一种无偏差定位数控车床及其自动寻点方法与流程
本发明属于车床加工,具体涉及一种无偏差定位数控车床及其自动寻点方法。
背景技术:
1、数控车床是目前使用较为广泛的数控机床之一,它主要用于轴类零件或盘类零件的内外圆柱面、任意锥角的内外圆锥面、复杂回转内外曲面和圆柱、圆锥螺纹等切削加工,并能进行切槽、钻孔、扩孔、铰孔及镗孔等。数控车床可对打磨件进行精确加工,故而数控车床在加工过程中需要对打磨件进行精确固定,现有的车床夹具不方便定位,不能方便的进行夹紧锁死,避免工件掉落,对人身安全造成威胁,并且损坏工件,浪费资源,而夹持不稳定时,也会影响工件制造的准确性,不能快速的对工件进行定位。
技术实现思路
1、为解决现有技术存在的不足,本发明提供了一种无偏差定位数控车床及其自动寻点方法。
2、为实现上述目的,本发明提供了以下技术方案:
3、一种无偏差定位数控车床及其自动寻点方法,包括机架,所述机架的上端设有定位模组,所述定位模组包括第一安装块,所述第一安装块的两端设有第一置物块,所述第一置物块上设有第一置物槽,所述机架的左端设有第一倒角车削机构,所述机架的右端设有第二倒角车削机构,所述第一安装块的两端设有第一导轨,所述第一导轨上设有第一滑块,所述第一滑块的上端设有第一定位块,所述第一安装块的中部设有第一套筒,所述第一套筒的下端设有第一支撑板,所述第一支撑板的下端设有第三驱动电机,所述第一套筒内设有第三转轴,所述第三转轴的下端与所述第三驱动电机相连接,所述第三转轴的上端穿过所述第一安装块设有第二定位块。
4、进一步地,所述第一倒角车削机构包括第一安装架,所述第一安装架的左端设有第一驱动电机,所述第一安装架的两端设有第一转轴,所述第一转轴的左端设有第一皮带轮,所述第一驱动电机的右端设有第二皮带轮,所述第一皮带轮与所述第二皮带轮通过第一皮带相连接,所述第一转轴的右端设有第一车削头。
5、进一步地,所述第二倒角车削机构包括第二安装架,所述第二安装架的右端设有第二驱动电机,所述第二安装架的两端设有第二转轴,所述第二转轴的右端设有第三皮带轮,所述第二驱动电机的左端设有第四皮带轮,所述第三皮带轮与所述第四皮带轮通过第二皮带相连接,所述第二转轴的左端设有第二车削头。
6、进一步地,所述第一安装块的两端设有第四驱动电机,所述第四驱动电机的下端设有第一齿轮,所述机架的两端设有第二套筒,所述第二套筒内设有第一伸缩杆,所述第一伸缩杆的上端与所述第一滑块相连接,所述第一伸缩杆的下端通过所述第四驱动电机驱动升降。
7、进一步地,所述机架的上端设有收集筐,所述收集筐的两端设有废料下料口,所述机架的下端设有废料箱,所述废料下料口对应于所述废料箱的上方。
8、进一步地,所述机架的下端设有气泵,所述气泵的上端设有吹气管,所述吹气管与所述第一车削头和所述第二车削头相对应。
9、一种无偏差定位数控车床的自动寻点方法,包括以下步骤:
10、步骤一:第四驱动电机驱动第一伸缩杆上升,使得第一定位块抵在第一置物槽的左端,放置待加工的产品抵在第一定位块上,完成第一步寻点定位;
11、步骤二:第四驱动电机驱动第一伸缩杆下降,第三驱动电机驱动第二定位块转动,第二定位块抵在待加工的产品上,完成第二部寻点定位。
12、本发明公开的一种无偏差定位数控车床及其自动寻点方法,与现有技术相比,其有益效果在于,其能够准确地定位产品并完成加工,结构稳定可靠,定位无偏差,安全高效。
技术特征:
1.一种无偏差定位数控车床,其特征在于,包括机架(100),所述机架(100)的上端设有定位模组,所述定位模组包括第一安装块(210),所述第一安装块(210)的两端设有第一置物块(220),所述第一置物块(220)上设有第一置物槽,所述机架(100)的左端设有第一倒角车削机构,所述机架(100)的右端设有第二倒角车削机构,所述第一安装块(210)的两端设有第一导轨(211),所述第一导轨(211)上设有第一滑块(230),所述第一滑块(230)的上端设有第一定位块(231),所述第一安装块(210)的中部设有第一套筒(260),所述第一套筒(260)的下端设有第一支撑板(250),所述第一支撑板(250)的下端设有第三驱动电机(270),所述第一套筒(260)内设有第三转轴,所述第三转轴的下端与所述第三驱动电机(270)相连接,所述第三转轴的上端穿过所述第一安装块(210)设有第二定位块(240)。
2.根据权利要求1所述的无偏差定位数控车床,其特征在于,所述第一倒角车削机构包括第一安装架(300),所述第一安装架(300)的左端设有第一驱动电机(310),所述第一安装架(300)的两端设有第一转轴(320),所述第一转轴(320)的左端设有第一皮带(340)轮,所述第一驱动电机(310)的右端设有第二皮带轮,所述第一皮带(340)轮与所述第二皮带轮通过第一皮带(340)相连接,所述第一转轴(320)的右端设有第一车削头(330)。
3.根据权利要求2所述的无偏差定位数控车床,其特征在于,所述第二倒角车削机构包括第二安装架(400),所述第二安装架(400)的右端设有第二驱动电机(410),所述第二安装架(400)的两端设有第二转轴,所述第二转轴的右端设有第三皮带轮,所述第二驱动电机(410)的左端设有第四皮带轮,所述第三皮带轮与所述第四皮带轮通过第二皮带相连接,所述第二转轴的左端设有第二车削头。
4.根据权利要求3所述的无偏差定位数控车床,其特征在于,所述第一安装块(210)的两端设有第四驱动电机(280),所述第四驱动电机(280)的下端设有第一齿轮(311),所述机架(100)的两端设有第二套筒(290),所述第二套筒(290)内设有第一伸缩杆(291),所述第一伸缩杆(291)的上端与所述第一滑块(230)相连接,所述第一伸缩杆(291)的下端通过所述第四驱动电机(280)驱动升降。
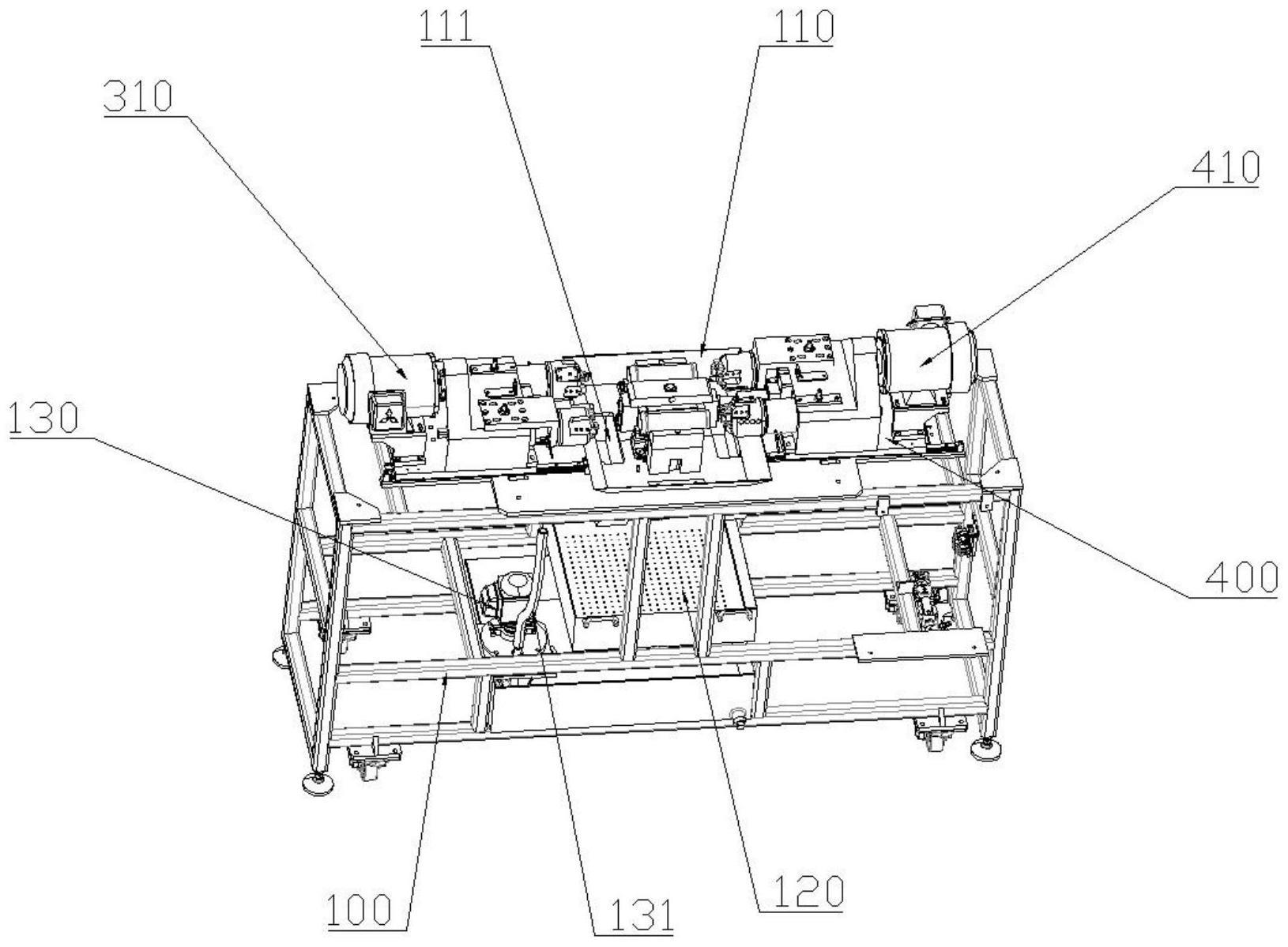
5.根据权利要求4所述的无偏差定位数控车床,其特征在于,所述机架(100)的上端设有收集筐(110),所述收集筐(110)的两端设有废料下料口(110),所述机架(100)的下端设有废料箱(120),所述废料下料口(110)对应于所述废料箱(120)的上方。
6.根据权利要求5所述的无偏差定位数控车床,其特征在于,所述机架(100)的下端设有气泵(130),所述气泵(130)的上端设有吹气管(131),所述吹气管(131)与所述第一车削头(330)和所述第二车削头相对应。
7.一种无偏差定位数控车床的自动寻点方法,根据权利要求1-6任一所述的无偏差定位数控车床实施,其特征在于,包括以下步骤:
技术总结
本发明公开了一种无偏差定位数控车床及其自动寻点方法,包括机架,机架的上端设有定位模组,定位模组包括第一安装块,第一安装块的两端设有第一置物块,第一置物块上设有第一置物槽,第一安装块的两端设有第一导轨,第一导轨上设有第一滑块,第一滑块的上端设有第一定位块,第一安装块的中部设有第一套筒,第一套筒的下端设有第一支撑板,第一支撑板的下端设有第三驱动电机,第一套筒内设有第三转轴,第三转轴的下端与第三驱动电机相连接,第三转轴的上端穿过第一安装块设有第二定位块。本发明提供的一种无偏差定位数控车床及其自动寻点方法,其能够准确地定位产品并完成加工,结构稳定可靠,定位无偏差,安全高效。
技术研发人员:俞铠,李新鸿,张寅,费俊立,陈杰
受保护的技术使用者:浙江佑润机械制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!