研磨液臂、化学机械抛光系统及研磨液臂的操作方法与流程
本公开涉及半导体领域,尤其涉及一种研磨液臂、化学机械抛光系统及研磨液臂的操作方法。
背景技术:
1、化学机械抛光(cmp)单元主要包括研磨平台(platen)、研磨头(head)和研磨液臂(slurry arm)组成,其中研磨液的落点对研磨的平整度至关重要;但目前主流机台研磨液臂的研磨液的落点位置由人为测量或者选择某一参照物进行定位,该方法存在很大误差,另外为了改善整体制程效果,需要移动研磨液臂的位置,但主流机台研磨液臂的位置只能左右移动而不能前后伸缩,无法满足工艺需求
2、采用现有化学机械抛光(cmp)单元所采用的研磨液臂通常只能左右移动而无法前后伸缩,而且移动的距离往往通过人为测量,误差较大,不能精确控制研磨液的落点位置,难以满足工艺需求。
技术实现思路
1、本公开提供了一种研磨液臂、化学机械抛光系统及研磨液臂的操作方法,以至少解决现有研磨液的落点位置无法精准控制的技术问题。
2、本公开所提供的技术方案如下:
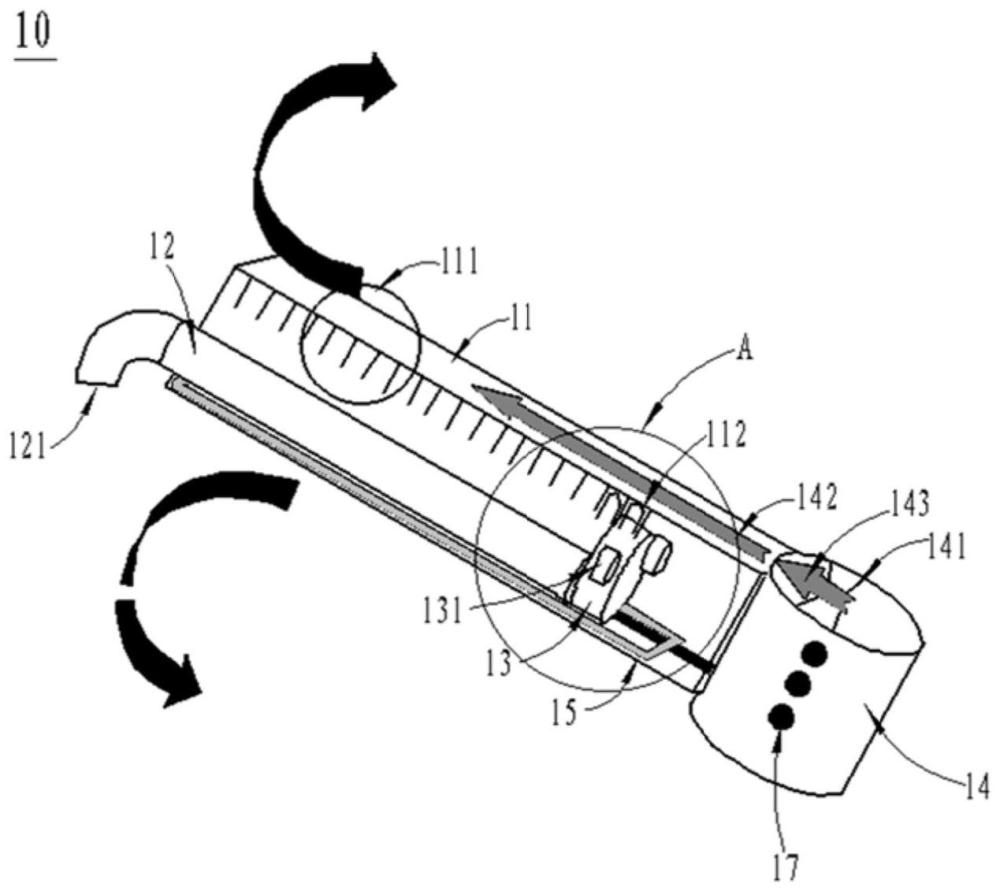
3、根据本公开的第一方面,本公开提供了一种研磨液臂,包括:支撑主体、液管、旋钮和角度调节构件,其中,所述支撑主体沿其长度方向具有刻度标识,所述支撑主体构造为中空腔体;所述液管用于研磨液流出,所述液管位于所述中空腔体内,所述液管与所述中空腔体底部沿所述长度方向滑动配合;所述液管连接于所述旋钮外周靠近其近端,拨动所述旋钮,所述旋钮能够带动所述液管进行沿所述旋钮的周向方向的转动,所述旋钮外周具有卡合结构,所述旋钮通过所述卡合结构与所述支撑主体卡合固定;所述角度调节构件旋转连接于所述支撑主体近端,所述角度调节构件的顶面环周具有角度标识,所述角度调节构件配置为在自身顶面形成与所述支撑主体顶面的同向指针,以用于指示所述支撑主体相对水平面的转动角度。
4、在一可实施方式中,所述研磨液臂还包括导轨和与所述导轨滑动配合的滑块,所述液管与所述滑块固定安装;所述导轨沿所述长度方向安装于所述支撑主体的所述中空腔体的底部。
5、在一可实施方式中,所述研磨液臂还包括导轨,所述导轨沿所述长度方向安装于所述支撑主体的所述中空腔体的底部,所述液管的外廓结构具有凹腔,所述液管通过所述凹腔与所述导轨滑动连接。
6、在一可实施方式中,所述卡合结构构造为相对所述旋钮外壁凸起的结构。
7、在一可实施方式中,所述支撑主体还具有阻挡结构,所述阻挡结构用于与所述卡合结构匹配卡合。
8、在一可实施方式中,所述研磨液臂还包括顶丝结构,所述顶丝结构设置至少三个,各所述顶丝结构穿入所述角度调节构件并与所述支撑主体的近端形成榫卯结构;或者
9、各所述顶丝结构穿入所述角度调节构件并与所述支撑主体的近端抵接。
10、在一可实施方式中,所述角度调节构件构造为圆柱体结构。
11、在一可实施方式中,所述角度调节构件包括第一指针和第二指针,所述第一指针用于指示所述支撑主体所在方向,所述第二指针用于指示基准方向,所述第一指针与所述第二指针之间的夹角用于在所述角度调节构件上指示出所述支撑主体的转动角度。
12、根据本公开的第二方面,本公开提供了一种化学机械抛光系统,包括上述的研磨液臂,还包括:用于承载晶元的研磨平台和用于在所述研磨平台表面对所述晶元进行研磨的研磨头;
13、所述研磨液臂横设于所述研磨平台上方,所述研磨液臂的所述液管在移动及跟随所述研磨液臂转动的过程中,能够调整研磨液低落至所述研磨平台的落点位置。
14、根据本公开的第三方面,本公开提供了一种研磨液臂的操作方法,应用上述的研磨液臂,该方法包括:
15、确定研磨液的落点位置;
16、根据所述落点位置,确定所述研磨液臂的目标长度和目标角度;
17、控制所述液管向前或向后移动,以使得所述研磨液臂的长度达到所述目标长度;
18、控制所述支撑主体相对所述角度调节构件向左或向右摆动,以使得所述研磨液臂的转动角度达到所述目标角度。
19、本公开所带来的有益效果如下:
20、本公开所提供的研磨液臂、化学机械抛光系统及研磨液臂的操作方法,采用液管跟随旋钮沿其长度方向相对中空腔体进行滑动,能够调整液管相对支撑主体端口的伸出距离,也就是能够调整液管的管口的其中一方向的位置,另外,拨动旋钮,液管还能够跟随旋钮沿旋钮的周向方向进行相对支撑柱体的旋进或旋出,相当于向外拉动液管或向里推动液管。这样,旋钮在旋拧过程中,通过卡合结构实现与支撑主体的卡合固定。进一步的,支撑主体与角度调节构件可拆卸连接,支撑主体能够相对角度调节构件进行转动,初始位置时,角度调节构件自身顶面与支撑主体顶面具有同向指针,当支撑主体相对角度调节构件进行转动后,角度调节构件自身顶面的指针与支撑主体顶面的指针形成夹角,该夹角的角度为支撑主体的转动角度。这样,可以通过调整固定的转动角度和沿长度方向的滑动距离,来确定液管伸出支撑主体端口的位置,进而调整液管中研磨液的落点位置。
21、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种研磨液臂,其特征在于,包括:
2.根据权利要求1所述的研磨液臂,其特征在于,所述研磨液臂还包括导轨和与所述导轨滑动配合的滑块,所述液管与所述滑块固定安装;所述导轨沿所述长度方向安装于所述支撑主体的所述中空腔体的底部。
3.根据权利要求1所述的研磨液臂,其特征在于,所述研磨液臂还包括导轨,所述导轨沿所述长度方向安装于所述支撑主体的所述中空腔体的底部,所述液管的外廓结构具有凹腔,所述液管通过所述凹腔与所述导轨滑动连接。
4.根据权利要求1所述的研磨液臂,其特征在于,所述卡合结构构造为相对所述旋钮外壁凸起的结构。
5.根据权利要求4所述的研磨液臂,其特征在于,所述支撑主体还具有阻挡结构,所述阻挡结构用于与所述卡合结构匹配卡合。
6.根据权利要求1所述的研磨液臂,其特征在于,所述研磨液臂还包括顶丝结构,所述顶丝结构设置至少三个,各所述顶丝结构穿入所述角度调节构件并与所述支撑主体的近端形成榫卯结构;或者
7.根据权利要求1所述的研磨液臂,其特征在于,所述角度调节构件构造为圆柱体结构。
8.根据权利要求7所述的研磨液臂,其特征在于,所述角度调节构件包括第一指针和第二指针,所述第一指针用于指示所述支撑主体所在方向,所述第二指针用于指示基准方向,所述第一指针与所述第二指针之间的夹角用于在所述角度调节构件上指示出所述支撑主体的转动角度。
9.一种化学机械抛光系统,其特征在于,包括如权利要求1-8任一项所述的研磨液臂,还包括:用于承载晶元的研磨平台和用于在所述研磨平台表面对所述晶元进行研磨的研磨头;
10.一种研磨液臂的操作方法,应用如权利要求1-8任一项所述的研磨液臂,其特征在于,所述方法包括:
技术总结
本申请公开了一种研磨液臂、化学机械抛光系统及研磨液臂的操作方法,涉及半导体领域。该研磨液臂包括:支撑主体、液管、旋钮和角度调节构件,其中,支撑主体沿其长度方向具有刻度标识,支撑主体构造为中空腔体;液管用于研磨液流出,液管与中空腔体底部沿长度方向滑动配合;液管连接于旋钮外周靠近其近端,旋钮能够带动液管进行旋钮周向方向的转动,旋钮外周具有卡合结构,旋钮通过卡合结构与支撑主体卡合固定;角度调节构件旋转连接于支撑主体近端,角度调节构件的顶面环周具有角度标识,角度调节构件配置为在自身顶面形成与支撑主体顶面的同向指针,以用于指示支撑主体相对水平面的转动角度。采用本方案能够精准调节研磨液的落点位置。
技术研发人员:张士林,张文博,佘桃慈
受保护的技术使用者:杭州富芯半导体有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!