用于跟随在路径上的最近车辆的系统和过程的制作方法
1.本公开总体上涉及用于自动驾驶或半自动驾驶车辆的用于跟随在路径上的最近车辆的系统和过程。
背景技术:
2.用于自动驾驶和半自动驾驶车辆的导航系统和方法利用计算机化的算法以为所控制的车辆确定导航路径。数字地图和传感器输入对于为车辆设置导航路径是有用的。传感器输入可包括车道标记物和街道特征的图像识别。传感器输入还可包括图像、雷达、光探测和测距(lidar)或其他类似的传感器识别类型,以监视其他车辆相对于所控制的车辆的位置,例如,以防止所控制的车辆在交通中过于靠近另一车辆。
技术实现要素:
3.提供了用于在路径上跟随的最近车辆的系统。该系统包括待控制车辆的传感器装置,该传感器装置生成与在路径上的最近车辆相关以及与在车辆前方的可行驶表面相关的数据。该系统还包括导航控制模块,该导航控制模块包括计算机化的处理器,该计算机化的处理器可操作以监视来自传感器装置的数据,评估该数据以确定在路径上的最近车辆所跟随的路径的质量评价,并且如果在路径上的最近车辆的质量评价高于高质量候选阈值,则基于该数据生成面包屑导航路径。该系统还包括车辆控制模块,该车辆控制模块基于面包屑导航路径控制待控制车辆。
4.在一些实施例中,确定质量评价包括以数值量化在路径上的最近车辆所跟随的路径。
5.在一些实施例中,评估数据包括基于数据确定在路径上的最近车辆在可行驶表面上的摆动,将该摆动与阈值摆动值进行比较,以及基于该比较确定在路径上的最近车辆的质量评价。
6.在一些实施例中,确定在路径上的最近车辆的摆动包括监视在路径上的最近车辆的航向误差。
7.在一些实施例中,确定在路径上的最近车辆的摆动包括监视在路径上的最近车辆的横向位置误差。
8.在一些实施例中,确定在路径上的最近车辆的摆动包括监视在路径上的最近车辆相对于在可行驶表面上的另一车辆的相对位置。
9.在一些实施例中,确定在路径上的最近车辆的摆动包括监视车辆的曲率误差。
10.在一些实施例中,评估数据包括基于数据确定在路径上的最近车辆在可行使表面上的稳定性,将该稳定性与阈值稳定性值进行比较,并且基于该比较确定在路径上的最近车辆的质量评价。
11.在一些实施例中,确定在路径上的最近车辆在可行使表面上的稳定性包括评估在路径上的最近车辆是否跟踪确立的行驶车道。
12.在一些实施例中,确定在路径上的最近车辆在可行使表面上的稳定性包括评估在路径上的最近车辆在确立的行驶车道中的动态轨迹。
13.在一些实施例中,传感器装置包括相机装置、雷达装置、激光雷达装置和超声装置中的一个。
14.在一些实施例中,基于面包屑导航路径控制待控制车辆包括确定在可行使表面上的车道几何形状,将该车道几何形状与面包屑导航路径融合以创建融合的导航路径,并且基于该融合的导航路径控制待控制车辆的轨迹。
15.在一些实施例中,车辆控制模块还基于质量评价控制距在路径上的最近车辆的距离。
16.在一些实施例中,车辆控制模块还基于质量评价控制车辆制动。
17.根据一个替代的实施例,提供了用于跟随在路径上的最近车辆的系统。该系统包括待控制车辆的传感器装置,该传感器装置生成与在路径上的最近车辆相关以及与在车辆前方的可行驶表面相关的数据。该系统还包括导航控制模块,该导航控制模块包括计算机化的处理器,该计算机化的处理器可操作以监视来自传感器装置的数据,评估该数据以确定在路径上的最近车辆所跟随的路径的质量评价,该质量评价包括量化在路径上的最近车辆所跟随的路径的数值,并且,如果在路径上的最近车辆的质量评价高于高质量候选阈值,则基于数据生成面包屑导航路径。该系统还包括车辆控制模块,该车辆控制模块基于面包屑导航路径控制待控制车辆。
18.根据一个替代的实施例,提供了用于跟随在路径上的最近车辆的过程。该过程包括通过待控制车辆的传感器装置收集数据,该数据与在路径上的最近车辆相关以及与在车辆前方的可行驶表面相关。该过程还包括在计算机化的处理器内,监视来自传感器装置的数据,评估该数据以确定在路径上的最近车辆所跟随的路径的质量评价,并且如果在路径上的最近车辆的质量评价高于高质量候选阈值,则基于数据生成面包屑导航路径。该过程还包括基于面包屑导航路径控制待控制车辆。
19.在一些实施例中,评估数据包括评估在路径上的最近车辆所跟随的路径的稳定性。
20.在一些实施例中,评估数据包括评估在路径上的最近车辆所跟随的路径的摆动。
21.在一些实施例中,该过程还包括如果在路径上的最近车辆的质量评价低于完全停止保证阈值,则自动停止待控制车辆。
22.当结合附图考虑时,根据以下用于实现本公开的最佳模式的详细描述,本公开的以上特征和优点以及其他特征和优点将是显而易见的。
23.本发明还提供了以下技术方案:1. 用于跟随在路径上的最近车辆的系统,包括:待控制车辆的传感器装置,所述传感器装置生成与在路径上的最近车辆相关的以及与在所述车辆前方的可行驶表面相关的数据;导航控制模块,所述导航控制模块包括计算机化的处理器,所述计算机化的处理器可操作以:监视来自所述传感器装置的所述数据;评估所述数据以确定所述在路径上的最近车辆所跟随的路径的质量评价;
如果所述在路径上的最近车辆的所述质量评价高于高质量候选阈值,则基于所述数据生成面包屑导航路径;以及车辆控制模块,所述车辆控制模块基于所述面包屑导航路径控制所述待控制车辆。
24.根据方案1所述的系统,其中,确定所述质量评价包括以数值量化所述在路径上的最近车辆所跟随的所述路径。
25.根据方案1所述的系统,其中,评估所述数据包括:基于所述数据确定所述在路径上的最近车辆在所述可行驶表面上的摆动;将所述摆动与阈值摆动值进行比较;以及根据所述比较确定所述在路径上的最近车辆的所述质量评价。
26.根据方案3所述的系统,其中,确定所述在路径上的最近车辆的所述摆动包括监视所述在路径上的最近车辆的航向误差。
27.根据方案3所述的系统,其中,确定所述在路径上的最近车辆的所述摆动包括监视所述在路径上的最近车辆的横向位置误差。
28.根据方案3所述的系统,其中,确定所述在路径上的最近车辆的所述摆动包括监视所述在路径上的最近车辆相对于在所述可行驶表面上的另一车辆的相对位置。
29.根据方案3所述的系统,其中,确定所述在路径上的最近车辆的所述摆动包括监视所述车辆的曲率误差。
30.根据方案1所述的系统,其中,评估所述数据包括:基于所述数据确定所述在路径上的最近车辆在所述可行使表面上的稳定性;将所述稳定性与阈值稳定性值进行比较;并且基于所述比较确定所述在路径上的最近车辆的所述质量评价。
31.根据方案8所述的系统,其中,确定所述在路径上的最近车辆在所述可行使表面上的所述稳定性包括评估所述在路径上的最近车辆是否跟踪确立的行驶车道。
32.根据方案8所述的系统,其中,确定所述在路径上的最近车辆在所述可行使表面上的所述稳定性包括评估所述在路径上的最近车辆在确立的行驶车道中的动态轨迹。
33.根据方案1所述的系统,其中,所述传感器装置包括相机装置、雷达装置、光探测和测距装置和超声装置中的一个。
34.根据方案1所述的系统,其中,基于所述面包屑导航路径控制所述待控制车辆包括:确定在所述可行使表面上的车道几何形状;将所述车道几何形状与所述面包屑导航路径融合,以创建融合的导航路径;并且基于所述融合的导航路径控制所述待控制车辆的轨迹。
35.根据方案1所述的系统,其中,所述车辆控制模块还基于所述质量评价控制距所述在路径上的最近车辆的距离。
36.根据方案1所述的系统,其中,所述车辆控制模块还基于所述质量评价控制车辆制动。
37.用于跟随在路径上的最近车辆的系统,包括:待控制车辆的传感器装置,所述传感器装置生成与在路径上的最近车辆相关的以及与在所述车辆前方的可行驶表面相关的数据;
导航控制模块,所述导航控制模块包括计算机化的处理器,所述计算机化的处理器可操作以:监视来自所述传感器装置的所述数据;评估所述数据以确定所述在路径上的最近车辆所跟随的路径的质量评价,所述质量评价包括量化所述在路径上的最近车辆所跟随的所述路径的数值;并且如果所述在路径上的最近车辆的所述质量评价高于高质量候选阈值,则基于所述数据生成面包屑导航路径;以及车辆控制模块,所述车辆控制模块基于所述面包屑导航路径控制所述待控制车辆。
38.用于跟随在路径上的最近车辆的过程,包括:通过待控制车辆的传感器装置收集数据,所述数据与在路径上的最近车辆相关以及与在所述车辆前方的可行驶表面相关;在计算机化的处理器内,监视来自所述传感器装置的所述数据;评估所述数据以确定所述在路径上的最近车辆所跟随的路径的质量评价;并且如果所述在路径上的最近车辆的所述质量评价高于高质量候选阈值,则基于所述数据生成面包屑导航路径;并且基于所述面包屑导航路径控制所述待控制车辆。
39.根据方案16所述的过程,其中,评估所述数据包括评估所述在路径上的最近车辆所跟随的所述路径的稳定性。
40.根据方案16所述的过程,其中,评估所述数据包括评估所述在路径上的最近车辆所跟随的所述路径的摆动。
41.根据方案16所述的方法,还包括,如果所述在路径上的最近车辆的所述质量评价低于完全停止保证阈值,则自动停止所述待控制车辆。
附图说明
42.图1示出了根据本公开的项,该项在定义用以量化cipv行为的过程中可是有用的;图2示意性地示出了根据本公开的示例性控制架构,该示例性控制架构用于操作本公开的过程和系统;图3示意性地示出了根据本公开的在所控制的车辆内的示例性数据通信系统;图4示出了根据本公开的由本公开的过程和系统控制的示例性车辆,包括用于认证cipv目标为高质量的装置和模块;图5示意性地示出了根据本公开的示例性计算机化的导航控制模块;以及图6是示出根据本公开的示例性过程的流程图,该过程用以评估cipv目标并确定cipv目标是否是用于面包屑导航的高质量候选。
具体实施方式
43.提供了用于自动驾驶或半自动驾驶车辆的跟随在路径上的最近车辆的过程和系统,其包括实时确定在所控制的车辆的当前路径上的最近车辆是否是跟随在当前路径上最近车辆所采取的路径的高质量候选。高质量候选可表现出低摆动(oscillation)行为。高质
量候选可表现出相对于道路几何形状的高稳定性。
44.通过跟随在路径上的最近车辆或最近在径车辆(cipv)的面包屑导航(breadcrumbing navigation)可用于处理车道跟随控制中的间断的车道标记质量。面包屑是指利用在所控制的车辆的路径上的其他车辆的位置为所控制的车辆设置路径。面包屑导航策略可无法将好的cipv行为相对于坏的cipv行为进行区分。提供了实时过程和系统,其可识别高质量cipv目标以进行跟随。通过利用由相机和雷达报告的目标cipv状态,该过程可量化cipv驾驶员的行为,或者为关于车道跟随表现的由车辆展示的驾驶质量分配数值。该过程可生成可描述为质量评价的值,该值可是数值,例如在1到100之间,其中较大的值描述较高质量的cipv行为。由该过程生成的质量评价可供面包屑导航使用,例如,通过将其与最低质量阈值(例如,为75)进行比较,以通过评价路径的置信度或质量决定是否利用该cipv路径。在其他实施例中,质量评价可是其他标量值,例如,a级至d级或五星至一星。cipv路径的置信度或质量评价的评估和确定可根据cipv的摆动或cipv的稳定性。cipv的稳定性可通过多种方式评价或评估,包括但不限于确定cipv是否跟踪行驶车道并监视cipv相对于道路或行驶车道的动态轨迹。此外,本公开的过程和系统可用于提供改善的视域,这意味着改善了关于道路的了解和对于在道路上行驶重要的信息。
45.对于车道跟随特征来说,车道标记的质量可是不高的,并且这导致间断的特征可用性。但是,由于驾驶员操作不佳或不一致,cipv的轨迹可是不可信的。驾驶员可分心、可在最后一刻做出改变车道的决定、可过于好斗地驾驶,并且通常可无法为跟随的车辆树立好的榜样。不加区分地跟随cipv可导致车辆跟随错误的路径或在错误的路径和正确的车道之间摆动。cipv数据中的过度变化可在面包屑导航操作中产生噪音。
46.通过审查cipv驾驶员的行为并选择性地采用来自cipv的位置和轨迹数据用于面包屑路径规划,本公开的系统可提高特征可用性和安全性。收集并认证为高品质的面包屑数据可单独地使用,或者可用于加强和合理化用于车道跟随的相机输入。本公开的系统可提供较好的相机/车道解释、视域和质量而不需要新硬件。在一个实施例中,本公开的过程和系统利用cipv状态的融合以认证并选择性地利用高质量的cipv数据,该cipv状态包括但不限于横向位置误差、航向误差和曲率误差。横向位置误差描述了cipv距离行驶车道的标称或期望中心的远离程度。航向误差描述了cipv的实际航向与基于行驶车道的几何形状的标称或期望航向之间的误差。曲率误差描述了由cipv导航的曲率与基于行驶车道的几何形状的标称或期望曲率相比之间的误差。通过评价或估计横向位置误差、航向误差和曲率误差,可评估或量化cipv作为待跟随的候选的质量。
47.用于确定或量化cipv作为待跟随的候选的质量的示例性算法作为公式1提供:
ꢀꢀꢀꢀꢀꢀꢀꢀ
[1]公式2、3和4描述了公式1中的项:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[2]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[3]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[4]e
ψ
描述了cipv的航向误差。e
y
描述了cipv的横向位置误差。e
ρ
描述了cipv的曲率误差。项y
blueline
描述了蓝线或目标/期望/参考轨迹的横向位置。项α1、α
2、
α3和α4描述了用于量化的加权因子。项δt描述了移动时间窗口的长度。操作fft描述了在公式1内应用的快速傅立叶变换算法。在一个实施例中,可使用本领域中可用的geortzel算法执行fft。项ω描述了低能带的频率。公式5、6和7进一步描述了公式1的项,描述了自t
now
经过δt2秒的窗口的矢量:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[5]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[6]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[7]提供公式1作为用于评估目标cipv是否是用于面包屑导航的高质量候选的示例算法。设想了许多替代算法,并且本公开并不旨在限于本文中提供的示例。
[0048]
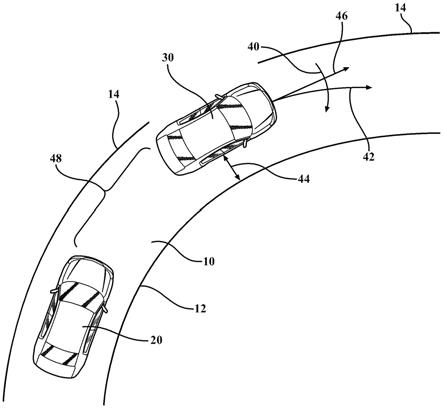
图1示出了在定义过程以量化cipv行为中可有用的项。图1中描述了公式1的项的一部分。所控制的车辆20示出为在路面10上,该路面10包括车道标记12和14。车道标记14示出为间断的,这对于仅利用车道标记来导航车辆的导航系统可是成问题的。cipv30示出为在路面10上。可基于cipv30及其相对于路面10和所控制的车辆20的运动定义多种项。项40描述了e
ψ
或cipv30的航向误差。项46描述cipv30的瞬时航向。项44描述了e
y
或cipv30的横向位置误差。项42描述了e
ρ
或cipv30的曲率误差。项48示出了描述移动时间窗口的长度的δt。
[0049]
基于面包屑导航路径控制待控制车辆可包括多个替代实施例。在一个示例性实施例中,待控制车辆可包括用以确定在可驾驶表面上的车道几何形状的设备。车辆可包括控制模块,以将车道几何形状与面包屑导航路径融合以创建融合的导航路径。然后可基于融合的导航路径控制待控制车辆的轨迹。
[0050]
图2示意性地示出了用于操作本公开的过程和系统的示例性控制架构。示出了控制架构100,其包括相机装置110、数字地图数据库120、数据融合模块130、任务计划模块140、纵向控制模块150、横向控制模块16以及电子助力转向/加速/制动模块170。相机装置110捕获与在所控制的车辆附近以及在所控制的车辆的路径上的环境相关的一系列图像,包括但不限于路面的图像、车道标记物的图像、邻近车辆的潜在障碍物的图像、所控制的车辆周围的车辆的图像以及其他用以控制车辆的相关信息的图像。数字地图装置120包括关于所控制的车辆附近的区域的数据,包括历史记录的道路几何形状、合成数据(诸如关于道路几何形状的车辆到车辆或设施到车辆的数据)以及关于车辆可在其上行驶的特定区域的可监视并储存的其他信息。数据融合模块130包括cipv模块132、cipv数据认证模块134和面包屑导航模块136。cipv模块132收集关于cipv的信息并自信息生成数据,该信息包括运动频率、轨迹和cipv的在形式车道内的横向位置的示例值。cipv数据认证模块134从cipv模块132接收生成的数据,并分析数据以确定cipv的行为是否保证将cipv分类为高质量目标并
且是对为面包屑导航收集数据有用的。如果cipv数据认证模块134确定cipv是高质量目标,则面包屑导航模块136利用来自cipv模块132的数据以生成面包屑导航图,使得所控制的车辆能够将导航移动部分或全部地基于cipv的移动/跟随cipv。
[0051]
任务计划模块140利用来自面包屑导航模块136的面包屑导航图和其他可用信息以生成命令的导航图。纵向控制模块150和横向控制模块160利用命令的导航图以确定期望的车辆速度和期望的车辆轨迹。电子助力转向/加速/制动模块170利用来自纵向控制模块150和横向控制模块160的输出以实现对所控制的车辆的导航的控制。提供控制架构100作为可利用以实施本公开的过程和系统的控制架构的一个示例性实施例。设想了其他实施例,并且本公开不旨在限于本文中提供的示例。
[0052]
图3示意性地示出了在所控制的车辆内的示例性数据通信系统。示出了数据通信系统200,其包括相机装置110、数字地图数据库120、传感器装置210、导航控制模块220和车辆控制模块230,其每个分别通信地连接到车辆数据总线240。传感器装置210可包括雷达装置、lidar装置、超声装置或其他可用于收集关于车辆的环境和在道路上的其他车辆的行为的数据的类似装置中的一个或多个。车辆数据总线240包括能够在多种连接的装置和模块之间快速地来回传输数据的通信网络。可从相机装置110、数字地图数据库120和传感器装置210中的每个收集数据,并将数据传输到导航控制模块220。导航控制模块220包括计算机化的处理器和可操作以创建命令的导航图的编程的代码,该命令的导航图用于在车辆附近的路面上导航所控制的车辆。
[0053]
图4示出了由本公开的过程和系统控制的示例性车辆,包括用于认证cipv目标为高质量的装置和模块。所控制的车辆300示出在包括车道标记320的路面310上。车辆300示出包括导航控制模块220、车辆控制模块230、相机装置110和传感器装置210。相机装置110包括视野112并且定位以捕获路面310和其他邻近所控制的车辆300的物体和障碍物(包括可是cipv的邻近的车辆)的图像。传感器装置210可额外地提供关于邻近所控制的车辆300的物体的数据。导航控制模块220从相机装置110和其他来源接收数据,并根据本公开的过程生成命令的导航图。车辆控制模块230利用命令的导航图以控制所控制的车辆300在路面310上的导航。所控制的车辆300提供为利用本公开的过程和系统的示例性车辆。设想了其他实施例,并且本公开不旨在限于本文中提供的示例。
[0054]
在本公开的系统内可利用多种控制模块以操作本公开的过程。控制模块可包括计算机化的装置,该计算机化的装置包括计算机化的处理器,该计算机化的处理器包括能够储存编程的可执行代码的存储器。控制模块可在单个计算机化的装置上操作,或者可跨若干计算机化的装置操作。图5示意性地示出了示例性计算机化的导航控制模块。导航控制模块220包括计算机化的处理器装置410、通信模块430、数据输入/输出模块420和存储器储存装置440。要注意的是,导航控制模块220可包括其他部件,并且在一些实施例中不存在部件中的一些。
[0055]
处理器装置410可包括储存处理器可执行指令的存储器以及执行该处理器可执行指令的一个或多个处理器,存储器例如只读存储器(rom)和随机存取存储器(ram)。在处理器装置410包括两个或更多个处理器的实施例中,处理器可并行操作或以分布式方式操作。处理器装置410可执行导航控制模块220的操作系统。处理器装置410可包括一个或多个模块,该模块执行编程的代码或包括可执行步骤的计算机化的过程或方法。示出的模块可包
括单个物理装置或跨多个物理装置的功能性。在说明性实施例中,处理器装置410还包括数据融合模块130、任务计划模块140和车道数据合成模块412,在下文中更详细地描述这些模块。
[0056]
数据输入/输出模块420是下述装置,即其可操作以获取从在车辆各处的传感器和装置收集的数据,并将该数据处理为可供处理器装置410使用的格式。数据输入/输出模块420还可操作以处理来自处理器装置410的输出,并使得在车辆各处的其他装置或控制模块能够使用该输出。
[0057]
通信模块430可包括带有总线装置的通信/数据连接,该总线装置配置为将数据传输到系统的不同部件,并且可包括一个或多个用于执行无线通信的无线收发器。
[0058]
存储器储存装置440是储存由导航控制模块220生成或接收的数据的装置。存储器储存装置440可包括,但不限于,硬盘驱动器、光盘驱动器和/或闪存驱动器。
[0059]
结合图2描述了数据融合模块130,并且该数据融合模块130可包括程序设计,该程序设计可操作以监视关于cipv目标的数据,评估cipv目标是否是待用于面包屑导航的高质量候选,并且基于关于cipv目标的数据生成面包屑导航图。
[0060]
结合图2描述了任务计划模块140,并且该任务计划模块140可包括程序设计,该程序设计可操作以基于生成的面包屑导航图和其他导航信息(诸如由车道数据合成模块412生成的车道数据)生成命令的导航图。
[0061]
车道数据合成模块412监视来自多种来源的与当前行驶车道相关的信息,该信息包括来自相机装置的数据、来自传感器装置的数据、来自数字地图装置的数据,并且车道数据合成模块412投影或估计来自可用来源的当前行驶车道的界限和边界。地图误差可存在于地图数据库内或在与当前位置相关的数据内。车道数据合成模块412可包括用于定位信息、融合多种信息的来源以及减少地图误差的算法。使这些界限和边界作为车道数据对其他模块可用。
[0062]
提供导航控制模块220作为示例性计算机化的装置,其能够执行编程的代码以评估并选择性地利用来自cipv目标的数据以生成面包屑导航图。设想了导航控制模块220、附接到该导航控制模块220的装置以及在其中可操作的模块的多种不同的实施例,并且本公开不旨在限于本文中提供的示例。
[0063]
图6是示出评估cipv目标并确定cipv目标是否是用于面包屑导航的高质量候选的示例性过程的流程图。过程500开始于步骤510处,在步骤510中探测cipv,例如,通过在由相机装置捕获的多个顺序的图像上利用图像识别。在步骤512处,生成cipv数据并将其分类,包括车辆横向位置、车辆速度等。在步骤514处,生成车道标记数据,包括车道中心数据、车道多项式等。在步骤516处,通过附加的步骤518并通过附加的步骤520确定cipv的质量,该步骤518包括评价cipv摆动,例如计算来自fft操作的能量,该步骤520包括利用示例性移动平均值计算评价cipv相对于道路的稳定性。在一个示例性实施例中,步骤518将cipv摆动与阈值摆动值进行比较,并且如果cipv阈值摆动值高于摆动值,则将cipv标记为不稳定。在一个示例性实施例中,步骤520将相对于道路的cipv稳定性与相对于道路值的阈值稳定性进行比较,并且如果相对于道路的cipv稳定性小于相对于道路值的阈值稳定性,则将cipv标记为不稳定。在步骤522处,考虑与cipv相关的额外数据,例如,包括转向信号的激活。在步骤524处,考虑与车道几何形状相关的额外数据,诸如考虑车道出口。在步骤526处,利用来
自步骤516、522和524的数据以确定性地将假阳性和假阴性从决定中清除出去。在步骤528处,确定cipv是否足够稳定以保证高质量的候选指定。如果确定cipv是高质量的候选,则过程前进到步骤530,在步骤530处将来自cipv的数据用作为用于面包屑导航的输入。如果确定cipv不是高质量的候选,则过程前进到步骤532,在步骤532处拒绝cipv用作为用于面包屑导航的候选。在一个实施例中,如果在步骤532处拒绝cipv,则可通知驾驶员。可就一系列cipv目标重复过程500,其中车辆继续搜索高质量cipv目标以跟随并用于面包屑导航。提供过程500作为示例性过程,以评估和选择性地利用来自cipv的数据用于面包屑导航。设想了许多类似的过程,并且本公开并不旨在限于本文中提供的示例。
[0064]
本文中描述的导航图可用于全自动驾驶车辆的命令导航。类似地,本文中描述的导航图可用于半自动驾驶车辆的命令导航,例如,以提供自动制动、车道转向(lane-tending)或障碍物避让。类似地,本文中描述的导航图可用于提供导航辅助,诸如投影图形或生成声音以辅助驾驶员有效地控制车辆。本文中提供了如何利用生成的导航图的示例。设想了其他实施例,并且本公开不旨在限于本文中提供的示例。
[0065]
面包屑导航路径一旦由本过程和系统生成,就可用于创建或影响融合的导航路径以用于引导或自动驾驶车辆。这样的面包屑导航路径,或者特别是在车辆附近的可驾驶表面上确定cipv的高摆动或低稳定性的,可用于进一步调节其他因素,诸如与cipv保持的距离。例如,如果cipv在稳定性方面得分较高,则可实施正常的跟随距离。如果相同的cipv开始表现出不稳定性,例如,由于驾驶员分心,则可利用较高的不稳定性或较低的稳定性,以基于对该驾驶员信任能力的降低而指示待控制车辆增加距cipv的距离。在另一示例性实施例中,高摆动或低稳定性的确定,例如,确定就特定cipv的质量评价是否下降到完全停止保证阈值以下,可用于命令车辆的自动制动或减速。例如,如果cipv开始在车道中来回穿梭,则可命令待控制车辆停止以避免cipv不规律地行驶。在另一实施例中,如果特定cipv的质量评价低于警告阈值,则可额外地或替代地警告待控制车辆的驾驶员,例如通过视觉图形或声音警告。
[0066]
本公开的过程和系统描述了用于自动驾驶和半自动驾驶车辆的特征可用性的改进。在一些导航过程缺少充分的数据和引导以有效地导航车辆的情况下,例如在缺少车道标记、车道标记矛盾或车道标记移位的施工区域中,本公开的过程和系统可用于验证并成功利用在待控制车辆前方的cipv的路径,以导航车辆通过示例性的施工区域。
[0067]
尽管已经详细描述了用于执行本公开的最佳模式,但是与本公开相关的领域的技术人员将认识到,在所附权利要求的范围内,用于实施本公开的多种替代设计和实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1