移动。
34.抛光站116具有经配置以抛光基板120的多个抛光站(162、163、164)。每一抛光站(162、163、164)具有抛光垫166及抛光臂168。每一抛光站(162、163、164)另外具有一个或多个阀门,其用于将诸如浆料或其他合适材料的抛光流体引入至抛光垫166上。抛光臂168具有经配置以在抛光期间固持基板120的抛光头。抛光头部分将基板120安置于抛光垫166上方,且使基板120靠向抛光垫166并与抛光流体接触。根据配方自抛光站116中的基板120去除材料,配方大体而言存储计算机可读指令中。基板120可具有需要使用cmp配方抛光或去除的硬材料层,例如sic材料层。当自抛光站中的基板120去除sic材料时,将基于高氧化剂的浆料提供至抛光垫166以支持硬材料的去除。在一个实例中,可将每一抛光站(162、163、164)配置有更细粒浆料或不同类型的抛光垫166,以根据配方自基板120顺序地去除材料层。
35.第一机器人152将基板120移动至缓冲站,以传送至srd站400。图4a图示srd站400。在半导体湿处理应用(例如使用cmp系统100的应用)中,旋转基板120以清洁且干燥基板,以减小损坏及污染的可能性。举例而言,在srd站400中去除残余的浆料,其可能在基板120的表面上干燥且形成缺陷。另外,通过自srd站400中的基板去除浆料及流体,可确定基板120的准确重量,从而使得能够准确确定自基板移去除的材料量。
36.srd站400具有主体430。主体430为顶表面432、底表面434及侧面433。顶表面432、底表面434及侧面433封闭主体430的内处理区域420。将旋转夹持器420设置于主体430的内处理区域420中。图4b图示旋转夹持器420。srd站400中的旋转夹持器420经配置以按垂直定向安置基板120。然而应了解旋转夹持器420可替代地经配置以按水平的或其他定向安置基板120。
37.穿过主体430设置流体喷洒器462及排水管464,且流体地耦接至内处理区域。可将流体喷洒器462设置为穿过主体430的侧面433、底表面434或顶表面432。流体喷洒器462经配置以将诸如清洁水的流体流引导至由旋转夹持器420支撑的基板120。将排水管464安置为穿过侧面433或底表面424,且其自内处理区域420排出由流体喷洒器462提供的流体。排水管464可耦接至泵或使用重力自内处理区域420去除流体。可将槽454安置于顶表面432或侧面433中。可调整槽454的大小,以允许将安置于机器人152的终端受动器上的基板120移至内处理区域420中且移出内处理区域420。在一个实施方式中,将槽454设置于顶表面432中,且调整其大小以允许在旋转夹持器420与机器人152的终端受动器之间传送基板120。
38.旋转夹持器420具有保持表面422及背侧表面424。保持表面422具有多个指状物470。背侧表面424具有多个致动器471。每一致动器471耦接至指状物470中的各别者,且经配置以移动指状物470中的各别者。当致动至第一位置时,指状物470将基板120固定至旋转夹持器420的保持表面422。当致动至第二位置时,指状物470自旋转夹持器420的保持表面422释放基板120。
39.如上所述,在由旋转夹持器420旋转之前,由多个指状物470夹持基板120。当旋转夹持器420旋转基板时,由指状物470夹持基板120足以将基板120固定至旋转夹持器420。在一个实例中,旋转夹持器420的指状物470对基板120施加约1lbf至约3lbf。在正常操作中,由致动器471推开指状物470。可对指状物470施加弹簧压力,以将指状物470保持于闭合位置,将基板固定至保持表面。随后由第一机器人152的终端受动器将基板120放置于自保持表面422延伸的多个支柱479之间,所述支柱479用作放置基板120的平台。由沿基板120周缘的支柱479限制所放置基板120的径向移动。支柱479还使基板120以旋转夹持器420为中心并在旋转夹持器420上对准,指状物470闭合至基板120上且保持基板120。当移除保持指状物470的致动器进行的机械致动时,弹簧将指状物470位移至闭合的位置,使基板120靠向外切的指状物470,由此使基板位于保持表面中心并在保持表面上对准。旋转夹持器420的设计使基板120位于中心,并保持基板120的任何对准状态。在另一实施方式中,旋转夹持器420使基板120对准至预定的位置,例如切割的位置(cut up position)。
40.使旋转夹持器420连接至电动机,该电动机在处理期间使旋转夹持器420及安装于其上的基板120旋转。当处理平面(或凹口)基板时,使用预对准站将基板120旋转至预定义的定向,从而防止基板的平面、切口或凹口位于其中指状物470无法夹持基板120的位置。多个指状物470对称地位于保持表面422上,而多个支柱479不对称地位于保持表面422上。选
择支柱479的间距以允许机器人的终端受动器进入。在一个实例中,安置指状物470使得任两个邻近指状物之间的间距大于基板平面的最大弦尺寸。这确保在最坏的情况下,基板平面可仅靠近一个指状物470,基板120可仍由所有剩余的其他指状物470夹持。可移除指状物470以有助于维护。
41.不对称的支柱479及基板平面缺失的基板质量可导致旋转夹持器420旋转时的不平衡(静态的及动态的)。为补偿此不平衡,在旋转夹持器420或转子附件中形成不对称孔499,在旋转基板120时提供夹持器420的转子平衡及最小摆动。不对称支柱479及对称指状物470可适应基板120中的不同边缘条件(斜角、锯齿状等),同时使基板120自以旋转夹持器420为中心的位置移动出少于1.5mm,即使基板120在旋转夹持器420上对准。旋转夹持器420可搬运多种基板厚度(例如300um至825um)以及高达约200℃的温度。
42.在一个实例中,旋转夹持器420保持且旋转基板,同时流体喷洒器462在基板120处喷洒清洁水,以自基板120的整个表面彻底去除浆料及其他颗粒。排水管464自srd站400的内处理区域420去除含有颗粒的流体,以防止来自内处理区域420中存在的流体的颗粒重新引入或污染基板120的表面。关闭流体喷洒器462,且允许基板120在旋转夹持器420上旋转,以通过离心力去除且干燥基板120的任何剩余流体。srd站400现在具有清洁且干燥的基板,且使基板准备好进行后续的处理操作。
43.如上文所讨论,由机器人在cmp系统的站之间传送基板。除了具有多个机器人或单一机器人上有多个机器人叶片的实施方式中,机器人叶片(即在传送期间保持基板120的终端受动器)搬运处理前的基板及处理后的基板。当srd站400清洁基板120且机器人叶片无基板时,在eerd中清洁无基板的机器人叶片,以防止诸如浆料颗粒的污染物引入至离开srd站400中的现清洁的基板上。图2图标图1的cmp系统的eerd站200。
44.eerd站200具有主体220。主体220具有顶部226、底部224及侧壁222。顶部226、底部224及侧壁222封闭主体220的内空间228。在顶部226中可形成开口232。或者,在侧壁222中的一者中可形成开口232。调整开口232的大小,以允许第一机器人152的终端受动器153到达并进入eerd站200的内空间228。
45.eerd站200具有多个清洗喷嘴216及气刀212。清洗喷嘴216分配去离子化水(de-ionized water;diw)或其他合适的流体化学物质,以有效地清洗第一机器人152的终端受动器153。在主体220的底部224中形成排水管218。底部224可向排水管218倾斜。在一个实例中,将排水管设置为与侧壁222中的一者邻近,以促进diw向排水管218排泄。或者,可在底部224中任何地方形成排水管218,其中底部224向排水管218倾斜。举例而言,可在底部224的中心形成排水管218,且底部可为碗形的,其中排水管218在碗的底部。
46.将气刀212安置为邻近开口232。气刀212使清洁的干空气(clean dry air;cda)或其他合适的气体(例如n2等)流动,以干燥通过开口232的清洗后终端受动器153。举例而言,当自eerd站200的内空间228移除终端受动器153时,气刀212自终端受动器153去除流体。
47.可在主体220的侧壁222中形成通气孔214。通气孔214高于排水管218上方。通气孔214隔开在底部224及排水管218上方,以基本上防止预期自主体220的内空间228去除的流体经由排水管218进入通气孔214。由通气孔214自内空间228去除经由气刀212进入内空间228的cda或其他合适的气体。在一个或多个实例中,主体220可具有多于一个通气孔214,以自气刀212的内空间有效去除气体。通气孔214可直接或经由泵连接至工厂排气装置。
48.在操作中,当清洗打开时,将机器人的终端受动器153预安置在eerd站之外。终端受动器153经由开口332延伸至内空间228中。当终端受动器153进入开口232时,由多个清洗喷嘴216清洗终端受动器153。在终端受动器153得到充分清洗之后,关闭清洗喷嘴216且打开气刀212。随后终端受动器153经由开口332自内空间228缩回,且在缩回时在两侧上干燥。机器人的终端受动器153现为干燥的且基本上无污染物,并准备好拾取清洁的干燥基板120。
49.eerd站200上,第一机器人152的终端受动器153得到清洗及干燥,且准备好拾取干的清洁基板120。当基板120为湿润时,湿的终端受动器153搬运基板。当终端受动器153需要搬运干的清洁基板120时,终端受动器在搬运清洁的干基板120之前得到清洗及干燥。由此,仅需要一个机器人(例如第一机器人152)在不污染清洁后基板的情况下使清洁后及未清洁的基板120移动入及移动出srd站400。
50.第一机器人152将基板120移动至计量站300进行测量以确定自基板120去除的材料量。经由自基板120去除的材料量,可确定需要另外处理基板120。
51.使用计量站300在抛光之前/之后测量设置于基板120上的材料层的厚度,以在抛光之后检查基板120以确定是否已自基板表面清洁材料层,和/或在抛光之前/之后检查基板表面是否有缺陷。在一些实例中,基于使用计量站300获取的测量或表面检查结果,基板120可回到抛光垫166进行进一步抛光,和/或引导至不同的基板处理站或站,例如干槽盒站114。图3图标图1的cmp系统100的计量站300。
52.计量站300具有基板保持器326、支撑框架332、用于称重基板的称重秤340及照相机360。称重秤340设置于隔振器324上。隔振器324耦接至支撑框架322。隔振器324包括诸如塑料及弹性体的能量传送衰减材料,其减少经由隔离器324传送的能量的量。由此,隔振器324经由隔振器324使外部环境干扰衰减,例如来自支撑框架322与称重秤340之间行进的振动,其可能影响称重秤320的性能及准确度。在一个实例中,称重秤320的准确度适于测量基板120的重量,误差小于正或负0.0001克。
53.可操作照相机360以扫描基板120的表面。使用由照相机360获取的一个或多个图像测量基板120的基板区域,且检测基板120的基板id。计量站300经配置以搬运来自图像360的常规或镜像的图像。计量站300包括照明系统350及屏蔽物370。将屏蔽物370绕照相机360、支撑框架322及照明系统350设置。将照明系统350设置于称重秤340与基板120之间。照明系统350经配置以照亮基板120,以使照相机360能够更容易且更准确地测量基板参数,例如表面积及基板id。通过照明系统350对基板120的照亮有助于提高基板120的基板扫描的准确度。屏蔽物370防止环境光干扰照相机360。为减少基板保持器326干扰照明系统350,基板保持器326具有少量指状物,例如三个指状物,其用于接收由机器人传送的基板120。基板保持器326的指状物的宽间距允许基板下方的照明系统350提供更好的对比度,以使用安装于基板120上方的照相机360检测基板id。
54.使用通过称重秤340及照相机360获取的信息确定如上所述自基板120去除的材料量。基板120的表面积及重量变化(即抛光前与抛光后重量之间的变化)已知的情况下,可准确确定通过抛光工艺去除的材料量。使用公式(初始厚度-最终厚度),可准确确定材料损失。为获取厚度(每一基板之间具有相当大的公差),可使用公式厚度=质量/(表面积x密度)。密度是基板120的性质。由称重秤340准确测量质量。由照相机360测量表面积。由此,使
用以上技术,可准确确定自基板120去除的材料量,且可将其用于终点检测、工艺监控或其他用途。
55.图5为抛光图1的cmp系统中的基板的方法的流程图。在方块510,将一盒预抛光基板装载至湿槽盒站中。盒可包含10个或更多个基板,例如50个基板。将盒中的基板放置于湿槽盒站112中的流体槽中。盒中包含的基板可能已经过先前的处理操作,例如沉积操作、蚀刻操作或其他操作,现使基板处于需要抛光或平坦化基板的条件下。每一基板具有识别基板的唯一基板id。
56.在方块520,将盒中的基板传送至srd站以用于清清洁。在srd站中,清洗且干燥基板,以在抛光之前自基板去除外来或松弛的材料。干燥基板,以防止清洗流体干扰未来的操作。可视情况将基板移至计量站,以预检查基板的物理参数,用于确定后续计算自基板去除的材料量的基线。举例而言,可在抛光之前由计量站确定基板的初始厚度。或者,可已知基板参数,其允许在不预检查基线信息的情况下将基板直接馈入至抛光器。存储基板的物理参数,且使其与如下文在方块592讨论的对应基板id相关联。举例而言,可将基板的初始厚度及所要的最终厚度存储于数据库中,cmp系统可存取每一唯一的基板id。
57.在方块530,将基板移至抛光单元中的头部清洁装载卸除站。可由与头部清洁装载卸除站相关的机器人移动基板。在头部清洁装载卸除站中,将基板装载至抛光头中,其在抛光单元内的抛光操作期间保持基板。
58.在方块540,基板保持于抛光头中的同时在抛光单元中抛光。基板可需要双侧抛光工艺。在一个实施方式中,垂直抛光基板,使得基板的两侧同时得到抛光。在另一实施方式中,在第一侧上靠向抛光垫水平抛光基板,且随后翻转该基板以抛光基板的第二侧。基板的第一侧及第二侧上可有硬材料,例如sic。可在抛光工艺中使用基于强氧化剂的浆料,以去除硬材料。在抛光之后,基板可移回到湿槽、缓冲位置,或直接回到旋转清洗干燥站。
59.在方块550,将基板移至srd站。srd站使用水或其他合适的溶液清洁基板,以自基板表面去除残余的浆料。srd随后干燥基板。srd站经配置以搬运大多数种类的基板。
60.在方块560,当由srd站清洁基板时,将机器人的终端受动器放置于eerd站中。在eerd站中清洁用于将基板传送至srd站的机器人的终端受动器。在清洁eerd站中的终端受动器之后,终端受动器可自由地自srd站取回现清洁的基板,不会将污染物重引入至基板。对于例示性cmp应用,将未抛光的基板带入并设置于工艺前槽中。机器人叶片拾取此基板,且将基板传送至抛光单元以用于抛光基板。在抛光之后,由同一机器人叶片拾取常由工艺化学物质弄湿的基板,并将其移至后续的工艺站,例如srd站。当机器人叶片仅搬运湿基板时,清洁后基板的交叉污染或再污染的风险最小。然而,当需要在抛光步骤之后干燥经处理的基板时,使用同一机器人叶片传送湿及干基板可引入极高的干基板污染风险。有利地,通过使用eerd站在用于传送湿及干基板之间清洁终端受动器,基本上减小对清洁后干基板的表面重引入污染物的风险。eerd站有益地清洁机器人终端受动器(叶片),实现使用单一终端受动器无缝传送湿(且污染)及干(且清洁)的基板,而不需要两个单独的昂贵机器人,或不减少工艺处理量。
61.在方块570,由现清洁的机器人终端受动器将清洁的基板自srd站移动至计量站。计量站包括高准确度的称重秤及照相机,以在单次快速通过中测量表面积及基板id。计量站包括用于提高基板id的读取准确度的背光。
62.在方块580,在计量站测量基板的重量。由高精度测量装置测量重量。
63.在方块590,由照相机读取基板id。另外由照相机测量表面积。在数据库或其他计算机启用系统中记录基板id。使用基板id使计量结果与每一个别基板相关,用于进一步评估及配方调整。位于基板下方的照明系统提供安装于基板上方的照相机的基板id的较佳对比度。选择照明系统与基板之间及基板与照相机之间的间距,以增强基板id的检测。照明单元照亮基板的底侧,提供照相机的较佳对比度,以准确确定基板表面积。照明及照相机系统实现对不透明或半透明基板的搬运,例如半透明的sic晶片及常规的镜像不透明晶片。
64.照相机可获取常规或镜像的图像,以计算表面积并且确定基板id。
65.使用如上所述的公式(初始厚度-最终厚度),可准确确定由抛光导致的基板的抛光后材料损失,即抛光后基板厚度。使用以上技术,可极快且准确地在cmp系统原位检查所去除的材料量。
66.在方块592,在数据库中记录自基板去除的材料量,且使其与基板id相关。另外,也可在数据库中记录基板的重量及表面积,且使其与基板id相关。当基板在cmp系统中移动时,可在配方中调整用于抛光基板的操作,以实现所要的层厚度或自基板去除的材料量。举例而言,当确定基板的抛光后厚度小于目标厚度时,将基板返回至抛光单元,并且执行所选的新的抛光配方,以去除到达目标厚度所需的材料量。或者在另一实例中,当确定去除的材料量使基板厚度为所要的最终厚度时,将基板移动至干盒。
67.在本文描述的实施方式中,由系统控制器160引导cmp系统100(包括计量站300及eerd站200)的操作。系统控制器160包括可编程中央处理单元(central processing unit;cpu)181,其可用存储器182(例如非易失性存储器)及支持电路183操作。支持电路183常规地耦接至cpu 181,包含高速缓存、时钟电路、输入/输出子系统、电源及类似者及其组合,其耦接至cmp系统100的各个部件以便于控制。cpu 181为用于工业环境中的任何形式的通用计算机处理器之一,例如可编程逻辑控制器(programmable logic controller;plc),其用于控制处理系统的各个部件及子部件。存储器182耦接至cpu 181,为非瞬时性的,且通常为一个或多个容易获得的存储器,例如随机存取存储器(random access memory;ram)、只读存储器(read only memory;rom)、软磁盘、硬盘或任何其他形式的局部或远程的数字储存器。抛光配方、基板id、计量结果(例如表面积、重量等)、确定(例如厚度、所去除的材料量等)、其他物理基板信息(例如密度等)及其他信息存储于存储器182中,可由控制器160以其他方式存取。
68.通常,存储器182为包含指令的非瞬时性计算机可读存储介质的形式(例如非易失性存储器),当由cpu 181执行时,其有助于cmp系统100的操作。存储器182中的指令为程序产品的形式,例如实施本公开内容的方法的程序。程序代码可符合多种不同程序语言中的任一者。在一个实例中,可将公开内容实施为用于计算机系统的计算机可读存储介质上存储的程序产品。程序产品的程序定义实施方式(包括本文描述的方法)的功能。
69.说明性非瞬时性计算机可读存储介质包括但不限于:(1)非可写存储介质(例如计算机中的只读存储器器件,例如cd-rom驱动器可读的cd-rom盘、闪存、rom芯片或任何类型的固态非易失性半导体存储器器件,例如固态硬盘(solid state drive;ssd)),可在其上永久存储信息;及(2)可写存储介质(例如磁盘驱动器或硬盘机或任何类型的固态随机存取半导体存储器),其上存储可变信息。携载引导本文描述的方法的功能的计算机可读指令的
此类计算机可读存储介质为本公开内容的实施方式。在一些实施方式中,用一个或多个转用集成电路(application specific integrated circuit;asic)、现场可编程门阵列(field-programmable gate array;fpga)或其他类型的硬件实施方式执行本文阐述的方法或其一部分。在一些其他实施方式中,用软件例程、asic、fpga和/或其他类型的硬件实施方式的组合执行本文阐述的基板处理和/或处置方法。一个或多个系统控制器180可用于本文描述的各个模块化抛光系统中的一者或任何组合和/或其个别的抛光站。
70.本文公开的实施方式减少抛光sic基板所需的设备及搬运的量。由此,cmp系统可大体上在无人工介入的情况下用高度自动化的方式执行上文提及的所有功能。cmp系统能够搬运大多数类型的基板,例如具有平面特征、凹口特征的基板和/或不同尺寸的基板。eerd站有利地经配置以清洁机器人叶片,以减少所需的机器人数量以及自srd站传送至清洁基板的污染物。计量站还使重量、厚度、材料去除及其他信息经由基板id与唯一的基板相关,改良工艺控制、处理量及产品良率。
71.虽然上文涉及本公开内容的实施方式,但可在不脱离基本范围的情况下设计本公开内容的其他及另外的实施方式,下文的权利要求确定范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1