基于EHA的三角砂带抛光头、打磨机器人及其调整方法与流程
本发明涉及打磨,尤其是指一种基于eha的三角砂带抛光头、打磨机器人及其调整方法。
背景技术:
1、为满足工件表面精度和粗糙度要求,生产工序中会设定打磨和抛光工艺,是保证工件加工质量的重要工序。作为制造业中最普遍的生产工序之一,目前仍有很多企业用人工进行打磨抛光。打磨时打磨头与工件接触产生作用力,接触力的大小是影响打磨质量的重要因素;打磨时会产生震动人工打磨很难控制打磨头与工件的作用力,导致效率低下、不良率高,打磨后表面粗糙度不均匀等问题。打磨抛光时产生的粉尘、震动,噪声等对人体造成伤害也一直困扰各企业,使打磨行业成为了高危行业。随着现代化社会飞速发展人民生活水平的提高,人们对健康生活有了更高的追求,从事高危行业工作的工人越来越少。特别是重工行业,大型工件磨削量较大的场景依靠人工不可能完成的工作,自动化磨削就显得非常重要。针对这一现象各行业一直在寻找一种替代人工的自动化解决方案,随着科学技术的日渐进步市场上也出现了很多自动化打磨设备,但是现有的自动化打磨设备的价格昂贵和打磨效果较差,一直不能在各行业快速普及。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中自动化打磨设备的价格昂贵,打磨效果较差的技术缺陷。
2、为解决上述技术问题,本发明提供了一种基于eha三角砂带抛光头,包括:
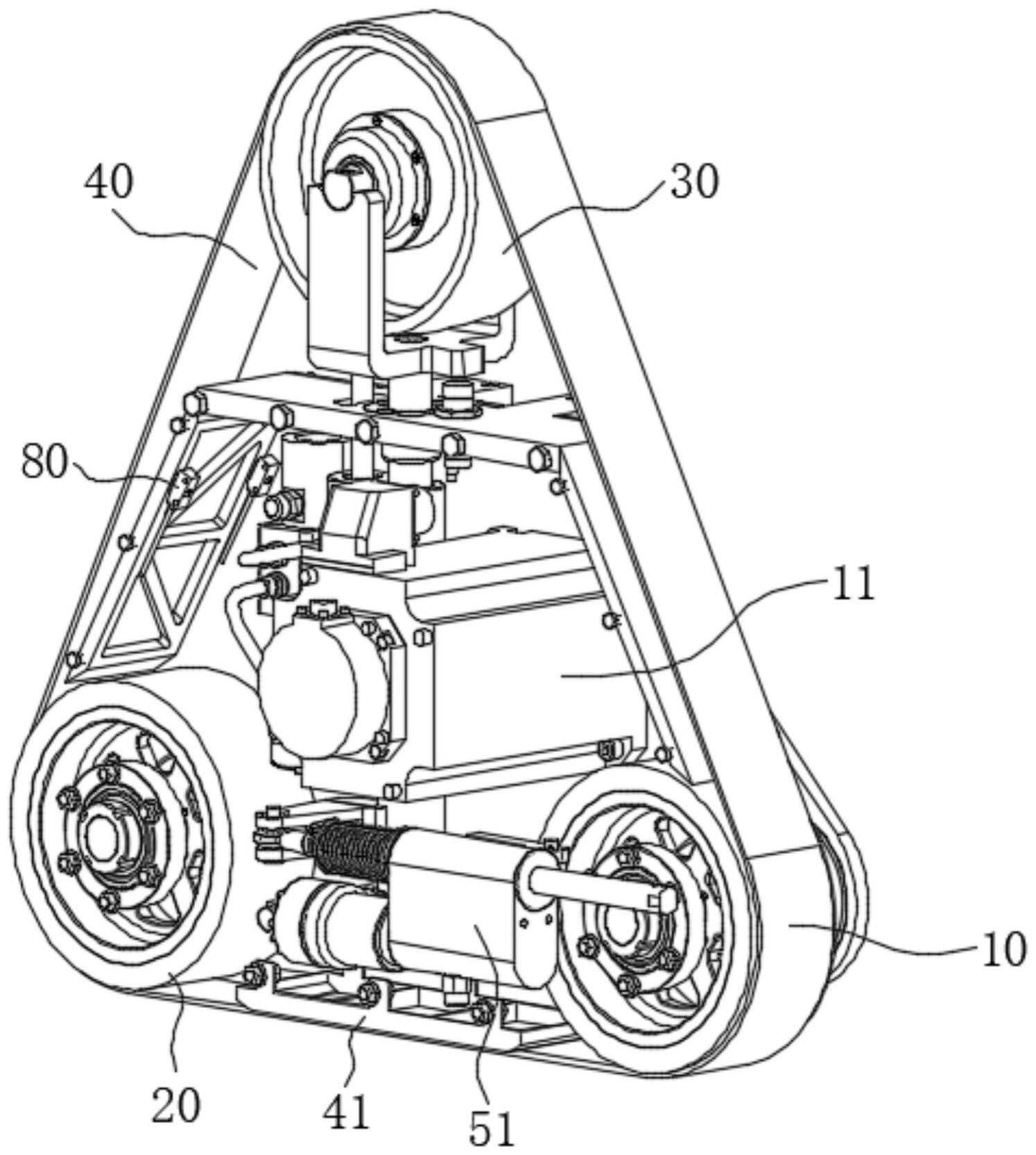
3、轮体组件,所述轮体组件包括驱动轮、随动轮、张紧轮和砂带,所述驱动轮、随动轮和张紧轮呈三角分布,所述砂带依次绕设在驱动轮、随动轮和张紧轮上,当所述驱动轮转动时,所述砂带带动所述随动轮和张紧轮通过转动;
4、张紧驱动组件,所述张紧驱动组件包括第一电液执行器,所述第一电液执行器驱动所述张紧轮沿第一直线方向运动以实现砂带的张紧;
5、纠偏驱动组件,所述纠偏驱动组件包括第二电液执行器,所述第二电液执行器驱动所述张紧轮绕第一直线摆动以实现砂带的纠偏。
6、作为本发明的一个实施例,还包括第一安装座,所述张紧轮安装在第一安装座上;
7、所述张紧驱动组件还包括液压缸和活塞杆,所述活塞杆的一端位于所述液压缸内,所述活塞杆的另一端与第一安装座连接;
8、所述液压缸与第一电液执行器的液压部连通。
9、作为本发明的一个实施例,所述张紧驱动组件还包括直线轴承和导向轴,所述液压缸上设置有凸部,所述凸部上开设有限位孔,所述导向轴穿设在限位孔内,所述导向轴与限位孔之间还设置有直线轴承;
10、所述导向轴与活塞杆平行设置,所述导向轴与第一安装座连接。
11、作为本发明的一个实施例,所述纠偏驱动组件包括铰座,所述铰座一端与第二电液执行器的输出端铰接,所述铰座的另外一端与液压缸的壁面固定;
12、还包括第一连接板,所述液压缸与所述第一连接板之间设置有转动轴承。
13、作为本发明的一个实施例,所述转动轴承为交叉滚子轴承。
14、作为本发明的一个实施例,所述驱动轮包括驱动轴、设置在驱动轴上的第一包胶轮和第一同步轮、第一深沟球轴承、第二深沟球轴承、第一锁紧螺母和第二锁紧螺母;
15、所述第一深沟球轴承的一端与第一锁紧螺母接触,另一端与驱动轴上的隔套接触;
16、所述第二深沟球轴承的一端与第二锁紧螺母接触,另一端与驱动轴接触。
17、作为本发明的一个实施例,所述随动轮包括随动轴、套设在随动轴上的第二包胶轮、第三深沟球轴承、第四深沟球轴承、第三锁紧螺母和第四锁紧螺母;
18、所述第三深沟球轴承的一端与第三锁紧螺母接触,另一端与随动轴的隔套接触;
19、所述第四深沟球轴承的一端与第四锁紧螺母接触,另一端与随动轴接触。
20、作为本发明的一个实施例,所述张紧轮包括张紧轴、套设在张紧轴上的轮体、第五深沟球轴承、第六深沟球轴承、第五锁紧螺母和第六锁紧螺母;
21、所述第五深沟球轴承和第六深沟球轴承设置在张紧轴与轮体之间,所述第五锁紧螺母与第六锁紧螺母配合以将张紧轴与轮体固定。
22、作为本发明的一个实施例,还包括接近传感器和纠偏传感器,所述接近传感器用于检测张紧轮的位置;所述纠偏传感器用于反馈砂带是否跑偏以实现自动纠偏。
23、本发明公开了一种打磨机器人,包括:
24、上述的基于eha三角砂带抛光头;
25、多轴机械手,所述多轴机械手与所述基于eha三角砂带抛光头连接。
26、本发明的上述技术方案相比现有技术具有以下优点:
27、1、本发明通过主动轮转动,可实现随动轮和张紧轮的同步动作,如此,即可实现砂带动作,从而可以打磨工件。
28、2、本发明通过第一电液执行器驱动张紧轮沿第一直线方向运动,以调节砂带的张紧力。具体的,当砂带过紧时,通过第一电液执行器驱动张紧轮往回缩,如此,可以减小砂带的张紧力;当砂带过松时,通过第一电液执行器驱动张紧轮往前顶,如此可以增大砂带的张紧力。
29、3、本发明通过第二电液执行器驱动张紧轮绕第一直线方向转动,如此,可以调整砂带的位置,从而实现自动纠偏。
30、4、本发明中的三角砂带抛光头稳定性强,成本低,加工精度高,自动化程度高。
技术特征:
1.一种基于eha三角砂带抛光头,其特征在于,包括:
2.根据权利要求1所述的基于eha三角砂带抛光头,其特征在于,还包括第一安装座,所述张紧轮安装在第一安装座上;
3.根据权利要求2所述的基于eha三角砂带抛光头,其特征在于,所述张紧驱动组件还包括直线轴承和导向轴,所述液压缸上设置有凸部,所述凸部上开设有限位孔,所述导向轴穿设在限位孔内,所述导向轴与限位孔之间还设置有直线轴承;
4.根据权利要求2所述的基于eha三角砂带抛光头,其特征在于,
5.根据权利要求4所述的基于eha三角砂带抛光头,其特征在于,所述转动轴承为交叉滚子轴承。
6.根据权利要求1所述的基于eha三角砂带抛光头,其特征在于,所述驱动轮包括驱动轴、设置在驱动轴上的第一包胶轮和第一同步轮、第一深沟球轴承、第二深沟球轴承、第一锁紧螺母和第二锁紧螺母;
7.根据权利要求1所述的基于eha三角砂带抛光头,其特征在于,所述随动轮包括随动轴、套设在随动轴上的第二包胶轮、第三深沟球轴承、第四深沟球轴承、第三锁紧螺母和第四锁紧螺母;
8.根据权利要求1所述的基于eha三角砂带抛光头,其特征在于,所述张紧轮包括张紧轴、套设在张紧轴上的轮体、第五深沟球轴承、第六深沟球轴承、第五锁紧螺母和第六锁紧螺母;
9.根据权利要求1所述的基于eha三角砂带抛光头,其特征在于,还包括接近传感器和纠偏传感器,所述接近传感器用于检测张紧轮的位置;所述纠偏传感器用于反馈砂带是否跑偏以实现自动纠偏。
10.一种打磨机器人,其特征在于,包括:
技术总结
本发明涉及一种基于EHA的三角砂带抛光头、打磨机器人及其调整方法,包括:轮体组件,所述轮体组件包括驱动轮、随动轮、张紧轮和砂带,所述驱动轮、随动轮和张紧轮呈三角分布,所述砂带依次绕设在驱动轮、随动轮和张紧轮上,当所述驱动轮转动时,所述砂带带动所述随动轮和张紧轮通过转动;张紧驱动组件,所述张紧驱动组件包括第一电液执行器,所述第一电液执行器驱动所述张紧轮沿第一直线方向运动以实现砂带的张紧;纠偏驱动组件,所述纠偏驱动组件包括第二电液执行器,所述第二电液执行器驱动所述张紧轮绕第一直线摆动以实现砂带的纠偏。其能够实现砂带的张紧与纠偏,自动化程度高,稳定性好。
技术研发人员:李建伟,韩乾坤
受保护的技术使用者:上海赛威德机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!