一种双层复合材料仿生运动行为驱动器的制备方法
本发明属于智能控制驱动器制备,尤其涉及一种双层复合材料仿生运动行为驱动器的制备方法。
背景技术:
1、驱动器由于在外界刺激下可以产生可逆的形状变换成为最有前途的一种仿生智能材料。由于其自身的特点使驱动器在在市场上具有非常广泛的应用,应用领域包括人造肌肉,开关和软体机器人等,其中具有双重刺激响应性的柔性智能驱动器在机械、生物医药、传感器、人工肌肉和机器人等领域具有巨大的应用潜力。
2、近年来,聚乙二醇因具有良好的水溶性,并与许多有机物组分有良好的相溶性,且具有优良的润滑性、保湿性、分散性、粘接性,可作为抗静电剂及柔软剂等使用,在化妆品、制药、化纤、橡胶、塑料、造纸、油漆、电镀、农药、金属加工及食品加工等行业中均有着极为广泛的应用。因此基于聚乙二醇制备水凝胶驱动器是一种趋势,也是一个非常热点。聚己内酯是一种无毒,线性可吸收的脂肪族半结晶聚酯,其具有生物可降解性、优异的机械性能以及较强的韧性,同时还显示出了与其他聚合物材料互溶的独特特性,比如与聚氯乙烯、聚碳酸酯和聚苯乙烯。同样地,到目前为止也没有基于异丙基丙烯酰胺、聚乙二醇和聚己内酯嵌段物来制备水凝胶驱动器。所以,本申请根据其各自的有效作用,发明了一种双层复合材料仿生运动行为驱动器。
技术实现思路
1、解决的技术问题:
2、针对现有技术的不足,本申请提供了一种双层复合材料仿生运动行为驱动器的制备方法,解决了目前存在的没有基于异丙基丙烯酰胺、聚乙二醇和聚己内酯嵌段物来制备水凝胶驱动器等难题。
3、技术方案:
4、为实现上述目的,本申请通过以下技术方案予以实现:
5、一种双层复合材料仿生运动行为驱动器的制备方法,包括以下步骤:
6、步骤a,制备丙烯酸酯改性聚乙二醇-聚己内酯嵌段物:将聚乙二醇、己内酯和辛酸亚锡依次加入三口烧瓶中,混合均匀后通氮气30分钟,然后将混合液在140℃氮气保护下保持搅拌反应24h,反应完后冷却后与甲基丙烯酸酐混合均匀后倒入单口烧瓶中后通氮气30分钟,然后将混合液在130℃保持搅拌反应7h,最后将产物放置在真空烘箱中烘干制得丙烯酸酯改性聚乙二醇-聚己内酯嵌段物;
7、步骤b,合成光驱动层:丙烯酸酯改性聚乙二醇-聚己内酯嵌段物、光热转化类单体、热引发剂和n,n-二甲基甲酰胺依次加入烧瓶中,超声15min后将混合液放置在65℃烘箱中反应1.5h,反应完后冷却制得产物用去离子水浸泡4h直到产物中的n,n-二甲基甲酰胺被水取代;
8、步骤c,制备温敏驱动层,从而制得双层复合材料仿生运动行为驱动器:称取异丙基丙烯酰胺、去离子水、光引发剂依次加入玻璃瓶中,混合均匀,将温度控制为25℃并搅拌溶解,然后将混合物倒入上述光驱动层表面并放入-20℃环境中冷冻至全部结晶,拿透明玻璃将上述全部结晶的样品表面封盖,在特定波长的uv光下通过光引发剂引发反应获得温敏驱动层,制得双层复合材料仿生运动行为驱动器。
9、优选的,所述丙烯酸酯改性聚乙二醇-聚己内酯嵌段物通式为:
10、其中a为10-20,b为10-20,c为5-10。
11、优选的,所述丙烯酸酯改性聚乙二醇-聚己内酯嵌段物由下述步骤和质量份数配比的原料制备而成:
12、步骤a:称取聚乙二醇、己内酯和辛酸亚锡依次加入三口烧瓶中,混合均匀后通氮气30分钟,然后将混合液在140℃氮气保护下保持搅拌反应24h,反应完后冷却制得产物a备用;所述聚乙二醇和己内酯质量份数配比为1:2,辛酸亚锡为聚乙二醇和己内酯总质量的0.5%。
13、步骤b:将产物a与甲基丙烯酸酐混合均匀后倒入单口烧瓶中后通氮气30分钟,然后将混合液在130℃保持搅拌反应7h,最后将产物放置在真空烘箱中烘干;所述产物a与甲基丙烯酸酐的质量份数配比为1:0.1。
14、优选的,所述光驱动层由下述步骤和质量份数配比的原料制备而成:
15、第一步:称取丙烯酸酯改性聚乙二醇-聚己内酯嵌段物、光热转化类单体、热引发剂和n,n-二甲基甲酰胺依次加入烧瓶中,超声15min后将混合液放置在65℃烘箱中反应1.5h,反应完后冷却制得产物a备用;所述丙烯酸酯改性聚乙二醇-聚己内酯嵌段物和光热类转化单体的质量份数配比为1:3,热引发剂和n,n-二甲基甲酰胺分别为聚乙二醇-聚己内酯嵌段物和光热类转化单体总质量的0.5%和700%;
16、第二步:将产物a用去离子水浸泡4h直到产物a中的n,n-二甲基甲酰胺被水取代光驱动层。
17、优选的,所述光热转化类单体为四氧化三铁纳米粒子和/或氧化石墨烯,所述热引发剂为过硫酸钾或过硫酸铵。
18、优选的,所述四氧化三铁纳米粒子和氧化石墨烯的质量份数配比为1:1。
19、优选的,所述温敏驱动层由下述步骤和质量份数配比的原料制备而成:
20、s1:称取异丙基丙烯酰胺、去离子水、光引发剂依次加入玻璃瓶中,混合均匀,将温度控制为25℃并搅拌溶解,然后将混合物倒入光驱动层表面并放入-20℃环境中冷冻至全部结晶;所述异丙基丙烯酰胺和去离子水的质量份数配比为1:5~8;光引发剂用量为异丙基丙烯酰胺质量的0.5~1%;
21、s2:拿透明玻璃将上述全部结晶的样品表面封盖并用uv灯对其光照,最终获得温敏驱动层,由以上步骤制备的温敏驱动层最终产品质量与理论质量之比计算产率为93%。
22、优选的,所述光引发剂为4-丙烯酰氧基二苯甲酮、4-二甲胺基-苯甲酸乙酯、2-羟基-2-甲基-1-苯基-1-丙酮、2,4,6(三甲基苯甲酰基)二苯基氧化膦中的一种或多种。
23、优选的,所述uv灯的uv光固化在波长365~390nm的紫外光下进行,固化时间为30~45min,uv辐射剂量为280~450mw/cm2。
24、本发明的原理是:基于异丙基丙烯酰胺、聚乙二醇和聚己内酯嵌段物来制备水凝胶驱动器,聚异丙基丙烯酰胺为一种温敏性聚合物,其状态可随温度的变化发生相转变,其次聚己内酯和聚乙二醇聚合物为一种形状记忆材料,可以通过光照进行光热转换控制其形变,从而实现仿生运动行为驱动器的制备。
25、有益效果:
26、本申请提供了一种双层复合材料仿生运动行为驱动器的制备方法,具备以下有益效果:
27、1、本发明的一种双层复合材料仿生运动行为驱动器具有快速响应性、可重复使用性以及优良的仿生运动能力。
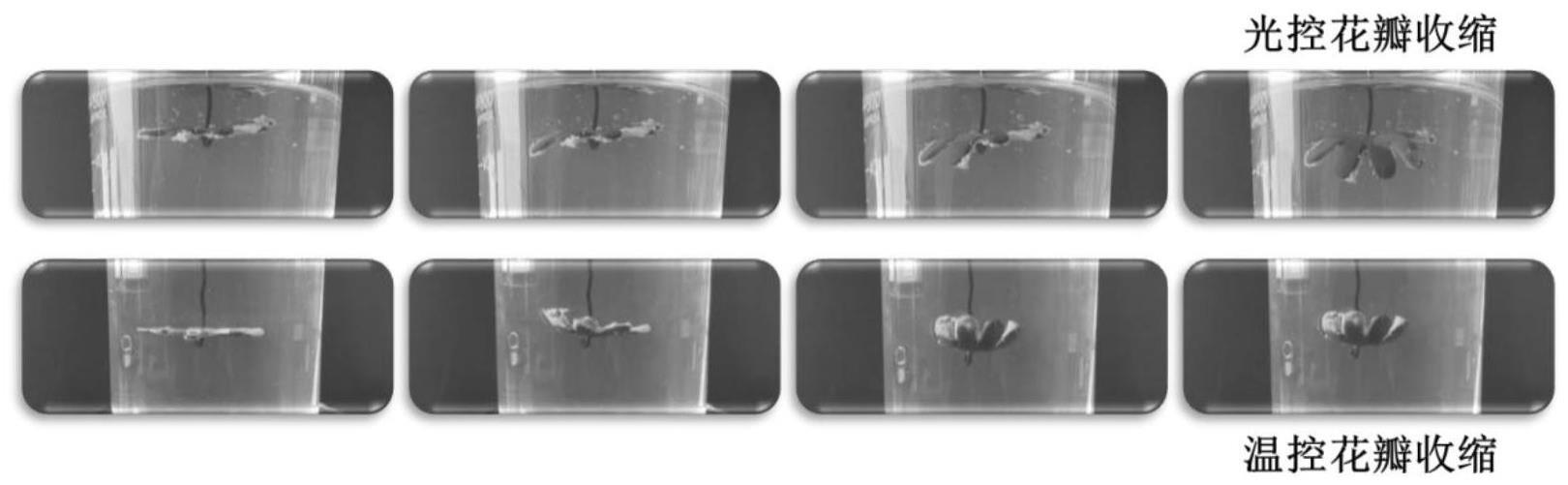
28、2、温度和光诱导复合材料模仿手掌夹持物品和手指手势展示以及模拟花朵盛开等,适用于组织工程、伤口定向治疗及电子皮肤传感等领域。
29、3、解决了普通驱动器单向驱动、不可重复使用、低响应速度等问题,为建造各种软体机器人和设备的实际仿生应用开辟了新道路。
技术特征:
1.一种双层复合材料仿生运动行为驱动器的制备方法,其特征在于,包括以下步骤:步骤a,制备丙烯酸酯改性聚乙二醇-聚己内酯嵌段物:将聚乙二醇、己内酯和辛酸亚锡依次加入三口烧瓶中,混合均匀后通氮气30分钟,然后将混合液在140℃氮气保护下保持搅拌反应24h,反应完后冷却后与甲基丙烯酸酐混合均匀后倒入单口烧瓶中后通氮气30分钟,然后将混合液在130℃保持搅拌反应7h,最后将产物放置在真空烘箱中烘干制得丙烯酸酯改性聚乙二醇-聚己内酯嵌段物;
2.根据权利要求1所述的双层复合材料仿生运动行为驱动器的制备方法,其特征在于:所述丙烯酸酯改性聚乙二醇-聚己内酯嵌段物通式为:
3.根据权利要求1所述双层复合材料仿生运动行为驱动器的制备方法,其特征在于,所述丙烯酸酯改性聚乙二醇-聚己内酯嵌段物由下述步骤和质量份数配比的原料制备而成:步骤a:称取聚乙二醇、己内酯和辛酸亚锡依次加入三口烧瓶中,混合均匀后通氮气30分钟,然后将混合液在140℃氮气保护下保持搅拌反应24h,反应完后冷却制得产物a备用;所述聚乙二醇和己内酯质量份数配比为1:2,辛酸亚锡为聚乙二醇和己内酯总质量的0.5%。步骤b:将产物a与甲基丙烯酸酐混合均匀后倒入单口烧瓶中后通氮气30分钟,然后将混合液在130℃保持搅拌反应7h,最后将产物放置在真空烘箱中烘干;所述产物a与甲基丙烯酸酐的质量份数配比为1:0.1。
4.根据权利要求1所述的双层复合材料仿生运动行为驱动器的制备方法,其特征在于:所述光驱动层由下述步骤和质量份数配比的原料制备而成:
5.根据权利要求4所述的双层复合材料仿生运动行为驱动器的制备方法,其特征在于:所述光热转化类单体为四氧化三铁纳米粒子和/或氧化石墨烯,所述热引发剂为过硫酸钾或过硫酸铵。
6.根据权利要求5所述的双层复合材料仿生运动行为驱动器的制备方法,其特征在于:所述四氧化三铁纳米粒子和氧化石墨烯的质量份数配比为1:1。
7.根据权利要求1-6任一所述双层复合材料仿生运动行为驱动器的制备方法,其特征在于:所述温敏驱动层由下述步骤和质量份数配比的原料制备而成:
8.根据权利要求7所述双层复合材料仿生运动行为驱动器的制备方法,其特征在于:所述光引发剂为4-丙烯酰氧基二苯甲酮、4-二甲胺基-苯甲酸乙酯、2-羟基-2-甲基-1-苯基-1-丙酮、2,4,6(三甲基苯甲酰基)二苯基氧化膦中的一种或多种。
9.根据权利要求7所述双层复合材料仿生运动行为驱动器的制备方法,其特征在于:所述uv灯的uv光固化在波长365~390nm的紫外光下进行,固化时间为30~45min,uv辐射剂量为280~450mw/cm2。
技术总结
本申请公开了一种双层复合材料仿生运动行为驱动器的制备方法,采用温敏驱动层和光驱动层组成,其中温敏驱动层选用异丙基丙烯酰胺单体和光引发剂在特定波长的UV光下通过光引发剂引发反应而成;光驱动层选用丙烯酸酯改性聚乙二醇‑聚己内酯嵌段物和光热转化类单体在有机溶剂中采用热反应而成;本申请双层复合材料仿生运动行为驱动器具有快速响应性、可重复使用性以及优良的仿生运动能力,包括:温度和光诱导复合材料模仿手掌夹持物品和手指手势展示以及模拟花朵盛开等,适用于组织工程、伤口定向治疗及电子皮肤传感等领域,解决了普通驱动器单向驱动、不可重复使用、低响应速度等问题,为建造各种软体机器人和设备的实际仿生应用开辟了新道路。
技术研发人员:张晓勇,丁昊然,丁国新,朱杏杏
受保护的技术使用者:安徽理工大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!