具有非对称功率分配的磁悬浮列车系统的制作方法
具有非对称功率分配的磁悬浮列车系统
背景技术:
技术领域
1.本发明涉及磁悬浮列车系统,尤其涉及使用非对称功率分配来在整个轨道中改善效率。相关技术的描述
2.列车是由一系列连接的车辆组成的交通工具,通常沿铁轨轨道运行来运输货物或乘客,长期以来列车一直用作适用于所有类型的陆地行驶距离的运输方法来使用。
3.用于常规列车的动力是由单独的机车或自行式多个单元中的单个电动机提供的。虽然从历史上看蒸汽驱动占主导地位,但当今最常见的机车类型是柴油的和电力的,后者由架空线或附加铁轨提供。
4.因为浪费了大部分功率来抵消空气阻力和阻力摩擦力,所以常规列车系统的问题之一是效率低下的功耗。
5.为了解决这个问题,设想了磁悬浮列车系统,在磁悬浮列车系统中,施加排斥磁力使列车悬浮。所述力是由放置在列车上的磁体产生的,该磁体与被动导电轨道相互作用以使列车悬浮。通过利用被动磁悬浮,可以将阻力摩擦力减小到最小值,这导致了较低的功耗。
6.另外,磁悬浮(磁悬浮列车)系统使用另一组磁体来利用无摩擦力使列车以很大的速度向前移动。
7.一些磁悬浮系统计划使用去除了空气阻力的真空(无空气)管。因为常规磁悬浮系统由于气动阻力而损失了大部分功率,因此使用真空管具有大大提高速度和效率的潜力。
8.传统磁悬浮系统的功率分配包括向整个轨道提供功率,因此必须沿着完整轨道安装昂贵的绕组段,并且所有绕组段必须持续地电耦合到电流源。
9.文献us4840125a提出了磁悬浮列车系统,在该磁悬浮列车系统中,轨道被划分为子区,并且功率仅被提供给列车所位于的子区,因为该系统不会持续地向整个轨道供应能量,所以该方案在经济上是有利的。
10.文献us4840125a的系统的主要问题在于,无论磁悬浮系统的速度和预期功耗,必须向子区中的每个提供相同的功率,并且完整轨道必须包括绕组段,这是效率低下的,因为磁悬浮系统在应当加速或减速而不是在列车以最大恒定速度行驶时需要更多的功率。
11.出于以上解释的所有原因,可以说,磁悬浮系统中的功率分配通常被设计为与速度曲线(加速、巡航/稳态和减速)无关,这是没有效率和成本效益的,尤其是对于长的轨道而言。
技术实现要素:
12.本发明的目的是提供具有非对称功率分配的磁悬浮列车系统,该磁悬浮列车系统提高了效率并且减少了在安装和功率分配的维护中的必要投入。
13.本发明的具有非对称功率分配的磁悬浮列车系统包括移动通过至少部分位于无空气管内的轨道的列车,所述轨道具有至少两个站点,在所述至少两个站点中列车停止,例如以便让人们进入列车或离开列车。位于两个相关的站点之间的轨道的每个区段包括以下区域:-加速区域,在加速区域中列车开始移动直到列车达到巡航速度,加速区域位于两个相关的站点之间的轨道的区段的起始处并且包括全部沿着轨道的该区段的多个连续绕组段,所述绕组段彼此电连接并电连接到电流源,-减速区域,在减速区域中列车从巡航速度制动直到列车停止,减速区域位于两个相关的站点之间的轨道的区段的末端处,并且包括彼此电连接并电连接到电流源的多个连续绕组段,以及-巡航区域,在巡航区域中列车以巡航速度移动,巡航区域位于加速区域和减速区域之间,巡航区域包括电连接到电流源的多个绕组段,并且包括在绕组段中的一些之间的多个空隙空间。
14.在巡航区域,由于没有空气阻力或阻力摩擦力并且没有速度变化,因此无需向磁悬浮列车系统持续地提供功率。出于同样的原因,绕组段未被连续安装,绕组段在其间留有空隙空间,以这样的方式确保磁悬浮系统在巡航区域中的巡航速度不会低于最大速度的1%至3%。
15.在加速区域,连续的绕组段是必要的,因此列车才能达到巡航速度。优选地,在该区域中的绕组段的长度沿着列车的移动方向增加。在该过程的起始,绕组段的长度将会是其最小值,以便使功率优先于速度,这允许功率被用于加速而不是耗散在绕组中。一旦速度增加,优先级变为逐渐关注速度,因此绕组段的长度增加以允许更好地施加磁力。
16.在减速区域中,实现了列车的制动。在该区域中,列车的电动机连接被更改以将电动机变为发电机,因此,在制动期间,列车的速度被转化为功率,并将功率发送回电流源。减速区域中的连续绕组段的长度沿着列车的移动方向减小,以便更好地将转化后的功率吸收到电流源中。一旦列车的速度降低,绕组段的长度减小,以便以更有效率的方式吸收转化后的功率。
17.优选地,巡航区域包括布置在形成在绕组段之间的空隙空间上的低成本绕组段。当发生故障并且列车停止在巡航区域时,所引用的低成本绕组段允许列车以子巡航速度到达轨道上的下一个站点。
18.优选地,列车还包括具有支撑轮和由板载电池供电的电动机的转向架,所述支撑轮通过接触轨道允许列车的移动。因此,当在巡航区域处发生故障时,电动机帮助列车以子巡航速度到达最近的站点。
19.优选地,巡航区域包括加速绕组段,该加速绕组段大于巡航区域上的绕组段,并且加速绕组段的长度允许列车达到巡航速度。
附图说明
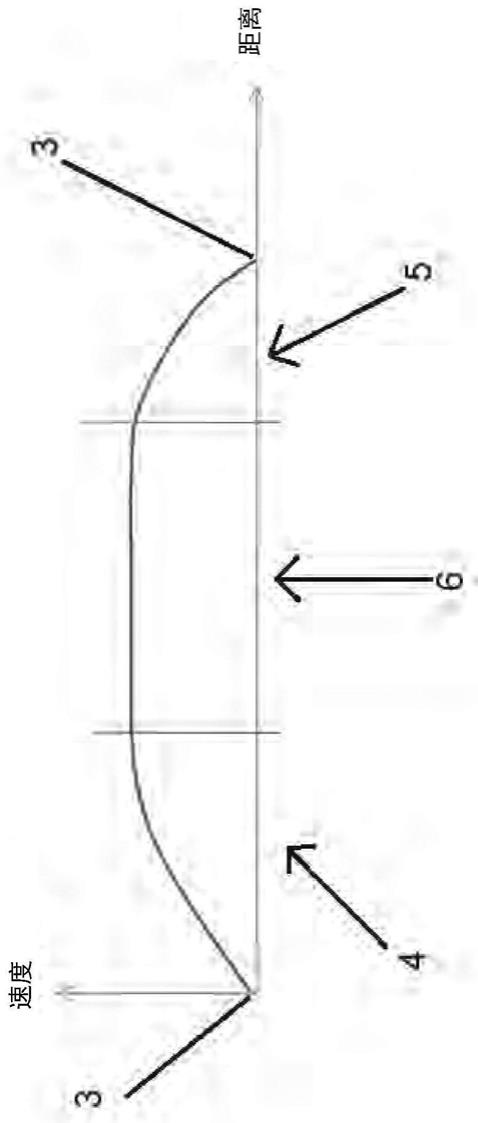
20.图1示出了表示沿着三个区域(加速、巡航和减速)的速度曲线的曲线图。
21.图2示出了表示在绕组段的不连续布置与绕组段的连续布置之间的速度方面的差异的曲线图。
22.图3示出了加速区域中的绕组段的长度增量。
23.图4示出了本发明所包括的以便当车舱停止在巡航区域中时将车舱带到轨道上的站点的元件。
24.图5示出了用于典型的四段式推进线性电动机的最佳连接。
具体实施方式
25.本发明的具有非对称功率分配的磁悬浮列车系统包括用于乘客和/或货物运输的列车1,所述列车1至少由车舱或机车形成,列车1移动通过部分地或完全地位于无空气(真空)管内的轨道2。当列车1在无空气管内移动时,列车1行驶时几乎没有空气阻力或摩擦力,这允许列车1非常有效率地达到高速度。
26.系统的轨道2具有至少两个站点3,列车1停止在两个站点3中,例如以便让人们进入或离开列车。如图1中所示,位于两个相关的站点3之间的轨道2的每个区包括以下区域:-列车1开始移动直到列车1达到巡航速度的加速区域4,该巡航速度是列车可以移动的最大速度的97%至100%的间隔。该加速区域4位于两个相关的站点3之间的轨道2的区段的起始处,加速区域4包括彼此电连接并电连接到电流源9的多个连续绕组段7,以便允许列车1达到巡航速度。该区域的主要目的是向列车1施加最大可能的功率,以使列车1加速直到列车1达到巡航速度。-列车1从巡航速度制动直到列车1停止的减速区域5。减速区域5位于两个相关的站点3之间的轨道2的区段的末端处,减速区域5包括彼此电连接并电连接到电流源9的多个连续绕组段7。该区域的目的是允许列车1制动,并将列车1的速度转化回功率,该功率被发送回电流源9中。-列车1以巡航速度移动的巡航区域6,巡航区域6位于加速区域4和减速区域5之间,巡航区域6包括电连接到电流源9的多个绕组段7,并且包括在绕组段7中的一些之间的多个空隙空间8。
27.假设地,如果列车1将在没有针对列车1的任何类型的摩擦力的情况下移动,则一旦达到巡航速度,在不对列车1施加任何功率的情况下,列车1将以恒定的速度移动。鉴于无空气管中的阻力摩擦力和空气阻力非常小,巡航区域6需要较少量的功率以便使列车1以恒定的速度移动。因为需要较少量的功率,所以巡航区域6中的绕组段7可以被间隔开,从而允许在绕组段7中的一些之间存在空隙空间8,空隙空间8以速度降很小的方式进行设计。使用这种方式,在巡航区域6中使用较少的绕组段7,巡航区域6是两个相关的站点3之间的轨道2的较大区段,并且由于铜的成本和功率系统的管理成本将下降,因此该方式导致了成本更低的解决方案。
28.图2示出了在已知解决方案的速度变化13和本发明的速度变化14之间进行比较的曲线图,在已知解决方案中,在巡航区域中放置了连续绕组段,并且在本发明的解决方案中,在巡航区域6中空隙空间8位于绕组段7中的一些之间。可以观察到,速度的变化几乎是不明显的。
29.如图3所示,在加速区域4中,绕组段7在该区域的起始处于其最小长度,并且绕组段7的长度沿行驶方向增加。其原因在于,绕组段7的长度对功率系统效率和功率因数具有直接影响。由于在行驶开始时列车1的速度低,因此绕组段7的长度可以较短,以这样的方式
使得更多的功率转到列车1。
30.在减速区域5中,绕组段7的长度相对于列车1的预期速度而变化。当速度处于巡航速度时,绕组段7的长度也处于其最大尺寸,而预期速度越低,绕组段7的长度越小。在列车1的制动期间,更改列车1的电动机连接以便将电动机变为发电机,所以列车1的速度被转化回功率,然后通过绕组段7将该功率发送回电流源9。
31.绕组段7可以基于轨道2的每个区段中所需的速度和功率而以串联、并联或混合(串联-并联)构造进行连接。
32.如图4中所示,磁悬浮列车系统包括一些系统,所述一些系统避免了当由于列车1中和/或轨道2中的错误或故障而导致列车1在巡航区域6上停止或列车1的速度降低时,列车1仍保持在发生故障的位置中,因此可以将列车1移动到轨道2上的下一个站点3。
33.为了解决该问题,本发明包括设置在绕组段7之间的空隙空间8上的低成本绕组段10。所引用的低成本绕组段10允许列车1以子巡航速度到达轨道2上的下一个站点3,在列车1由于同一问题而停止的情况下,在所述站点3可以修理列车1。
34.此外,列车1的转向架包括支撑轮和由板载电池供电的电动机11,该支撑轮可以设置为与轨道2接触并通过轨道2允许列车1的移动。因此,在列车1停止在巡航区域6处的情况下,所引用的电动机11通过列车1的支撑轮使列车1以子巡航速度移动,从而到达轨道2上的下一个站点3。
35.优选地,巡航区域6也包括一些加速绕组段12,加速绕组段12大于巡航区域6上的其余绕组段7,加速绕组段12的长度使得它们在系统上没有故障的情况下,允许列车1再次达到巡航速度。列车1上的电动机11和低成本绕组段10有助于列车1以子巡航速度到达这些加速绕组段12。
36.图5示出了典型的四段式推进线性电动机的最佳连接。在该示例中,在四段式推进线性电动机的每个模块中,段基于磁悬浮的速率以串联、串联-并联、和并联构造进行连接。基于所需的功率和力,段和模块的数量可以变化。
37.同样,基于速率和所需的加速,可以定义应当改变的段之间的连接距离。并且基于上述距离和电压限制,可以定义串联模块的数量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1