一种机械臂刀剪开刃的数控砂轮修整补偿机构的制作方法
本技术涉及五金刀剪,尤其涉及一种机械臂刀剪开刃的数控砂轮修整补偿机构。
背景技术:
1、“开刃”是五金刀剪的最后一道工序,这道工序的好坏直接决定刀剪的锋利度。在当下的生产工艺中,仍有部分采用传统人工,凭借师傅的经验手艺来完成开刃工序,但是由于国内生产工艺的优化、产业的升级、关节机械臂的普及等因素的影响,这道过度依赖主观意识的工艺,也已从传统手艺逐步向数字自动化改造升级。
2、利用关节机械臂精密且稳定的动作来完成开刃工序,开刃工序中所采用的砂轮是一种不稳定的损耗件,而砂轮机是固定旋转的,在实际应用中,与经验师傅主观判断刀剪的给进量不同,机械臂是重复往返运动的,其难以模拟人为意识判断砂轮的损耗量,因此,现亟需开发一种机械臂刀剪开刃的数控砂轮修整补偿机构。
技术实现思路
1、针对上述现有技术存在的缺陷,本实用新型的目的在于提供一种机械臂刀剪开刃的数控砂轮修整补偿机构,解决机械臂不能自行判断给进量的问题。
2、本实用新型解决其技术问题所采用的技术方案是:
3、一种机械臂刀剪开刃的数控砂轮修整补偿机构,包括模组支架,所述模组支架上设有纵向移动模组,所述纵向移动模组上设有第一模组滑台,所述第一模组滑台上连接有横向移动模组,所述横向移动模组上设有第二模组滑台,所述第二模组滑台上连接有延长悬臂,所述延长悬臂的长度方向与所述横向移动模组的长度方向平行,所述延长悬臂的末端底部设有修整器。
4、进一步的,所述纵向移动模组包括纵向移动本体、驱动机构和直线导轨机构,所述直线导轨机构设在所述纵向移动本体上,所述第一模组滑台设在所述直线导轨机构上。
5、进一步的,所述驱动机构包括驱动电机和联轴器,所述驱动电机设在所述纵向移动本体上方,所述联轴器设在所述驱动电机的下方,所述驱动电机用于驱动所述直线导轨机构上的所述第一模组滑台。
6、进一步的,所述直线导轨机构包括纵向导台和纵向丝杆,所述第一模组滑台上设有沿所述纵向导台移动的导槽,所述第一模组滑台连接所述纵向丝杆。
7、进一步的,所述横向移动模组包括横向移动本体、手摇移动机构和手摇轮,所述手摇移动机构设在所述横向移动本体上,所述手摇轮设在所述手摇移动机构的一端,所述第二模组滑台设在所述手摇移动机构上。
8、进一步的,所述手摇移动机构包括横向导杆和横向丝杆,所述第二模组滑台上设有供所述横向导杆穿过的导向孔,所述第二模组滑台连接所述横向丝杆。
9、进一步的,还包括连接板,所述连接板分别连接所述第一模组滑台和所述横向移动模组。
10、进一步的,所述纵向移动模组相对于所述模组支架的高度可调节。
11、进一步的,还包括防水罩,所述纵向移动模组和所述横向移动模组设在所述防水罩内,所述延长悬臂延伸出所述防水罩。
12、进一步的,所述模组支架呈l型。
13、本实用新型的有益效果是:
14、本实用新型利用纵向移动模组调节修整器在垂直方向的移动,利用横向移动模组调节修整器在水平方向的移动,每次加工完一个工件后,修整器就向下移动一个固定的补偿数值并修整砂轮的磨砂面,机械臂随之向下移动一个补偿数值,如此工件每次都打磨在平整的砂轮上,与现有技术相比,本实用新型解决了机械臂不能自行判断给进量的问题。
技术特征:
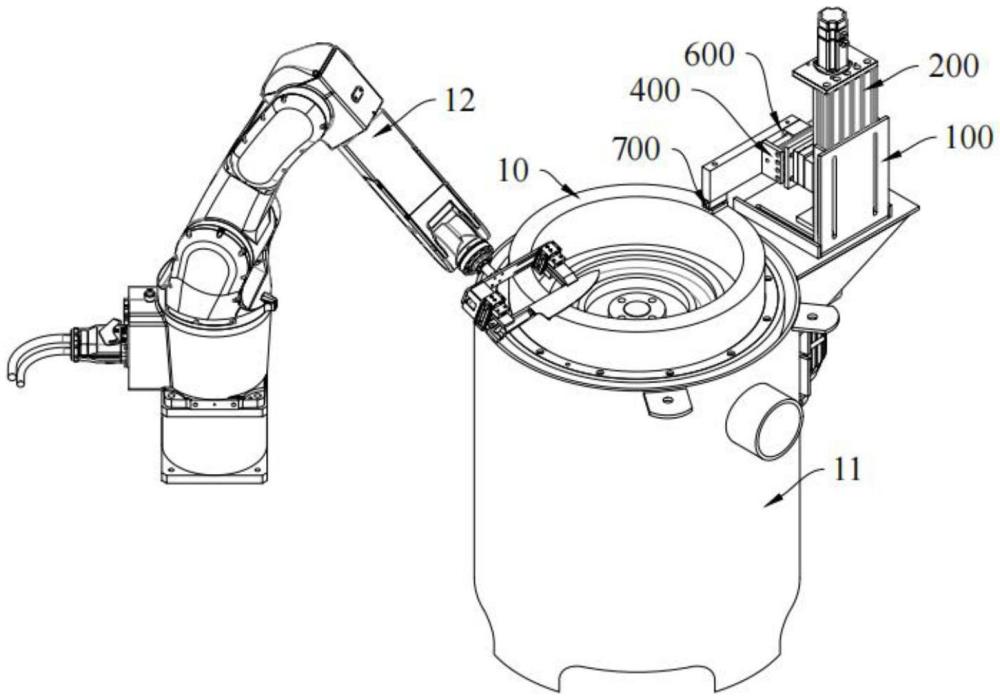
1.一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,包括模组支架(100),所述模组支架(100)上设有纵向移动模组(200),所述纵向移动模组(200)上设有第一模组滑台(300),所述第一模组滑台(300)上连接有横向移动模组(400),所述横向移动模组(400)上设有第二模组滑台(500),所述第二模组滑台(500)上连接有延长悬臂(600),所述延长悬臂(600)的长度方向与所述横向移动模组(400)的长度方向平行,所述延长悬臂(600)的末端底部设有修整器(700)。
2.根据权利要求1所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,所述纵向移动模组(200)包括纵向移动本体(210)、驱动机构(220)和直线导轨机构(230),所述直线导轨机构(230)设在所述纵向移动本体(210)上,所述第一模组滑台(300)设在所述直线导轨机构(230)上。
3.根据权利要求2所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,所述驱动机构(220)包括驱动电机(221)和联轴器(222),所述驱动电机(221)设在所述纵向移动本体(210)上方,所述联轴器(222)设在所述驱动电机(221)的下方,所述驱动电机(221)用于驱动所述直线导轨机构(230)上的所述第一模组滑台(300)。
4.根据权利要求2所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,所述直线导轨机构(230)包括纵向导台(231)和纵向丝杆(232),所述第一模组滑台(300)上设有沿所述纵向导台(231)移动的导槽(310),所述第一模组滑台(300)连接所述纵向丝杆(232)。
5.根据权利要求1所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,所述横向移动模组(400)包括横向移动本体(410)、手摇移动机构(420)和手摇轮(430),所述手摇移动机构(420)设在所述横向移动本体(410)上,所述手摇轮(430)设在所述手摇移动机构(420)的一端,所述第二模组滑台(500)设在所述手摇移动机构(420)上。
6.根据权利要求5所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,所述手摇移动机构(420)包括横向导杆(421)和横向丝杆(422),所述第二模组滑台(500)上设有供所述横向导杆(421)穿过的导向孔(510),所述第二模组滑台(500)连接所述横向丝杆(422)。
7.根据权利要求1所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,还包括连接板(800),所述连接板(800)分别连接所述第一模组滑台(300)和所述横向移动模组(400)。
8.根据权利要求1所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,所述纵向移动模组(200)相对于所述模组支架(100)的高度可调节。
9.根据权利要求1所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,还包括防水罩(900),所述纵向移动模组(200)和所述横向移动模组(400)设在所述防水罩(900)内,所述延长悬臂(600)延伸出所述防水罩(900)。
10.根据权利要求1所述的一种机械臂刀剪开刃的数控砂轮修整补偿机构,其特征在于,所述模组支架(100)呈l型。
技术总结
本技术公开了一种机械臂刀剪开刃的数控砂轮修整补偿机构,包括模组支架,模组支架上设有纵向移动模组,纵向移动模组上设有第一模组滑台,第一模组滑台上连接有横向移动模组,横向移动模组上设有第二模组滑台,第二模组滑台上连接有延长悬臂,延长悬臂的长度方向与横向移动模组的长度方向平行,延长悬臂的末端底部设有修整器,该数控砂轮修整补偿机构解决了机械臂不能自行判断给进量的问题。
技术研发人员:杨智聪,梁迅炜
受保护的技术使用者:广东科拓自动化机械设备有限公司
技术研发日:20230808
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!