车辆行为控制装置和车辆行为控制方法与流程
1.本发明涉及一种车辆的车辆行为控制装置和车辆行为控制方法,该车辆具有1个前轮驱动马达和制动装置,其中,1个所述前轮驱动马达用于驱动左右两个驱动轮;所述制动装置用于对各车轮独立施加制动力。
背景技术:
2.在日本发明专利授权公报特许第3214141号中公开一种制动力控制装置,该制动力控制装置通过在车辆的各车轮上配置的制动机构来使左右车轮产生驱动扭矩差,据此控制车辆行为。
技术实现要素:
3.期望车辆行为的稳定性进一步提高。
4.本发明是为了解决上述问题而完成的,其目的在于,提供一种能够提高车辆行为稳定性的车辆行为控制装置和车辆行为控制方法。
5.本发明的第1技术方案是一种车辆的行为控制装置,所述车辆具有1个驱动马达和制动装置,其中,1个所述驱动马达用于驱动左右两个驱动轮;所述制动装置对每个驱动轮独立施加制动扭矩,该车辆的行为控制装置具有请求驱动扭矩获取部、目标偏航角速率设定部、目标驱动扭矩差设定部、驱动马达控制部和制动装置控制部,其中,所述请求驱动扭矩获取部获取所述车辆的请求驱动扭矩;所述目标偏航角速率设定部设定所述车辆的目标偏航角速率;所述目标驱动扭矩差设定部根据所述目标偏航角速率来设定左右的所述驱动轮的目标驱动扭矩差;所述驱动马达控制部控制所述驱动马达以使其输出合计的驱动扭矩,其中,所述合计的驱动扭矩是指对与所述请求驱动扭矩相对应的驱动扭矩和与所述目标驱动扭矩差相对应的驱动扭矩进行合计后的驱动扭矩;所述制动装置控制部控制所述制动装置以使其对左右的所述驱动轮中的一方施加与所述目标驱动扭矩差相对应的制动扭矩。
6.本发明的第2技术方案是一种车辆的行为控制方法,其中所述车辆具有1个驱动马达和制动装置,其中,1个所述驱动马达用于驱动左右两个驱动轮;所述制动装置对每个驱动轮独立施加制动扭矩,所述车辆的行为控制方法具有请求驱动扭矩获取步骤、目标偏航角速率设定步骤、目标驱动扭矩差设定步骤、驱动马达控制步骤和制动装置控制步骤,其中,在所述请求驱动扭矩获取步骤中,获取所述车辆的请求驱动扭矩;在所述目标偏航角速率设定步骤中,设定所述车辆的目标偏航角速;在所述目标驱动扭矩差设定步骤中,根据所述目标偏航角速率来设定左右的所述驱动轮的目标驱动扭矩差;在所述驱动马达控制步骤中,控制所述驱动马达以使其输出合计的驱动扭矩的步骤,其中,所述合计的驱动扭矩是指对与所述请求驱动扭矩相对应的驱动扭矩和与所述目标驱动扭矩差相对应的驱动扭矩进行合计后的驱动扭矩;在所述制动装置控制步骤中,控制所述制动装置以使其对左右的所述驱动轮中的一方施加与所述目标驱动扭矩差相对应的制动扭矩。
7.本发明的车辆行为控制装置和车辆行为控制方法能够提高车辆行为稳定性。
8.根据参照附图对以下实施方式进行的说明,上述的目的、特征和优点应易于被理解。
附图说明
9.图1是电动车辆的示意图。图2是行为控制装置的框图。图3是说明使车轮产生左右驱动扭矩差的方法的示意图。图4是表示行为控制处理的流程的流程图。
具体实施方式
10.〔第1实施方式〕[电动车辆的结构]图1是电动车辆10的示意图。电动车辆10相当于本发明的车辆。本实施方式的电动车辆10具有:前轮驱动马达14,其驱动左前轮12fl和右前轮12fr;后轮驱动马达16,其驱动左后轮12rl和右后轮12rr;和行为控制装置22,其控制前轮驱动马达14和后轮驱动马达16。
[0011]
从前轮驱动马达14输出的驱动扭矩被平均地分配给左前轮12fl和右前轮12fr。从后轮驱动马达16输出的驱动扭矩被平均地分配给左后轮12rl和右后轮12rr。前轮驱动马达14和后轮驱动马达16分别相当于本发明的驱动马达。
[0012]
下面,当不区别左前轮12fl、右前轮12fr、左后轮12rl和右后轮12rr时,有时记载为车轮12。另外,当不区别左前轮12fl和右前轮12fr时,有时记载为前轮12f,当不区别左后轮12rl和右后轮12rr时,有时记载为后轮12r。
[0013]
在各车轮12上设置有液压制动器18fl、18fr、18rl、18rr。液压制动器18fl、18fr、18rl、18rr对各车轮12独立施加制动扭矩。下面,当不区别液压制动器18fl、18fr、18rl、18rr时,有时记载为液压制动器18。通过液压控制单元20来控制由各液压制动器18对各车轮12施加的制动扭矩。液压制动器18相当于本发明的制动装置。
[0014]
由行为控制装置22控制前轮驱动马达14、后轮驱动马达16和液压控制单元20。
[0015]
作为传感器类,电动车辆10上设置有车轮速度传感器24fl、24fr、24rl、24rr、操舵角传感器26、偏航角速率传感器28和加速踏板开度传感器30。
[0016]
车轮速度传感器24fl、24fr、24rl、24rr检测各车轮12的车轮速度。下面,当不区别车轮速度传感器24fl、24fr、24rl、24rr时,有时记载为车轮速度传感器24。
[0017]
操舵角传感器26检测方向盘32的操舵角。偏航角速率传感器28检测电动车辆10绕重心的偏航角速率(yaw rate)。加速踏板开度传感器30检测未图示的加速踏板的踩踏量(加速踏板开度)。
[0018]
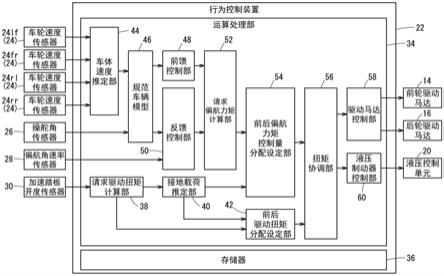
[行为控制装置的结构]图2是行为控制装置22的框图。行为控制装置22具有运算处理装置34和存储器36。运算处理装置34具有未图示的cpu等处理器、ram等存储介质。存储器36是非暂时性有形的计算机可读存储介质。
[0019]
行为控制装置22以输出与驾驶员的请求驱动扭矩t相对应的驱动扭矩的方式来控
制前轮驱动马达14和后轮驱动马达16。行为控制装置22以使前轮12f和后轮12r产生与目标偏航角速率相对应的偏航力矩(yaw moment)的方式来控制前轮驱动马达14、后轮驱动马达16和液压控制单元20。
[0020]
行为控制装置22具有请求驱动扭矩计算部38、接地载荷推定部40、前后驱动扭矩分配设定部42、车体速度推定部44、规范车辆模型46、前馈控制部48、反馈控制部50、请求偏航力矩计算部52、前后偏航力矩控制量分配设定部54、扭矩协调部56、驱动马达控制部58和液压制动器控制部60。
[0021]
请求驱动扭矩计算部38、接地载荷推定部40、前后驱动扭矩分配设定部42、车体速度推定部44、规范车辆模型46、前馈控制部48、反馈控制部50、请求偏航力矩计算部52、前后偏航力矩控制量分配设定部54、扭矩协调部56、驱动马达控制部58和液压制动器控制部60通过在运算处理装置34的处理器中执行存储在存储器36中的程序来执行。
[0022]
请求驱动扭矩计算部38计算驾驶员的请求驱动扭矩t。请求驱动扭矩t根据由加速踏板开度传感器30检测到的加速踏板开度来计算。请求驱动扭矩计算部38相当于本发明的请求驱动扭矩获取部。
[0023]
接地载荷推定部40推定前轮12f的接地载荷和后轮12r的接地载荷。接地载荷根据由请求驱动扭矩计算部38计算出的请求驱动扭矩t来推定。
[0024]
前后驱动扭矩分配设定部42设定前轮驱动马达14输出的目标驱动扭矩tf和后轮驱动马达16输出的目标驱动扭矩tr。目标驱动扭矩tf和目标驱动扭矩tr满足下式的条件,同时根据前轮12f的接地载荷和后轮12r的接地载荷来设定。
[0025]
t=tf+tr车体速度推定部44推定电动车辆10的车体速度。车体速度根据各车轮速度传感器24检测到的各车轮12的车轮速度来推定。
[0026]
规范车辆模型46计算目标偏航角速率。目标偏航角速率使用车辆模型来计算,该车辆模型被输入了由车体速度推定部44推定出的车体速度和由操舵角传感器26检测到的操舵角。规范车辆模型46相当于本发明的目标偏航角速率设定部。
[0027]
前馈控制部48设定前馈请求偏航力矩(以下称为ff请求偏航力矩)。ff请求偏航力矩根据由规范车辆模型46计算出的目标偏航角速率来设定。
[0028]
反馈控制部50设定反馈请求偏航力矩(以下称为fb请求偏航力矩)。fb请求偏航力矩根据目标偏航角速率与偏航角速率(以下称为实际偏航角速率)的差来设定,其中,所述目标偏航角速率是由规范车辆模型46计算出的;所述偏航角速率是由偏航角速率传感器28检测到的。
[0029]
请求偏航力矩计算部52计算请求偏航力矩m。根据由前馈控制部48设定的ff请求偏航力矩和由反馈控制部50设定的fb请求偏航力矩来计算请求偏航力矩m。
[0030]
前后偏航力矩控制量分配设定部54设定左右前轮12f之间的目标驱动扭矩差δtwf、左右后轮12r之间的目标驱动扭矩差δtwr。前后偏航力矩控制量分配设定部54根据由接地载荷推定部40推定出的前轮12f的接地载荷和后轮12r的接地载荷,来设定在前轮12f侧产生的偏航力矩mf和在后轮12r侧产生的偏航力矩mr。目标驱动扭矩差δtwf根据偏航力矩mf来设定,目标驱动扭矩差δtwr根据偏航力矩mr来设定。前后偏航力矩控制量分配设定部54相当于本发明的目标驱动扭矩差设定部。
[0031]
扭矩协调部56设定最终的前轮驱动马达14的目标驱动扭矩tf*、后轮驱动马达16的目标驱动扭矩tr*、各车轮12的目标制动扭矩。前轮驱动马达14的目标驱动扭矩tf*、后轮驱动马达16的目标驱动扭矩tr*、各车轮12的目标制动扭矩被设定为,实现由前后驱动扭矩分配设定部42设定的目标驱动扭矩tf和目标驱动扭矩tr、以及由前后偏航力矩控制量分配设定部54设定的目标驱动扭矩差δtwf和目标驱动扭矩差δtwr。
[0032]
图3是说明使车轮12产生左右驱动扭矩差的方法的示意图。如前述那样,从前轮驱动马达14输出的驱动扭矩被平均地分配给左前轮12fl和右前轮12fr。另外,从后轮驱动马达16输出的驱动扭矩被平均地分配给左后轮12rl和右后轮12rr。
[0033]
例如,在为了在前轮12f产生右转的偏航力矩而使左右前轮12f产生目标驱动扭矩差δtwf的情况下,使前轮驱动马达14的驱动扭矩增加δtf,使左前轮12fl的驱动扭矩和右前轮12fr的驱动扭矩均增加δtwf/2。并且,通过液压制动器18fr产生δtwf的对右前轮12fr的制动扭矩。据此,在右前轮12fr,驱动扭矩减少δtwf/2。因此,能够通过左前轮12fl的驱动扭矩的增加量δtwf/2和右前轮12fr的驱动扭矩的减少量δtwf/2,使左右前轮12f产生目标驱动扭矩差δtwf。
[0034]
另外,在为了在后轮12r产生右转的偏航力矩而使左右后轮12r产生目标驱动扭矩差δtwr的情况下,使后轮驱动马达16的驱动扭矩增加δtr,使左后轮12rl和右后轮12rr的驱动扭矩增加δtwr/2。并且,通过液压制动器18rr产生δtwr的对右后轮12rr的制动扭矩。据此,右后轮12rr的驱动扭矩减少δtwr/2。因此,能够通过左后轮12rl的驱动扭矩的增加量δtwr/2和右后轮12rr的驱动扭矩的减少量δtwr/2,使左右后轮12r产生目标驱动扭矩差δtwr。
[0035]
另外,前轮驱动马达14的驱动扭矩增加量δtf和后轮驱动马达16的驱动扭矩增加量δtr能够通过下式求得。δtf=δtwf
×
rf
×
gf/ηfδtr=δtwr
×
rr
×
gr/ηr
[0036]
在此,rf表示前轮12f的半径,rr表示后轮12r的半径,gf表示从前轮驱动马达14到前轮12f的传动比(gear ratio),gr表示从后轮驱动马达16到后轮12r的传动比,ηf表示前轮驱动马达14的效率,ηr表示后轮驱动马达16的效率。
[0037]
因此,最终的前轮驱动马达14的目标驱动扭矩tf*、后轮驱动马达16的目标驱动扭矩tr*能够由下式求得。tf*=tf+δtftr*=tr+δtr
[0038]
根据产生偏航力矩的方向、左右前轮12f产生的目标驱动扭矩差δtwf、和左右后轮12r产生的目标驱动扭矩差δtwr来设定各车轮12的目标制动扭矩。具体而言,内轮侧的前轮12f的目标制动扭矩被设定为-δtwf,外轮侧的前轮12f的目标制动扭矩被设定为零,内轮侧的后轮12r的目标制动扭矩被设定为-δtwr,外轮侧的后轮12r的目标制动扭矩被设定为零。
[0039]
驱动马达控制部58以使前轮驱动马达14输出的驱动扭矩成为目标驱动扭矩tf*的方式来控制前轮驱动马达14,并且以使后轮驱动马达16输出的驱动扭矩成为目标驱动扭矩tr*的方式来控制后轮驱动马达16。
[0040]
液压制动器控制部60以使在各车轮12产生的制动扭矩成为目标制动扭矩的方式来控制液压控制单元20。液压制动器控制部60相当于本发明的制动装置控制部。
[0041]
[驱动马达控制处理]图4是表示在行为控制装置22中执行的行为控制处理的流程的流程图。当电动车辆10的起动开关处于接通状态时,行为控制处理按规定的周期反复执行。
[0042]
在步骤s1中,请求驱动扭矩计算部38计算请求驱动扭矩t,然后向步骤s2转移。请求驱动扭矩t根据由加速踏板开度传感器30检测到的加速踏板开度来进行计算。
[0043]
在步骤s2中,接地载荷推定部40推定前轮12f的接地载荷和后轮12r的接地载荷,然后转移到步骤s3。前轮12f的接地载荷和后轮12r的接地载荷根据由请求驱动扭矩计算部38计算出的请求驱动扭矩来推定。
[0044]
在步骤s3中,前后驱动扭矩分配设定部42设定前轮驱动马达14的目标驱动扭矩tf和后轮驱动马达16的目标驱动扭矩tr,然后向步骤s4转移。前轮驱动马达14的目标驱动扭矩tf和后轮驱动马达16的目标驱动扭矩tr根据由请求驱动扭矩计算部38计算出的请求驱动扭矩t、由接地载荷推定部40推定出的前轮12f的接地载荷和后轮12r的接地载荷来设定。
[0045]
在步骤s4中,车体速度推定部44推定电动车辆10的车体速度,然后向步骤s5转移。车体速度根据由车轮速度传感器24检测到的各车轮12的车轮速度来推定。
[0046]
在步骤s5中,规范车辆模型46计算目标偏航角速率,然后向步骤s6转移。目标偏航角速率根据车辆模型来计算,该车辆模型被输入了由车体速度推定部44推定出的车体速度、和由操舵角传感器26检测到的操舵角。
[0047]
在步骤s6中,前馈控制部48设定ff请求偏航力矩,然后向步骤s7转移。ff请求偏航力矩根据由规范车辆模型46计算出的目标偏航角速率来设定。
[0048]
在步骤s7中,反馈控制部50设定fb请求偏航力矩,然后向步骤s8转移。fb请求偏航力矩根据由规范车辆模型46计算出的目标偏航角速率、和由偏航角速率传感器28检测到的实际偏航角速率来设定。
[0049]
在步骤s8中,请求偏航力矩计算部52计算请求偏航力矩m,然后向步骤s9转移。请求偏航力矩m根据ff请求偏航力矩和fb请求偏航力矩来计算。
[0050]
在步骤s9中,前后偏航力矩控制量分配设定部54设定左右前轮12f的目标驱动扭矩差δtwf、左右后轮12r的目标驱动扭矩差δtwr,然后向步骤s10转移。前后偏航力矩控制量分配设定部54根据由接地载荷推定部40推定出的前轮12f的接地载荷和后轮12r的接地载荷、由请求偏航力矩计算部52计算出的请求偏航力矩m,来设定在前轮12f侧产生的偏航力矩mf和在后轮12r侧产生的偏航力矩mr。目标驱动扭矩差δtwf根据偏航力矩mf来设定,目标驱动扭矩差δtwr根据偏航力矩mr来设定。
[0051]
在步骤s10中,扭矩协调部56设定前轮驱动马达14的目标驱动扭矩tf*、后轮驱动马达16的目标驱动扭矩tr*和各车轮12的目标制动扭矩,然后向步骤s11转移。前轮驱动马达14的目标驱动扭矩tf*、后轮驱动马达16的目标驱动扭矩tr*和各车轮12的目标制动扭矩根据目标驱动扭矩tf和目标驱动扭矩tr、以及目标驱动扭矩差δtwf和目标驱动扭矩差δtwr来设定,其中,所述目标驱动扭矩tf和所述目标驱动扭矩tr是根据请求驱动扭矩t设定的;所述目标驱动扭矩差δtwf和目标驱动扭矩差δtwr是根据请求偏航力矩m设定的。
[0052]
在步骤s11中,驱动马达控制部58控制前轮驱动马达14和后轮驱动马达16,液压制
动器控制部60控制液压控制单元20,结束行为控制处理。前轮驱动马达14以使输出的驱动扭矩成为目标驱动扭矩tf*的方式进行控制。后轮驱动马达16以使输出的驱动扭矩成为目标驱动扭矩tr*的方式进行控制。液压控制单元20以使在各车轮12产生的制动扭矩成为目标制动扭矩的方式来进行控制。
[0053]
[作用效果]例如,为了向左前轮12fl和右前轮12fr分配不同的驱动扭矩,需要对左前轮12fl和右前轮12fr分别设置驱动马达,或者设置驱动力分配机构。因此,为了使电动车辆10具有左右驱动扭矩分配功能,需要花费很大的成本。
[0054]
左前轮12fl与右前轮12fr之间的驱动扭矩差的产生能够通过由液压制动器18对左前轮12fl和右前轮12fr中的一方施加制动扭矩来实现。但是,为了增大左右前轮12f的驱动扭矩差,需要增大制动扭矩,从而减速度变大,因此有给成员带来不适感的担忧。另一方面,即使以不会给乘员带来不适感的程度来施加制动扭矩,也无法增大左右前轮12f的驱动扭矩差,在前轮12f产生的偏航力矩变小,因此,有无法充分地实现车辆的行为稳定化的担忧。
[0055]
在使左后轮12rl与右后轮12rr之间产生驱动扭矩差的情况下,也产生与上述同样的问题。
[0056]
因此,在本实施方式的电动车辆10中,根据目标驱动扭矩tf和目标驱动扭矩tr、及目标驱动扭矩差δtwf和目标驱动扭矩差δtwr来设定最终的前轮驱动马达14的目标驱动扭矩tf*、后轮驱动马达16的目标驱动扭矩tr*和各车轮12的目标制动扭矩,其中,所述目标驱动扭矩tf和所述目标驱动扭矩tr是根据请求驱动扭矩t设定的;所述目标驱动扭矩差δtwf和目标驱动扭矩差δtwr是根据请求偏航力矩m设定的。
[0057]
更具体而言,在本实施方式的电动车辆10中,设目标驱动扭矩tf和前轮驱动马达14的驱动扭矩增加量δtf的合计为最终的前轮驱动马达14的目标驱动扭矩tf*,其中所述前轮驱动马达14的驱动扭矩增加量δtf根据目标驱动扭矩差δtwf求得。另外,在本实施方式的电动车辆10中,设目标驱动扭矩tr与后轮驱动马达16的驱动扭矩增加量δtr的合计为最终的后轮驱动马达16的目标驱动扭矩tr*,所述后轮驱动马达16的驱动扭矩增加量δtr根据目标驱动扭矩差δtwr求得。并且,在本实施方式的电动车辆10中,将内轮侧的前轮12f的目标制动扭矩设定为-δtwf,将外轮侧的前轮12f的目标制动扭矩设定为零,将内轮侧的后轮12r的目标制动扭矩设定为-δtwr,将外轮侧的后轮12r的目标制动扭矩设定为零。
[0058]
据此,能够不对电动车辆10设置驱动力分配机构或者不使电动车辆10产生减速度,而使左右前轮12f和左右后轮12r分别产生驱动扭矩差。因此,能够抑制使电动车辆10具有左右驱动扭矩分配功能所需的成本,能够不给乘员带来不适感而充分实现车辆的行为稳定化。
[0058]
〔根据实施方式能得到的技术思想〕下面记载根据上述实施方式能掌握的技术思想。
[0060]
一种车辆(10)的行为控制装置(22),所述车辆(10)具有1个驱动马达(14、16)和制动装置(18),其中,1个所述驱动马达(14、16)用于驱动左右两个驱动轮(12);所述制动装置(18)对每个所述驱动轮独立施加制动扭矩,所述车辆(10)的所述行为控制装置(22)具有请求驱动扭矩获取部(38)、目标偏航角速率设定部(46)、目标驱动扭矩差设定部(54)、驱动马
达控制部(58)、制动装置控制部(60),其中,所述请求驱动扭矩获取部(38)获取所述车辆的请求驱动扭矩;所述目标偏航角速率设定部(46)设定所述车辆的目标偏航角速率;所述目标驱动扭矩差设定部(54)根据所述目标偏航角速率来设定左右的所述驱动轮之间的目标驱动扭矩差;驱动马达控制部(58)控制所述驱动马达以使其输出合计的驱动扭矩,其中,所述合计的驱动扭矩是指对与所述请求驱动扭矩相对应的驱动扭矩和与所述目标驱动扭矩差相对应的驱动扭矩进行合计后的驱动扭矩;所述制动装置控制部(60)控制所述制动装置以使其对左右的所述驱动轮中的一方施加与所述目标驱动扭矩差相对应的制动扭矩。
[0061]
也可以为:在上述的行为控制装置中,所述车辆具有1个前轮驱动马达和1个后轮驱动马达,其中,1个所述前轮驱动马达用于驱动左右两个前轮;1个所述后轮驱动马达用于驱动左右两个后轮,所述行为控制装置具有请求驱动扭矩计算部和接地载荷推定部,其中,所述请求驱动扭矩计算部计算所述车辆的请求驱动扭矩;所述接地载荷推定部根据所述请求驱动扭矩来推定所述前轮的接地载荷和所述后轮的接地载荷,所述目标驱动扭矩差设定部根据所述目标偏航角速率和所述请求驱动扭矩来设定左右的所述前轮之间的目标驱动扭矩差和左右的所述后轮之间的目标驱动扭矩差。
[0062]
一种车辆(10)的行为控制方法,所述车辆(10)具有1个驱动马达(14、16)和制动装置(18),其中,1个所述驱动马达(14、16)用于驱动左右两个驱动轮(12);所述制动装置(18)对每个所述驱动轮独立施加制动扭矩,所述车辆(10)的行为控制方法具有请求驱动扭矩获取步骤、目标偏航角速率设定步骤、目标驱动扭矩差设定步骤、驱动马达控制步骤和制动装置控制步骤,其中,在所述请求驱动扭矩获取步骤中,获取所述车辆的请求驱动扭矩;在所述目标偏航角速率设定步骤中,设定所述车辆的目标偏航角速率;在所述目标驱动扭矩差设定步骤中,根据所述目标偏航角速率来设定左右的所述驱动轮的目标驱动扭矩差;在所述驱动马达控制步骤中,控制所述驱动马达以使其输出合计的驱动扭矩,其中,所述合计的驱动扭矩是指对与所述请求驱动扭矩相对应的驱动扭矩和与所述目标驱动扭矩差相对应的驱动扭矩进行合计后的驱动扭矩;在所述制动装置控制步骤中,控制所述制动装置以使其对左右的所述驱动轮中的一方施加与所述目标驱动扭矩差相对应的制动扭矩。
[0063]
在上述的行为控制方法中,所述车辆具有1个前轮驱动马达和1个后轮驱动马达,其中,1个所述前轮驱动马达用于驱动左右两个前轮;1个所述后轮驱动马达用于驱动左右两个后轮,所述行为控制方法具有请求驱动扭矩计算步骤和接地载荷推定步骤,其中,在所述请求驱动扭矩计算步骤中计算所述车辆的请求驱动扭矩;在所述接地载荷推定步骤中根据所述请求驱动扭矩来推定所述前轮的接地载荷和所述后轮的接地载荷,在所述目标驱动扭矩差设定步骤中,根据所述目标偏航角速率和所述请求驱动扭矩来设定左右的所述前轮的目标驱动扭矩差和左右的所述后轮的目标驱动扭矩差。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1