用于车辆运动规划和控制算法的方法和控制设备与流程
[0001]
该文档公开了一种控制设备和一种方法。更特别地,提供了一种控制设备和一种方法,用于对通过下方路段(诸如道路部段,停车场或类似的可驾驶表面)的自主车辆进行运动规划。
背景技术:
[0002]
自主系统(自动化车辆是其中的一部分)通常遵循感知规划控制体系。车辆上的传感器正确定车辆的环境的状态。规划模块负责为车辆寻找可遵循的车辆状态的序列。该序列可以是多维路径(例如,空间中的车辆状态的序列),也可以是轨迹(即,与速度曲线相关联的路径)。由规划模块生成的路径和轨迹定义车辆如何在环境中的移动。
[0003]
控制器然后负责将规划模块的此输出转换为致动命令。值得注意的是,控制器可以是规划模块的一部分,也可以是单独的模块。
[0004]
控制模块负责使自主车辆遵循由规划模块规划的状态的序列。为此,控制模块直接控制车辆的致动器,诸如转向,制动系统,发动机和变速箱。
[0005]
用于解决与规划和控制模块相关联的任务的算法通常需要大量计算。由于自主车辆通常缺乏可用的计算能力,并且被分配用于运算新运动的时间非常短(通常在50至500毫秒之间),这一事实使问题更加严重。
[0006]
文档wo2018091373描述了一种用于车辆的运动规划的方法。该文档指定了一种解决方案,其中针对运动规划器解决方案的初步猜测被存储在云/存储器中,并在驾驶时发送给车辆。这些初步猜测通过为它们提供可能的近似值来加快运动规划算法的速度。
[0007]
很多时候,此初步解决方案/猜测需要进一步优化。但是,该文档没有公开或建议可以如何进行进一步的优化和/或如何能够节省车辆的时间或计算资源。
[0008]
文档wo2017214581描述了车辆的在计算上的繁重运算的问题,并建议将已规划图存储在存储器中以供以后使用。通过对几个运动进行预先计算,然后可以将这些运动缝合在一起以形成运动规划,可以提高计算速度。
[0009]
然而,此方法有局限性,因为需要大量的计算机存储器才能存储航行期间需要驶过的所有道路的已预先计算的数量。
[0010]
文档us20180164822描述了一种用于减少与自主驾驶车辆的路线规划相关联的计算成本的方法。车辆运动规划在车上生成。该文档描述了有关如何加快计算时间的几种可能的选择,诸如重复使用在先前规划周期中计算出的解决方案以及执行解耦的横向和纵向规划。
[0011]
然而,已公开的方法可能仅提供非常有限的计算时间的节省。
[0012]
似乎需要进一步开发以在自主车辆的运动规划期间减少计算时间。
技术实现要素:
[0013]
因此,本发明的目的是解决上述问题中的至少一些并且改善自主车辆的轨迹规
划。
[0014]
根据本发明的第一方面,该目的通过一种用于对通过下方路段(诸如道路部段,通道,停车场或类似表面)的自主车辆进行运动规划的方法来实现。该方法包括在驶近下方路段时确定车辆的地理坐标,或在车辆驶近时确定下方路段的道路/车道/街道/停车标识符。该方法还包括获得与具有已提供的地理坐标或道路/车道/街道/停车标识符的下方路段相关联的已预先计算的过程。另外,该方法还包括基于已获得的已预先计算的过程来规划车辆在下方路段的通过期间的运动。
[0015]
根据本发明的第二方面,该目的通过一种控制设备来实现。控制设备的目的是对通过下方路段的自主车辆进行运动规划。控制设备被配置为在驶近下方路段时确定车辆的地理坐标,或在车辆驶近时确定下方路段的道路/车道/街道/停车标识符。此外,控制设备被配置为获得与具有已提供的地理坐标或道路/车道/街道/停车标识符的下方路段相关联的已预先计算的过程。控制设备还被配置为基于已获得的已预先计算的过程来规划车辆在下方路段的通过期间的运动。
[0016]
例如,与下方路段相关联的已预先计算的过程可以包括例如已预先计算的轨迹,已预先计算的路径,已预先计算的栅格(lattice),已预先计算的坡度,已预先计算的采样偏差,已预先计算的避障建议和/或已预先计算的加速/制动建议。
[0017]
由于一个或多个过程的预先计算和存储,可以减少用于执行运动规划和/或各种控制算法的运算所需的时间段。由此,减少了在车辆车载自主驾驶的任务中所需的计算量。
[0018]
根据随后的详细描述,其他优点和其他新颖特征将变得明显。
附图说明
[0019]
现在将参考附图进一步详细描述本发明的实施方式,其中:
[0020]
图1展示根据侧视图的车辆的实施方式;
[0021]
图2展示根据一实施方式的车辆的栅格和三个突出的运动基元(motion primitives)的实施方式;
[0022]
图3展示根据一实施方式的通过计算几个运动基元创建的栅格的实施方式,该运动基元可以连接沿着道路的一组离散状态;
[0023]
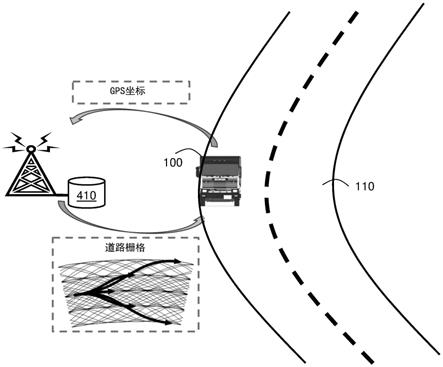
图4展示根据一实施方式的车辆的已规划的轨迹的实施方式;
[0024]
图5展示根据一实施方式的车辆内部;
[0025]
图6是展示该方法的实施方式的流程图;以及
[0026]
图7展示根据一实施方式的系统。
具体实施方式
[0027]
在此描述的本发明的实施方式被定义为控制设备和控制设备中的方法,其可以在以下描述的实施方式中付诸实践。然而,这些实施方式可以以许多不同的形式示例和实现,并且不限于在此阐述的实施例;本发明不限于所公开的实施方式。相反,提供实施方式的这些说明性实施例,使得本公开将是彻底和完整的。
[0028]
根据结合附图考虑的以下详细描述,其他目的和特征将变得明显。然而,应当理解,附图仅是出于说明的目的而设计的,而不是作为对本文公开的实施方式的限制的定义,
对此,将参考所附权利要求书。此外,附图不一定按比例绘制,并且除非另外指出,否则它们仅旨在概念性地示出本文所述的结构和过程。
[0029]
图1展示车辆100,其在下方路段110上沿驾驶方向105驾驶。车辆100可以包括广义上的运输工具,诸如卡车,汽车,摩托车,拖车,公共汽车,自行车,火车,电车,飞机,船只,无人水下航行器,无人驾驶飞机,人形服务机器人,航天器或在车轮,水,空气或类似介质上运行的其他类似载人或无人驾驶交通工具。
[0030]
在一些实施方式中,车辆100可以是自主的。
[0031]
下方路段110可以例如是道路部段,停车场,行车道,高速公路或车辆的类似可驾驶表面。
[0032]
车辆100包括控制设备120。控制设备120又可以包括例如一个或多个电子控制单元(ecu),通常是多个交互作用的ecu。控制设备120可以包括数字计算机,其基于例如从放置在车辆100的各个部分和不同部件中或甚至放置在车辆100外部的传感器读取的信息来控制车辆100的一个或多个电气系统或电气子系统。ecu是通常用于汽车电子设备中的通用术语,用于控制车辆100中的电气系统或子系统中的一个或多个的任何嵌入式系统。控制设备120可以被特别地配置为基于传感器输入来实施高度估计和距离测量,并且执行参数比较并基于已进行的比较的结果来做出决定。
[0033]
车辆100通常具有一个或多个向前,横向和/或向后指向的传感器130,以便收集用于执行自主驾驶的环境信息。
[0034]
传感器130可以在不同的实施方式中包括例如摄像头,立体摄像头,红外摄像头,视频摄像头,雷达,激光雷达,超声设备,飞行时间摄像头或类似装置。在一些实施方式中,车辆100可以包括多个传感器130,其可以是相同或不同种类的,诸如雷达和摄像头;激光雷达和雷达等。
[0035]
传感器130可以例如检测前方道路形状的各种指示器,诸如道路线,道路限制,前方车辆的位置等。
[0036]
自主驾驶应用要求已规划的轨迹具有高度的平滑度。根据本文的实施方式,车辆100的已成功运算出的路径或轨迹,或特征和方法,或在特定地理位置处的不同车辆和/或道路交通情况下共同或相等的运动规划器或控制器的部分计算被存储在数据库中。数据库可以处于车辆外部并且可以经由无线通信来访问。
[0037]
通信可以通过无线通信接口,诸如车对车(v2v)通信或车对基础设施(v2i)通信来进行。有时会使用通用术语车辆到万物(v2x)。
[0038]
在一些实施方式中,车辆100与数据库之间的通信可以经由v2v通信,例如基于专用短距离通信(dsrc)装置来执行。在一些实施方式中,dsrc工作在5.9ghz频带中,带宽为75mhz,大约范围为1000米。
[0039]
无线通信可以根据用于无线车载通信的任何ieee标准,例如称为车载环境中的无线访问(wave)的用于车载网络的ieee 802.11的特殊操作模式来进行。ieee 802.11p是对802.11无线lan介质访问层(mac)和物理层(phy)规范的扩展。
[0040]
这样的无线通信接口可以包括或至少受经由无线通信网络的无线通信技术,诸如wi-fi,以太网,无线局域网(wlan),3gpp lte,lte-advanced等的启发,仅提及一些选择。
[0041]
数据库然后可以向通过同一特定道路区段的任何其他自主车辆提供该信息。这将
会导致其他车辆会执行较少的计算(特别是不执行与数据库中的输出相关联的计算)。该信息可以被存储在地图中或在其驾驶时被传输给车辆100。
[0042]
车辆地图和/或数据库中的已存储的信息也可以与运算了成功路径或轨迹的用于车辆100的车辆配置参数一起被发送给后端。由此,在某些实施方式中,如果它们愿意,则可以在它们下载新地图更新时将向其他车辆提供。
[0043]
计算能力是自主车辆中的稀缺资源,并且已公开的解决方案减少了自主车辆100的运动规划的安全关键部件中的计算时间。这些益处可以在例如所有通过的车辆;特定品牌的车辆;具有相同所有者的车辆;订阅特定服务的车辆等之间共享。由此,节省了计算时间,使得能够使用车辆100车载的较不复杂的(即,较便宜的)计算资源。通过在路线运算上花费较少的计算工作量,计算能力被节省用于处理例如可能发生的特殊紧急情况。由此,增强了交通安全性,同时减少了经济上的努力。
[0044]
图2展示用于规划车辆100的车辆路线的栅格和五个突出显示的运动基元的实施例。这可以称为栅格规划。已预先计算的栅格可以是已预先计算的过程的实施例。
[0045]
对于寻找使车辆100从其当前位置到达目标位置,同时遵守动态约束的可行的状态序列的问题,栅格规划器是已知的解决方案。
[0046]
栅格是车辆100可以在其中移动的规划空间的离散化。通过选择环境中的有限状态集,并使用运动基元将这些状态相互连接,可以创建可能的运动组合图。然后可以在该图上执行搜索,以便找到规划问题的解决方案。
[0047]
栅格的创建的过程可以包括向上计算数千个运动基元,然后在这些运动基元上执行搜索。运动基元的创建是非常耗费计算量的过程,因为计算出的基元数量非常多。
[0048]
然而,多个车辆可以使用同一栅格,假设它们位于下方路段/道路110的同一段上。因此,可以预先计算栅格并将它们关联至下方路段110的某些部段。一旦车辆100正在下方路段110上行驶,就可以使用用于给定的下方路段110的栅格。该栅格可以被存储在数据库中并经由基于云的解决方案或v2x技术被发送给驶近特定的下方路段110的车辆。
[0049]
由于在下方路段110上存在障碍物或其他车辆,栅格不会变得无效,栅格基本上取决于下方路段110的几何形状,其通常本质上是静态的。
[0050]
图3呈现下方路段110,诸如道路部段,以及与其相关联的栅格。栅格可以被计算一次,被保存在与特定的下方路段110相关联的数据库中,然后被发送给正穿越该下方路段110的驶近的车辆100。车辆100然后可以使用该栅格来规划车辆路径,成功避免了障碍。
[0051]
图4示出一实施例,其中车辆100在执行运动规划时利用已提供的方法来减少其计算时间。车辆100确定并广播其沿着下方路段110的位置。已预先计算的过程,诸如下方路段110的道路栅格,可以被存储在数据库410中,与位置/坐标相关联。下方路段110的该道路栅格被提取并向车辆100提供,该车辆随后接收于当前的下方路段110相对应的栅格并可以将其用于路线规划。
[0052]
由此,减少了在车辆100的自身车载计算机上执行计算的需要。
[0053]
图5展示如先前在图4中展示的场景的实施例,因为其可以由车辆100的假设驾驶员感知到,但要记住,车辆100可以是没有驾驶员的自主车辆。
[0054]
车辆100可以包括用于自主车辆100的轨迹规划的控制设备120。
[0055]
此外,车辆100可以包括各种致动器540或调节装置,诸如或在功能上对应于由控
制设备120指示以便遵循确定的轨迹的用于进行侧向调节的驱动轮;和/或用于车辆位置的纵向调节的制动器,离合器踏板,加速器和/或变速箱。
[0056]
因此,致动器540或调节装置可以被配置为根据已确定的轨迹来调节下方路段110上的车辆100的位置,由此跟随前方的下方路段110。
[0057]
图示中的致动器/调节装置540具有适于驾驶员干预的设计。然而,在其他实施方式中,相同或相应的功能可以被应用在自主车辆100中,可能具有不同的设计。
[0058]
车辆100的地理位置在其中可获得可靠地图的一些实施方式中可以通过车辆100中的定位单元510以及包括地图数据的数据库520来确定,该定位单元可以基于卫星导航系统,诸如导航信号定时和测距(navstar)全球定位系统(gps),差分gps(dgps),伽利略(galileo),glonass等。
[0059]
定位单元510(以及由此车辆100)的地理位置根据各种实施方式可以以某些已预先确定或可配置的时间间隔连续地产生。
[0060]
通过卫星导航的定位基于使用来自多个卫星530a,530b,530c,530d的三角测量的距离测量。在该实施例中,描绘出四个卫星530a,530b,530c,530d,但这仅仅是实施例。可以使用四个以上的卫星530a,530b,530c,530d以提高精度或创建冗余。各卫星530a,530b,530c,530d连续地发送与时间和日期(例如以编码形式),身份(哪个卫星530a,530b,530c,530d广播),状态以及各卫星530a,530b,530c,530d在任何给定时间所处的位置有关的信息。各gps卫星530a,530b,530c,530d发送以不同代码编码的信息,例如但不一定基于码分多址(cdma)。这允许来自各个卫星530a,530b,530c,530d的信息基于用于每个相应卫星530a,530b,530c,530d的唯一代码来与其他卫星的信息区分开。该信息然后可以被传输以由被包括在车辆100中的已适当调整的定位装置接收。
[0061]
距离测量根据一些实施方式可以包括测量由相应的卫星530a,530b,530c,530d传输以到达定位单元510的每个相应的卫星信号所花费的时间的差距。由于无线电信号以光速行进,距相应卫星530a,530b,530c,530d的距离可以通过测量信号传播时间来计算。
[0062]
各卫星530a,530b,530c,530d的位置是已知的,因为它们由主要位于沿着地球的赤道和位于地球的赤道附近的大约15-30个地面站连续地监视。由此,车辆100的地理位置,即纬度和经度可以通过利用三角测量确定距至少三个卫星530a,530b,530c,530d的距离来运算出。为了确定海拔高度,根据一些实施方式可以使用来自四个卫星530a,530b,530c,530d的信号。
[0063]
车辆100的地理位置可以替代地例如通过以下方式来确定:将应答器定位在路线周围的已知位置以及车辆100中的专用传感器,用于认知应答器并由此确定位置;检测和认知wifi网络(沿着路径的wifi网络可以与数据库中的某些相应地理位置进行映射);接收与地理位置相关联的蓝牙信标信号或无线信号的其他信号签名,诸如通过三角测量由具有已知地理位置的多个固定基站发射的信号。
[0064]
车辆100车载的各种实体可以经由例如有线或无线通信总线彼此通信。通信总线可以包括例如控制器局域网(can)总线,面向媒体的系统传输(most)总线等。然而,通信可以可替代地通过包括或至少受任何先前讨论的无线通信技术启发的无线连接来进行。
[0065]
图6展示根据一实施方式的方法600的实施例。图5中的流程图示出控制设备120中的方法600,用于通过下方路段110(诸如道路部段,通道,停车场或类似的表面)的自主车辆
100的运动规划。
[0066]
控制设备120可以位于车辆外部结构,诸如控制塔中。替代地,在一些实施方式中,控制设备120可以位于自主车辆100中。
[0067]
为了能够正确地规划车辆100的运动,方法600可以包括多个步骤601-605。此外,已描述的步骤601-605可以以与编号建议略有不同的时间顺序来执行。一些方法步骤也可以以稍微不同的方式执行。方法600可以包括后续步骤:
[0068]
步骤601包括在驶近下方路段110时确定车辆100的地理坐标,或在车辆100车辆驶近时确定下方路段110的道路/车道/街道/停车标识符。
[0069]
车辆100的地理坐标可以由车辆100车载的定位单元510确定。替代地,道路/车道/街道/停车标识符可以从道路地图提取和/或由车辆100车载的传感器捕获。在又一些替代实施方式中,与下方路段110的道路/车道/街道/停车标识符相关联的路侧传感器可以识别车辆100的驶近。
[0070]
在一些实施方式中,车载的传感器130可以捕获在一些实施方式中包括道路/车道/街道/停车标识符的道路标志的图像。传感器130可以替代地捕获下方路段110的图像,其可以由图像认知/计算机视觉和物体认知来识别。
[0071]
传感器130可以包括或被连接至被配置为用于图像认知/计算机视觉和界标认知的控制设备120。计算机视觉是包括用于获取,处理,分析和理解图像以及通常来自现实世界的高维数据以便产生数字或符号信息的方法的技术领域。该领域的发展中的主题是通过电子感知和理解图像来复制人类视觉的能力。在上下文中,理解意味着将视觉图像(视网膜的输入)转换为对世界的描述,其可以与其他思维过程进行交互并采取适当的行动。该图像理解可以看作使用借助几何,物理,统计学和学习理论构建的模型来将符号信息从图像数据解离。计算机视觉还可以被描述为自动化和集成广泛的过程和表示用于视觉感知的计划。由此,相关的下方路段110可以被识别出。
[0072]
仅在一些实施方式中可以执行的步骤602包括向包括下方路段110的已预先计算的过程的数据库410提供已确定601的地理坐标或道路/车道/街道/停车标识符。
[0073]
下方路段110的已预先计算的过程可以包括以下项目中的任何一个,即一个或多个:已预先计算的轨迹,已预先计算的路径,已预先计算的栅格,已预先计算的坡度,已预先计算的采样偏差和/或已预先计算的避障建议,和/或已预先计算的加速/制动建议或类似功能。
[0074]
包括已预先计算的轨迹的已预先计算的过程可以加快多种运动规划和控制算法的速度。包括已预先计算的栅格的已预先计算的过程可以加快基于栅格的运动规划和控制算法的速度。包括已预先计算的坡度的已预先计算的过程可以加快基于数值优化的运动规划和控制算法的速度。包括已预先计算的采样偏差的已预先计算的过程可以加快基于快速探索随机树(rrt)方法的运动规划和控制算法的速度。已预先计算的过程包括已预先计算的障碍物规避建议,诸如在左侧/右侧绕过路线障碍物等。
[0075]
步骤603包括获得与已提供602的地理坐标或道路/车道/街道/停车标识符的路段110相关联的已预先计算的过程。
[0076]
已预先计算的过程根据一些实施方式可以从数据库410获得。
[0077]
在一些实施方式中,下方路段110的已预先计算的过程可以被存储在车辆地图中
并从车辆地图获得。
[0078]
步骤604包括基于已获得603的已预先计算的过程来规划车辆100在通过下方路段110期间的运动。
[0079]
运动规划可以基于已预先计算的过程来进行,该运动规划适合于来自车辆传感器130的输入,该输入涉及例如在下方路段110上检测到的障碍物。
[0080]
通过使用已进行的常规计算,节省了车辆100车载的计算量,从而在运动规划期间缩短了计算时间。
[0081]
仅在某些实施方式中可以执行的步骤605包括在车辆路径310的规划604期间向数据库410提供涉及已获得603的已预先计算过程的成功性的反馈。
[0082]
由此,可以通知控制设备120涉及下方路段110与已预先计算的过程之间的差异,该差异例如由于通过道路工程或下方路段110的其他调节或已预先计算的过程中的错误引起的下方路段110的变化而导致。因此,可以实现已预先计算的过程的增强的可靠性。
[0083]
在一些实施方式中,当意识到603已预先计算的过程无效时,控制设备120可以计算备选过程以使用其自身并将而这些发送回数据库410,该数据库然后可以将603已预先计算的过程更新为该过程。
[0084]
图7展示用于自主车辆100的运动规划的系统700。
[0085]
系统700包括控制设备120,其可以被包括在车辆外部结构,例如路边实体中。替代地,控制设备120可以被包括在车辆100中。
[0086]
控制设备120可以被配置为用于根据先前已描述的方法步骤601-605中的至少一些来执行已描述的方法600。控制设备120被配置为在驶近下方路段110时确定车辆100的地理坐标,或在车辆100驶近时确定下方路段110的道路/车道/街道/停车标识符。此外,控制设备120还被配置为获得与具有已提供的地理坐标或道路/车道/街道/停车标识符的下方路段110相关联的已预先计算的过程。控制设备120还被配置为基于已获得的已预先计算的过程来规划车辆100在通过下方路段110期间的运动。
[0087]
根据一些实施方式,控制设备120可以被进一步配置为向数据库410提供已确定的地理坐标或道路/车道/街道/停车标识符,该数据库包括下方路段110的已预先计算的过程。已预先计算的过程可以从数据库410获得。
[0088]
下方路段110的已预先计算的过程可以被存储在车辆地图中;并且已预先计算的过程可以从车辆地图获得。
[0089]
此外,控制设备120可以被配置为在车辆路径310的规划期间向数据库410提供涉及已获得的已预先计算的过程的成功性的反馈。
[0090]
下方路段110的已预先计算的过程可以包括以下项目中的任何一个:已预先计算的轨迹,已预先计算的路径,已预先计算的栅格,已预先计算的坡度,已预先计算的采样偏差和/或已预先计算的避障建议,和/或已预先计算的加速/制动建议。
[0091]
系统700还可以包括车辆100的一个或多个传感器130。传感器130可以沿驾驶方向105指向车辆100的前部;或沿任何其他任意方向指向。传感器130在不同的实施方式中可以包括例如摄像头,立体摄像头,红外摄像头,视频摄像头,雷达,激光雷达,超声设备,飞行时间摄像头或类似设备。
[0092]
在一些实施方式中,系统700可以包括各种致动器540或调节装置,诸如或在功能
上对应于由控制设备120指示以便执行车辆100的运动规划的用于进行侧向调节的驱动轮;和/或用于车辆位置的纵向调节的制动器,离合器踏板,加速器和/或变速箱。
[0093]
在一些实施方式中,控制设备120可以进一步包括输入单元710,其被配置为经由无线通信接口从传感器130和/或致动器540的无线通信装置获得信息。
[0094]
控制设备120可以进一步包括处理电路720,其被配置为用于根据先前已描述的步骤601-605来执行各种运算和计算以便执行方法600。
[0095]
这样的处理电路720可以包括处理电路的一个或多个实例,即中央处理单元(cpu),处理单元,处理器,专用集成电路(asic),微处理器或可以解释和执行指令的其他处理逻辑。本文中利用的表达“处理电路”因此可以表示包括多个处理电路的处理电路集,诸如以上列举的任何一个,一些或全部。
[0096]
此外,控制设备120在一些实施方式中可以包括存储器725。可选的存储器725可以包括用于临时或永久地存储数据或程序,即指令序列的物理装置。根据一些实施方式,存储器725可以包括集成电路,该集成电路包括基于硅的晶体管。存储器725可以包括例如存储卡,闪存,usb存储器,硬盘或用于存储数据的其他类似的易失性或非易失性存储单元,诸如在不同的实施方式中的rom(只读存储器),prom(可编程只读存储器),eprom(可擦除prom),eeprom(电可擦除prom)等。
[0097]
控制设备120还可以包括输出单元730,其被配置为经由无线通信接口向致动器540的无线通信装置提供信息。
[0098]
要在控制设备120中执行的先前已描述的方法步骤601-605可以通过控制设备120内的一个或多个处理电路720以及用于执行方法步骤601-605的功能中的至少一些的计算机程序制品一起实施。因此,包括用于在控制设备120中执行方法步骤601-605的指令的计算机程序制品可以在计算机程序被加载到控制设备120的一个或多个处理电路720中时执行包括用于自主车辆100的轨迹规划的方法步骤601-605中的至少一些的方法600。已描述的方法步骤601-605因此可以由计算机算法,机器可执行代码,非暂时性计算机可读介质,被编程到合适的可编程逻辑(诸如控制设备120中的处理器)中的适当地配置的硬件或软件指令来执行。
[0099]
上述计算机程序制品可以例如以携带计算机程序代码的数据载体的形式提供,该计算机程序代码用于在被加载到控制设备120的一个或多个处理器中时根据一些实施方式执行方法步骤501-505中的至少一些。数据载体可以是例如硬盘,cdrom盘,存储棒,光学存储装置,磁存储装置或可以以非暂时性的方式保存机器可读数据的任何其他适当介质,诸如磁盘或磁带。此外,计算机程序制品可以作为计算机程序代码提供在服务器上,并且例如通过因特网或内联网连接远程下载到控制设备120。
[0100]
如附图所示,在各实施方式的描述中使用的术语无意于限制已描述的方法600,控制设备120,计算机程序,系统700和/或车辆100。在不脱离由所附权利要求限定的发明实施方式的情况下,可以做出各种改变,替代和/或更改。此外,图1-7中所示的本文所述的不同实施方式可以在独立权利要求的范围内在各种其他实施方式中不受限制地组合和交换。
[0101]
如本文所使用的,术语“和/或”包括一个或多个相关联的所列项目的任何和所有组合。如本文所使用的,术语“或”将被解释为数学或,即包括性的析取;除非另有明确说明,否则不作为数学异或(xor)。另外,单数形式“一个”,“一种”和“该”应被解释为“至少一个”,
因此,除非另外明确指出,否则还可能包括多个相同种类的实体。还将理解,术语“包括”,“包含”,“正包括”和/或“正包含”指定存在所陈述的特征,动作,整数,步骤,操作,元素和/或部件,但是不排除存在或添加一个或多个其他特征,动作,整数,步骤,操作,元素,部件和/或其组。单个单元,诸如处理器可以满足权利要求中记载的几项功能。在互不相同的从属权利要求中记载某些措施的事实并不意味着不能有利地使用这些措施的组合。计算机程序可以被存储在/分发在合适的介质,诸如与其他硬件一起提供或作为其他硬件的一部分提供的光学存储介质或固态介质上,但是也可以以其他形式,诸如经由互联网或其他有线或无线通信系统分发。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1