一种电动叉车的驱动和转向协同控制的结构与方法与流程
[0001]
本发明涉及电动叉车控制领域,尤其涉及一种电动叉车的分布式驱动和后轮转向协同控制的结构与方法。
背景技术:
[0002]
叉车是工业搬运车辆,是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆。国际标准化组织iso/tc110称为工业车辆。常用于仓储大型物件的运输,通常使用燃油机或者电池驱动。现有的电动叉车的技术中,转向系统及驱动系统为两个独立的操作系统,各自有着不同的控制策略。但在实际应用中,转向系统和驱动系统两者之间存在功能重叠,如果单一的优化某一系统的控制逻辑,会造成电动叉车运行过程的不稳定。
[0003]
现有的电动叉车驱动系统和转向系统各自独立控制,转向系统通过修正质心侧偏角,增加横摆角速度来实现车身转向;驱动系统在转向时可以通过施加轮胎纵向力,产生附加横摆力矩,帮助叉车更稳定地实现转向动作,控制车身稳定。但是,互相独立的转向系统和驱动系统不能很好的控制叉车运行时的动态稳定性,面向相同的控制对象,难免会出现相互干涉,造成叉车车身的不稳定,容易引起安全事故。
技术实现要素:
[0004]
本发明的目的是提供一种驱动系统和转向系统协同控制的电动叉车,实现叉车运行的稳定性。为此,本发明采用了以下技术方案。
[0005]
本发明首先提供一种电动叉车的驱动和转向协同控制的结构,包括控制模块、转向拉杆、左轮电机、右轮电机。
[0006]
所述控制模块包括ecu、主动后轮转向控制器和电机控制器;所述ecu分别连接于所述主动后轮转向控制器和所述电机控制器。
[0007]
所述主动后轮转向控制器连接所述转向拉杆;所述电机控制器分别连接所述左轮电机和所述右轮电机。
[0008]
本发明其次提供一种电动叉车的驱动和转向协同控制的方法,应用于上述的电动叉车的驱动和转向协同控制的结构,该协同控制的方法包括以下步骤:
[0009]
s1,在叉车要转向时,布置在车身上的角度传感器、车速传感器、后轮转角传感器、横摆角速度传感器实时获取车辆转向的参数,并将参数传输给所述主动后轮转向控制器内部设置的微处理器,微处理器计算得到需要执行的车轮转角;所述主动后轮转向控制器根据计算得到的车轮转角,控制转向拉杆运动,实现车辆转向;
[0010]
s2,所述ecu通过横摆角速度传感器获取实际横摆角速度,所述ecu计算实际横摆角速度与目标横摆角速度的偏差,若计算得出有偏差值,则所述ecu传输纠差指令给所述电机控制器,所述电机控制器控制所述左轮电机、所述右轮电机的转速,使车轮产生转速差,从而控制横摆角速度增益,实现偏差纠正。
[0011]
其中,步骤s1中,所述车辆转向的参数包括转向盘的转角和车速;通过所述角度传感器获取转向盘的转角参数;通过所述车速传感器获取当前车速。
[0012]
进一步地,步骤s2中,若所述ecu计算得出实际横摆角速度与目标横摆角速度的之间无偏差,则无纠差动作。
[0013]
其中,步骤s2中,所述ecu计算实际横摆角速度与目标横摆角速度的偏差的公式如下:
[0014][0015]
其中,r为横摆角速度,β为质心侧偏角,b为质心到后轴的距离,k为后轮侧偏刚度,u为纵向车速,i
z
为汽车绕z轴转动惯量,m为整车质量,δ为后轮转角,m
z
为横摆力矩。
[0016]
本发明最后提出一种包含上述驱动和转向协同控制的结构的电动叉车,根据所述的驱动和转向协同控制的方法,来控制叉车的转向。
[0017]
本发明的有益效果是:
[0018]
①
协同控制比单独实施分布式驱动控制及主动后轮转向使车辆具有更好的动态稳定性。
[0019]
②
协同控制能够提高车辆整体的性能指标,优化转向和驱动系统能力。
附图说明
[0020]
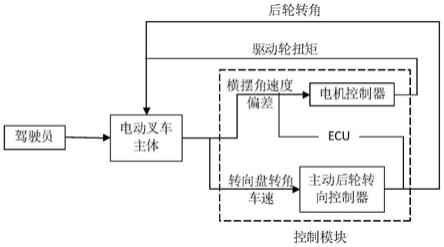
图1为一种电动叉车的驱动和转向协同控制的结构在电动叉车转向过程中的作用示意图。
[0021]
图2为一种电动叉车的驱动和转向协同控制的方法流程图。
具体实施方式
[0022]
下面结合附图对本发明的实施例进行详述。
[0023]
如图1所示,一种电动叉车的驱动和转向协同控制的结构,包括控制模块、转向拉杆、左轮电机、右轮电机。左轮电机、右轮电机分别连接在电动叉车的左车轮和右车轮上,形成分布式驱动结构。
[0024]
所述控制模块包括ecu、主动后轮转向控制器和电机控制器;所述ecu分别连接于所述主动后轮转向控制器和所述电机控制器。
[0025]
所述主动后轮转向控制器连接所述转向拉杆;所述电机控制器分别连接所述左轮电机和所述右轮电机。
[0026]
驾驶员通过转向盘输入转向信号给电动叉车,主动后轮转向控制器接收电动叉车转向盘转角和车速的信号,通过计算得出后轮转角,控制车辆转向。电机控制器接收电动叉车的横摆角速度信号,通过ecu计算横摆角速度偏差,并通过电机控制器控制驱动轮扭矩,来控制横摆角速度增益,实现叉车更平稳的转向,增加安全运行系数。
[0027]
如图2所示,为一种电动叉车的驱动和转向协同控制的方法流程图,应用于上述的电动叉车的驱动和转向协同控制的结构。当电动叉车的运行工况为直线行驶时,未触发转向控制机制,当电动叉车的运行工况为转弯时,进行如下驱动和转向协同控制:
[0028]
s1,在叉车要转向时,布置在车身上的角度传感器、车速传感器、后轮转角传感器、横摆角速度传感器实时获取车辆转向的参数,并将参数传输给所述主动后轮转向控制器内部设置的微处理器,微处理器计算得到需要执行的车辆转角;主动后轮转向控制器根据计算得到的车轮转角,控制转向拉杆运动,实现车辆转向;
[0029]
s2,ecu通过横摆角速度传感器获取实际横摆角速度,计算实际横摆角速度与目标横摆角速度的偏差,即横摆角速度偏差。若计算得出有偏差值,则ecu传输纠差指令给所述电机控制器,所述电机控制器控制所述左轮电机、所述右轮电机的转速,使车轮产生转速差,从而控制横摆角速度增益,实现偏差纠正,使车辆平稳转向。若所述ecu计算得出实际横摆角速度与目标横摆角速度的之间无偏差,则无纠差动作,车辆也能平稳转向。
[0030]
其中,步骤s1中,所述车辆转向的参数包括转向盘的转角和车速;通过所述角度传感器获取转向盘的转角参数;通过所述车速传感器获取当前车速。
[0031]
其中,步骤s2中,所述ecu计算实际横摆角速度与目标横摆角速度的偏差的公式如下:
[0032][0033]
其中,r为横摆角速度,β为质心侧偏角,b为质心到后轴的距离,k为后轮侧偏刚度,u为纵向车速,i
z
为汽车绕z轴转动惯量,m为整车质量,δ为后轮转角,m
z
为横摆力矩。
[0034]
本发明最后提出一种包含上述驱动和转向协同控制的结构的电动叉车,根据所述的驱动和转向协同控制的方法,来控制叉车的转向。协同控制提高了车辆整体的性能指标,优化转向和驱动系统能力,使车辆具有更好的动态稳定性。
[0035]
上述的具体实施方式只是示例性的,是为了更好的使本领域技术人员能够理解本发明,不能理解为是对本发明包括范围的限制;只要是根据本发明所揭示精神的所作的任何等同变更或修饰,均落入本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1