一种应用于龙门式制坨机的熔石英坨制备方法与流程
1.本发明涉及生产熔石英制品的专用方法技术领域,具体而言,涉及一种应用于龙门式制坨机的熔石英坨制备方法。
背景技术:
2.就目前而言,熔石英坨制备通常为四氟化硅气体与氢气氧气混合气体燃烧形成二氧化硅液体后直接在制坨机摊开进行沉积而形成。然而,以此方法沉积而形成的熔石英坨存在以下问题:制坨机通常为高温环境下运作,此状态下制坨机的负载较大,无法以制坨机的负载程度精确控制制坨机的工作,容易导致二氧化硅液体沉积制备熔石英坨的过程中出现不均匀等情况,导致熔石英坨无法满足后续的应用及加工要求,造成经济损失。基于此,我们设计了一种应用于龙门式制坨机的熔石英坨制备方法,用以克服上述问题。
技术实现要素:
3.本发明的目的在于提供一种应用于龙门式制坨机的熔石英坨制备方法,其用于解决背景技术所提及的相应技术问题。
4.本发明的实施例通过以下技术方案实现:
5.一种应用于龙门式制坨机的熔石英坨制备方法,该方法的步骤包括:
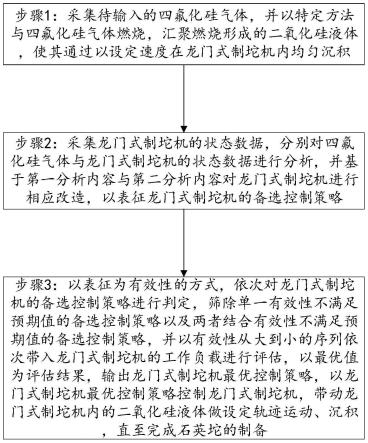
6.步骤1:采集待输入的四氟化硅气体,并以特定方法与四氟化硅气体燃烧,汇聚燃烧形成的二氧化硅液体,使其通过以设定速度在龙门式制坨机内均匀沉积;
7.步骤2:采集龙门式制坨机的状态数据,分别对四氟化硅气体与龙门式制坨机的状态数据进行分析,并基于第一分析内容与第二分析内容对龙门式制坨机进行相应改造,以表征龙门式制坨机的备选控制策略;
8.步骤3:以表征为有效性的方式,依次对龙门式制坨机的备选控制策略进行判定,筛除单一有效性不满足预期值的备选控制策略以及两者结合有效性不满足预期值的备选控制策略,并以有效性从大到小的序列依次带入龙门式制坨机的工作负载进行评估,以最优值为评估结果,输出龙门式制坨机最优控制策略,以龙门式制坨机最优控制策略控制龙门式制坨机,带动龙门式制坨机内的二氧化硅液体做设定轨迹运动、沉积,直至完成熔石英坨的制备。
9.可选的,步骤1中所述的以特定方法与四氟化硅气体燃烧,特定方法具体为:在设定气体压强的环境中,通过氢气与氧气混合对四氟化硅气体以设定温度进行燃烧,直至达到设定时长,形成融化后的二氧化硅液体与氯化氢气体,之后汇聚二氧化硅液体,其中,设定气体压强、设定温度与设定时长具体根据待输入的四氟化硅气体进行获取并确定,以减少二氧化硅液体的气泡数。
10.可选的,龙门式制坨机包括:龙门机架、升降系统、摆动系统、旋转系统、沉积基础杆夹持装置、沉积基础杆;升降系统的两端分别安装在龙门机架的两侧,摆动系统安装在升降系统的顶部中央,旋转系统安装在摆动系统的顶部中央,沉积基础杆夹持装置的固定端
安装在旋转系统的顶部中央,沉积基础杆的底部安装在沉积基础杆夹持装置的夹持端内;
11.其中,升降系统,用以带动沉积基础杆做升降运动;
12.摆动系统,用以带动沉积基础杆做摆动运动;
13.旋转系统,用以带动沉积基础杆做旋转运动;
14.沉积基础杆夹持装置,用以调整沉积基础杆的姿态,并夹持固定沉积基础杆;
15.沉积基础杆,用以接收以设定速度均匀沉积的二氧化硅液体。
16.可选的,其中,升降系统中设置有同步控制模块,同步控制模块,用以实时获取升降系统两端的位置信号,计算而获取升降系统的两端位置关系及速度差值,输出速度及转矩指令,使得升降系统的两端同步运行。
17.可选的,其中,摆动系统具体通过摆动导轨安装在升降系统的顶部中央,摆动导轨具体为负荷型滚珠线性滑轨,用以带动摆动系统做设定精度的线性运动。
18.可选的,龙门式制坨机的状态数据具体包括龙门式制坨机的工作姿态、龙门式制坨机的负荷重量以及龙门式制坨机的工作温度;
19.其中,龙门式制坨机的状态分析具体为:
20.将龙门式制坨机的工作姿态、龙门式制坨机的负荷重量以及龙门式制坨机的工作温度输入至ansys workbench仿真模块内进行计算,基于计算结果以获取即步骤2中所述的第二分析内容。
21.可选的,龙门式制坨机的工作姿态具体为:升降系统(2)的升降速度、摆动系统(3)的摆动程度以及摆动轨迹、旋转系统(4)的旋转程度以及旋转运动轨迹;步骤2中所述的基于第一分析内容与第二分析内容对龙门式制坨机进行相应改造,即基于第一分析内容与第二分析内容对龙门式制坨机的工作姿态分别或结合进行改造,使得龙门式制坨机以改造后的多种工作姿态作为龙门式制坨机的备选控制策略。
22.可选的,步骤3中所述的以表征为有效性的方式,依次对龙门式制坨机的备选控制策略进行判定,具体判定过程为:
23.龙门式制坨机的备选控制策略包括:以第一分析内容、第二分析内容而分别形成的单一龙门式制坨机的备选控制策略,与以第一分析内容、第二分析内容而结合形成的两者结合龙门式制坨机的备选控制策略,且各个所述备选控制策略包括有多种;
24.依次对单一龙门式制坨机的备选控制策略以及两者结合龙门式制坨机的备选控制策略进行有效性判断,若单一龙门式制坨机的备选控制策略的有效性不满足预期值,则筛除;若两者结合龙门式制坨机的备选控制策略的有效性不满足预期值,则筛除;反之,则分别以有效性从大到小进行排序,结合而形成序列。
25.可选的,龙门式制坨机的工作负载具体为:结合二氧化硅液体的沉积速度、龙门式制坨机的负荷重量以及龙门式制坨机在设定工作温度下的负载强度而形成。
26.可选的,步骤1中所述的汇聚的二氧化硅液体以设定速度在龙门式制坨机内均匀沉积,或按序列对汇聚的二氧化硅液体进行划分,以设定时长的间隔依次将划分后的二氧化硅液体在龙门式制坨机内均匀沉积。
27.本发明实施例的技术方案至少具有如下优点和有益效果:
28.本实施例所设计的应用于龙门式制坨机的熔石英坨制备方法,通过获取四氟化硅气体及龙门式制坨机的数据,经过分析、改造、判定、评估,获取龙门式制坨机的最优控制策
略以匹配控制龙门式制坨机完成二氧化硅液体沉积制备熔石英坨,避免了因工作负载影响龙门式制坨机的正常工作,同时避免了熔石英坨在制备过程中出现不均匀等情况,影响熔石英坨无法满足后续的应用及加工要求,造成经济损失;另外,本实施例还通过设计的二氧化硅液体的制备方法,基于四氟化硅气体的浓度匹配设定的环境进行融化,避免了二氧化硅液体沉积为熔石英坨时出现气泡较多的情况。
附图说明
29.图1为本发明提供的一种应用于龙门式制坨机的熔石英坨制备方法的步骤流程示意图;
30.图2为本发明提供的二氧化硅液体制备方法的步骤流程示意图;
31.图3为本发明提供的龙门式制坨机的结构示意图;
32.图4为本发明提供的龙门式制坨机的摆动系统的局部结构示意图;
33.附图说明:1、龙门机架;2、升降系统;3、摆动系统;4、旋转系统;5、沉积基础杆夹持装置;6、沉积基础杆。
具体实施方式
34.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
35.如图1所示,本发明提供了其中一种实施例:一种应用于龙门式制坨机的熔石英坨制备方法,该方法的步骤包括:
36.步骤1:采集待输入的四氟化硅气体,并以特定方法与四氟化硅气体燃烧,汇聚燃烧形成的二氧化硅液体,使其通过以设定速度至龙门式制坨机内均匀摊开、沉积;
37.步骤2:采集龙门式制坨机的状态数据,分别对四氟化硅气体与龙门式制坨机的状态数据进行分析,并基于第一分析内容与第二分析内容对龙门式制坨机进行相应改造,以表征龙门式制坨机的备选控制策略;
38.步骤3:以表征为有效性的方式,依次对龙门式制坨机的备选控制策略进行判定,筛除单一有效性不满足预期值的备选控制策略以及两者结合有效性不满足预期值的备选控制策略,并以有效性从大到小的序列依次带入龙门式制坨机的工作负载进行评估,以最优值为评估结果,输出龙门式制坨机最优控制策略,以龙门式制坨机最优控制策略控制龙门式制坨机,带动龙门式制坨机内的二氧化硅液体做设定轨迹运动、沉积,直至完成熔石英坨的制备。
39.在本实施例的其中一种应用中,对四氟化硅气体的分析具体包括:四氟化硅气体的物理性质因素、四氟化硅气体的化学性质因素等数据,本实施例中所述的第一分析内容即对四氟化硅气体进行分析,以获取第一分析内容,从而实现通过第一分析内容对龙门式制坨机进行相应改造。
40.在本实施例的其中一种应用中,设定轨迹具体指以龙门式制坨机最优控制策略控制龙门式制坨机的升降速度、升降轨迹、摆动速度、摆动轨迹、旋转速度、旋转轨迹等达到最
优选,在避免了因工作负载影响龙门式制坨机的正常工作的同时,也避免了二氧化硅液体沉积形成熔石英坨的制备过程中出现不均匀等情况的发生。
41.在本实施例中,步骤1中所述的以特定方法与四氟化硅气体燃烧,特定方法具体为:在设定气体压强的环境中,通过氢气与氧气混合对四氟化硅气体以设定温度进行燃烧,直至达到设定时长,形成融化后的二氧化硅液体与氯化氢气体,之后氯化氢气体向上逸散、二氧化硅液体向下沉积,并汇聚二氧化硅液体,其中,设定气体压强、设定温度与设定时长具体根据待输入的四氟化硅气体进行获取并确定,以减少二氧化硅液体的气泡数。
42.如图2所示,在本实施例的其中一种应用中,还包括二氧化硅液体的制备方法,该方法的步骤包括:
43.1、识别四氟化硅气体的浓度;其中,该识别方法可通过建立四氟化硅浓度识别模型进行识别,本实施例提供了四氟化硅浓度识别模型的构造过程,具体为:采集不同浓度的四氟化硅气体,同时采集浓度为大于99%的四氟化硅气体,分别形成训练样本与测试样本,将训练样本输入至构造的四氟化硅浓度识别模型内进行计算,获取预测的四氟化硅气体浓度,以预测的四氟化硅气体浓度与测试样本进行差值计算,并通过差值迭代更新四氟化硅浓度识别模型,完成四氟化硅浓度识别模型的构造及训练。
44.2、基于四氟化硅气体的浓度,以相应方法与四氟化硅气体混合燃烧,其中,相应方法可以表征为设定相应的气体压强环境以及设定相应的燃烧温度环境。
45.3、以设定条件去判定形成二氧化硅液体时,可能会存在产生气泡的原因,以控制二氧化硅液体沉积制备熔石英坨中产生的气泡。其中,设定条件具体以可能存在产生气泡的原因进行确定,可能存在产生气泡的原因包括:燃烧温度、真空度、压强、湿度以及灰尘度等,基于上述条件依次进行判断,以减少二氧化硅液体沉积形成熔石英坨中产生的气泡。
46.4、完成待沉积的二氧化硅液体的制备。
47.如图3所示,在本实施例中,龙门式制坨机包括:龙门机架1、升降系统2、摆动系统3、旋转系统4、沉积基础杆夹持装置5、沉积基础杆6;升降系统2的两端分别安装在龙门机架1的两侧,摆动系统3安装在升降系统2的顶部中央,旋转系统4安装在摆动系统3的顶部中央,沉积基础杆夹持装置5的固定端安装在旋转系统4的顶部中央,沉积基础杆6的底部安装在沉积基础杆夹持装置5的夹持端内;
48.其中,升降系统2,用以带动沉积基础杆6做升降运动;
49.摆动系统3,用以带动沉积基础杆6做摆动运动;
50.旋转系统4,用以带动沉积基础杆6做旋转运动;
51.沉积基础杆夹持装置5,用以调整沉积基础杆6的姿态,并夹持固定沉积基础杆6;
52.沉积基础杆6,用以接收以设定速度均匀摊开、沉积的二氧化硅液体。
53.在本实施例的其中一个应用中,龙门机架1由支撑立柱、安装底板、横梁组成。支撑立柱与其对应的安装底板焊接为一体,通过底板上的安装孔固定在地面。横梁通过升降导轨安装在两侧的支撑立柱上,可由升降系统2驱动沿支撑立柱上下滑动。
54.在本实施例的其中一个应用中,升降系统2由两组伺服电机、精密减速机、传动丝杠、传动螺母和升降导轨组成,分别安装在龙门机架1两侧的支撑立柱上。伺服电机及精密减速机作为驱动,通过丝杠螺母传动,使横梁沿升降导轨上下滑动。升降导轨使用负荷型滚珠线性滑轨,横梁沿着导轨做高精度线性运动,能够实现运动的μm级的进给及定位;并且龙
门机架1两侧升降运动的同步性,由同步控制器所实现,同步控制器实时读取主机与从机的位置信号,从而得出主机与从机的位置与速度差值,然后输出速度与转矩补偿指令,以达到主机与从机同步运行的效果。另外,升降系统2的伺服电机具有电磁抱闸制动功能,在意外断电情况下,电磁抱闸线圈失电,使制动器的闸瓦紧紧抱住闸轮,电动机被制动停转,运动停止,防止横梁坠落,提高了其安全性。
55.如图4所示,在本实施例的其中一个应用中,摆动系统3由伺服电机、精密减速机、传动丝杠、传动螺母、摆动导轨和摆动平台组成,安装在龙门机架1的横梁上。伺服电机及精密减速机作为驱动,通过丝杠螺母传动,使摆动平台沿摆动导轨滑动。摆动导轨使用负荷型滚珠线性滑轨,横梁沿着导轨做高精度线性运动,能够实现运动的μm级的进给及定位。
56.在本实施例的其中一个应用中,旋转系统由伺服电机、蜗轮蜗杆回转盘组成,蜗轮蜗杆回转盘固定在摆动平台上。伺服电机作为驱动,通过蜗轮蜗杆回转盘,带动上方的沉积基础杆夹持装置5绕轴线旋转;其中,蜗轮蜗杆回转盘具有高负载能力,能够在设定负荷下,实现高精度旋转。另外,蜗轮蜗杆回转盘能同时承受径向静载荷≥945kn,径向动载荷≥470kn,轴向静载荷≥2360kn,轴向动载荷≥590kn和倾覆力矩≥270kn.m。
57.在本实施例的其中一个应用中,沉积基础杆夹持装置5固定旋转系统4的蜗轮蜗杆回转盘上,用于夹持沉积基础杆,使沉积基础杆6按照龙门式制坨机的最优控制策略进行升降、摆动和旋转。沉积基础杆夹持装置5由夹持装置底座、夹爪及调节块组成。夹持装置底座固定在旋转系统的蜗轮蜗杆回转盘上;底座上方沿圆周均布多个夹爪,用于沉积基础杆6的夹紧;调节块通过螺杆与夹爪连接,旋转螺杆调整调节块的进给量。夹爪上的调节块前端为v形,能够适应不同直径的沉积基础杆。通过各个方位调节块进给量的调节,可调整沉积基础杆的姿态,使基础杆与水平面的垂直度能够达到设定需求。
58.在本实施例中,龙门式制坨机的状态数据具体包括龙门式制坨机的工作姿态、龙门式制坨机的负荷重量以及龙门式制坨机的工作温度;
59.其中,龙门式制坨机的状态分析具体为:
60.将龙门式制坨机的工作姿态、龙门式制坨机的负荷重量以及龙门式制坨机的工作温度输入至ansys workbench仿真模块内进行计算,基于计算结果以获取即步骤2中所述的第二分析内容。
61.在本实施例中,通过将龙门式制坨机的工作姿态、龙门式制坨机的负荷重量以及龙门式制坨机的工作温度导入至ansys workbench仿真模块对其进行龙门式制坨机热变形的仿真模拟,根据仿真模拟的结果获取第二分析内容,从而实现对龙门式制坨机进行的改造。
62.在本实施例中,龙门式制坨机的工作姿态具体为:升降系统2的升降速度、摆动系统3的摆动程度以及摆动轨迹、旋转系统4的旋转程度以及旋转运动轨迹;步骤2中所述的基于第一分析内容与第二分析内容对龙门式制坨机进行相应改造,即基于第一分析内容与第二分析内容对龙门式制坨机的工作姿态分别或结合进行改造,使得龙门式制坨机以改造后的多种工作姿态作为龙门式制坨机的备选控制策略。
63.在本实施例中,步骤3中所述的以表征为有效性的方式,依次对龙门式制坨机的备选控制策略进行判定,具体判定过程为:
64.龙门式制坨机的备选控制策略包括:以第一分析内容、第二分析内容而分别形成
的单一龙门式制坨机的备选控制策略,与以第一分析内容、第二分析内容而结合形成的两者结合龙门式制坨机的备选控制策略,且各个所述备选控制策略包括有多种;
65.依次对单一龙门式制坨机的备选控制策略以及两者结合龙门式制坨机的备选控制策略进行有效性判断,若单一龙门式制坨机的备选控制策略的有效性不满足预期值,则筛除;若两者结合龙门式制坨机的备选控制策略的有效性不满足预期值,则筛除;反之,则分别以有效性从大到小进行排序,结合而形成序列。
66.在本实施例的其中一个应用中,通常选用为两者结合的龙门式制坨机备选控制策略作为有效性判断而形成的序列依据;但在特定情况下,比如满足二者其一满足标准工况的条件或人工设定的相应情况下,可以选用单一龙门式制坨机的备选控制策略作为有效性判断而形成的序列依据,以达到满足该龙门式制坨机控制策略的实用性以及精确性。
67.在本实施例中,龙门式制坨机的工作负载具体为:结合二氧化硅液体的沉积速度、龙门式制坨机的负荷重量以及龙门式制坨机在设定工作温度下的负载强度而形成。
68.在本实施例的其中一个应用中,在有效性判定之后,将序列以有效性从大到小排列,并导入至龙门式制坨机的工作负载进行评估,更能体现龙门式制坨机在沉积二氧化硅液体制备熔石英坨时,其控制程度的精确性,避免单一最优或两者结合最优的备选控制策略无法满足此时龙门式制坨机的工作负载情况。
69.在本实施例中,其中,升降系统2中设置有同步控制模块,同步控制模块,用以实时获取升降系统2两端的位置信号,计算而获取升降系统2的两端位置关系及速度差值,输出速度及转矩指令,使得升降系统2的两端同步运行。
70.在本实施例中,其中,摆动系统3具体通过摆动导轨安装在升降系统2的顶部中央,摆动导轨具体为负荷型滚珠线性滑轨,用以带动摆动系统3做设定精度的线性运动。
71.在本实施例中,步骤1中所述的汇聚的二氧化硅液体以设定速度在龙门式制坨机内均匀摊开、沉积,或按序列对汇聚的二氧化硅液体进行划分,以设定时长的间隔依次将划分后的二氧化硅液体在龙门式制坨机内均匀摊开、沉积。
72.在本实施例的其中一个应用中,汇聚的二氧化硅液体以设定速度均匀在龙门式制坨机内摊开进行沉积,或按序列对汇聚的二氧化硅液体进行划分,以设定时长的间隔依次将划分后的二氧化硅液体至龙门式制坨机内摊开进行沉积,不仅获取二氧化硅液体的摊开速率以及沉积速度,更能因此而匹配最优龙门式制坨机的控制策略,提高了精确性。
73.综上所述,本实施例所设计的应用于龙门式制坨机的熔石英坨制备方法,通过获取四氟化硅气体及龙门式制坨机的数据,经过分析、改造、判定、评估,获取龙门式制坨机的最优控制策略以匹配控制龙门式制坨机完成二氧化硅液体沉积制备熔石英坨,避免了因工作负载影响龙门式制坨机的正常工作,同时避免了熔石英坨在制备过程中出现不均匀等情况,影响熔石英坨无法满足后续的应用要求,造成经济损失;另外,本实施例还通过设计的二氧化硅液体的制备方法,基于四氟化硅气体的浓度匹配设定的环境进行融化,避免了二氧化硅液体沉积为熔石英坨时出现气泡较多的情况。
74.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1