一种安全行车辅助车载机装置的制作方法
[0001]
本发明涉及车载机领域,具体涉及一种安全行车辅助车载机装置。
背景技术:
[0002]
车载机又称车载终端,车载终端是车辆监控管理系统的前端设备,一般隐秘地安装在各种车辆内,车载终端设备主要由车载视频服务器、lcd触摸屏、外接摄像机、通话手柄、汽车防盗器等各种外接设备组成。
[0003]
现有的车载机,多为辅助设备,其在使用时只能进行简单的辅助查看功能等,不能有效的提高车辆在行驶过程安全性,给车载机的使用带来了一定的影响,因此,提出一种安全行车辅助车载机装置。
技术实现要素:
[0004]
本发明所要解决的技术问题在于:如何解决现有的车载机,多为辅助设备,其在使用时只能进行简单的辅助查看功能等,不能有效的提高车辆在行驶过程安全性,给车载机的使用带来了一定的影响的问题,提供了一种安全行车辅助车载机装置。
[0005]
本发明是通过以下技术方案解决上述技术问题的,本发明包括显示屏、主控制处理模块、电源模块、安全检测模块、对外接口、内部存储、油路控制模块;
[0006]
所述安全检测模块包括陀螺仪检测传感器、脉冲速度检测传感器、车道识别摄像机模块;
[0007]
所述主控制处理模块包括视频解码芯片、arm cpu芯片、控制内存芯片、视频存储芯片、4g/5g传输模块、gps/bd定位模块;
[0008]
所述显示屏包括tft显示屏、led背光、光敏电阻;
[0009]
所述对外接口模块包括i/o接口、rs232/485接口、can接口、wan接口、usb接口、cf卡接口;
[0010]
所述电源模块包括给各个显示控制模块和芯片提供电源;
[0011]
所述内部存储模块包括与arm cpu相连接的ram、rom芯片。
[0012]
优选的,所述电源模块将车载dc12v或dc24v电源电压转换成安全行车辅助车载机装置中各模块、各芯片所需的dc12v、dc5v、dc3.3v电源。
[0013]
优选的,所述行车辅助车载机装置使用方法包括以下步骤:
[0014]
步骤一:利用陀螺仪检测传感器、脉冲速度检测传感器,实时检测车辆的实时速度、急加速、急减速、急转弯等,并将判断的实时状态数据传输给主控制处理模块;
[0015]
步骤二:之后利用车道识别摄像机,通过神经网络深度自学习算法,自适应识别车道线,当车辆意外偏离车道时,设备实时发出预警信息给主控制处理模块;
[0016]
步骤三:主控制处理模块将接收到车辆急加速、急减速、急转弯、车道偏离等信息处理完毕后,结合车辆gps数据和地图数据判断,针对异常数据,在车辆出现急加速、急减速、急转弯、车道偏离时,控制车辆油路,驾驶员在出现上述情况下,无法通过地板油门进行
车辆的急加速。
[0017]
步骤四:设备利用对外i/o接口、rs232/485接口、can接口、wan接口等接口,与车载设备,如监控主机、车载三牌、车身信息等进行互联互通。
[0018]
步骤五:设备利用usb接口、cf卡接口,可以将车辆的运行状态信息进行存储。
[0019]
本发明相比现有技术具有以下优点:该安全行车辅助车载机装置,本设计利用安装的陀螺仪检测传感器、脉冲速度检测传感器、车道识别摄像机,并结合车辆can速度、gps实时位置数据、卫星地图数据,实时判断车辆的运行状态,在车辆出现急加速、急减速、急转弯、车道偏离等异常加速状态的情况下,核心控制处理单元能结合车辆运行数据,实时控制车辆油路输出,限制车辆速度和加速度,并实时将车辆危险状态同步给中心,有效预防和减少灾害事故发生。
附图说明
[0020]
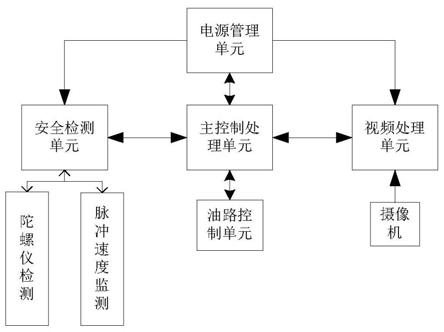
图1是本发明的系统框图;
[0021]
图2是本发明的流程框图。
[0022]
图中:1、电源模块;2、主控制处理模块;3、油路控制模块;4、车辆ecu接口;5、车道检测摄像机;6、陀螺检测仪;7、脉冲速度检测;8、gps/bd;9、4g/5g模块;10、ram、11、rom、12、i/o接口;13、串口;14、lan接口;15、can接口;16、usb接口;17、cf卡接口。
具体实施方式
[0023]
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0024]
如图1~2所示,本实施例提供一种技术方案:一种安全行车辅助车载机装置,包括显示屏、主控制处理模块、电源模块、安全检测模块、对外接口、内部存储、油路控制模块;
[0025]
所述安全检测模块包括陀螺仪检测传感器、脉冲速度检测传感器、车道识别摄像机模块;
[0026]
所述主控制处理模块包括视频解码芯片、arm cpu芯片、控制内存芯片、视频存储芯片、4g/5g传输模块、gps/bd定位模块;
[0027]
所述显示屏包括tft显示屏、led背光、光敏电阻;
[0028]
所述对外接口模块包括i/o接口、rs232/485接口、can接口、wan接口、usb接口、cf卡接口;
[0029]
所述电源模块包括给各个显示控制模块和芯片提供电源;
[0030]
所述内部存储模块包括与arm cpu相连接的ram、rom芯片。
[0031]
所述电源模块将车载dc12v或dc24v电源电压转换成安全行车辅助车载机装置中各模块、各芯片所需的dc12v、dc5v、dc3.3v电源。
[0032]
所述行车辅助车载机装置使用方法包括以下步骤:
[0033]
步骤一:利用陀螺仪检测传感器、脉冲速度检测传感器,实时检测车辆的实时速度、急加速、急减速、急转弯等,并将判断的实时状态数据传输给主控制处理模块;
[0034]
步骤二:之后利用车道识别摄像机,通过神经网络深度自学习算法,自适应识别车
道线,当车辆意外偏离车道时,设备实时发出预警信息给主控制处理模块;
[0035]
步骤三:主控制处理模块将接收到车辆急加速、急减速、急转弯、车道偏离等信息处理完毕后,结合车辆gps数据和地图数据判断,针对异常数据,在车辆出现急加速、急减速、急转弯、车道偏离时,控制车辆油路,驾驶员在出现上述情况下,无法通过地板油门进行车辆的急加速。
[0036]
步骤四:设备利用对外i/o接口、rs232/485接口、can接口、wan接口等接口,与车载设备,如监控主机、车载三牌、车身信息等进行互联互通。
[0037]
步骤五:设备利用usb接口、cf卡接口,可以将车辆的运行状态信息进行存储。
[0038]
综上,本发明在使用时,电源模块1给的主控制处理模块2、油路控制模块3、车道检测摄像机5、陀螺检测仪6、脉冲速度检测7供电,车道检测摄像机5将实时采集的分析的危险信息传输给的主控制处理模块2,主控制处理模块2将所接收到的异常危险数据按照等级,实时通过油路控制模块3和车辆ecu接口4控制车辆的油路输出,主控制处理模块2与的gps/bd8、4g/5g9进行通讯,主控制处理模块2通过的ram10、rom11、i/o接口12、串口13、lan接口14、can接口15、usb接口16、cf卡接口17接口与车辆及其他设备进行数据交互。
[0039]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0040]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0041]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1