一种双行星排功率分流混合动力系统的构型优化方法与流程
[0001]
本发明涉及混合动力汽车技术领域,尤其是涉及一种双行星排功率分流混合动力系统的构型优化方法。
背景技术:
[0002]
随着日益严重的能源短缺与环境污染问题,世界各国对燃料消耗和排放的监管日趋严格,使得深度混合动力和插电式混合动力汽车得到了快速发展和应用。作为它们的代表,功率分流混合动力汽车,凭借其出色的油耗性能得到市场的普遍认可,是同时满足市场需求和法规要求的最具竞争力的方案之一。
[0003]
功率分流系统由行星排耦合机构、发电机、电动机、发动机、蓄电池、湿式制动器或离合器等组成,一般使用一个或多个行星齿轮排作为功率分流装置,通过发动机、电机和输出轴的不同组合产生各种系统配置,通过换挡执行器连接行星齿轮元件。
[0004]
相比于单行星排功率分流混合动力系统,双行星排功率分流混合动力系统具有更多的工作模式,能够获得更强的动力性和更佳的经济性,而相对三行星排功率分流混合动力系统而言,虽然双行星排功率分流混合动力系统的动力性稍有逊色,但已能够覆盖绝大多数车型的需要,且双行星排构型在结构设计和控制复杂程度上远优于三行星排构型。因此,双行星排构型是当下功率分流混合动力系统潜力较大的方案。
[0005]
由于发动机、电机和输出轴的不同组合,以及通过换挡执行器连接的行星齿轮元件,双行星排功率分流混合系统构型有很多系统变体,这也增加了双行星排构型的设计难度。目前对双行星排构型设计的研究主要基于杠杆法、图论法、自动化建模等方法,通过枚举或者遍历生成的方式得到对应的构型库,进而实现双行星排系统的构型优化设计工作。如杠杆法将一个行星齿轮机构简化为一个杆模型,由于功率分流式混合动力系统构型比较复杂,利用杠杆法可以在很大程度上简化分析。但由于生成的构型数量多,优化空间大,计算复杂度高,研究人员通常仅选择其中部分构型进行优化设计,很少对所有可行构型进行全面优化设计,导致最终确定的优化方案具有局限性。
[0006]
同时,对于数量庞大的双行星排系统构型方案,构型方案的评价方法在构型优化设计和构型选择中起着关键的作用,它将直接影响到最终的整车性能、控制复杂性、制造成本、可靠性等诸多指标。然而,大多数研究仅选择加速性能或燃油经济性或两者同时作为评价构型优化设计有效性的指标,很少考虑其他制造和工程相关指标,缺乏综合性能评价方法。
技术实现要素:
[0007]
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种双行星排功率分流混合动力系统的构型优化方法,考虑了双行星排的所有潜在构型,对所有可行构型进行全面优化设计,分析的构型范围更为全面,同时能适应不同用户设计目标的工程化需求;以构型的经济性、动力性、舒适性、可靠性的综合性能评价指标作为优化目标函数,对构型
进行了全面优化设计,实现了构型综合性能最佳方案的快速寻优。
[0008]
本发明的目的可以通过以下技术方案来实现:
[0009]
一种双行星排功率分流混合动力系统的构型优化方法,包括以下步骤:
[0010]
s1:根据预设置的离合器约束条件和双行星排功率分流混合动力系统的部件之间的可能连接关系,生成构型库和构型库中各个构型的子构型;
[0011]
s2:自构型库中移除不满足预设置的构型约束条件的构型,建立各个构型的通用能量管理策略;
[0012]
s3:基于天牛须搜索算法对构型库中的各个构型的构型参数进行初步优化,得到各个构型的初步优化构型,对初步优化构型进行初步筛选,得到由初步优化构型组成的初步优化构型库,所述构型参数包括第一行星排速比、第二行星排速比和主减速器速比;
[0013]
s4:基于模糊层次分析法、熵权法和灰色关联法,建立候选方案集筛选模块;
[0014]
s5:基于粒子群优化算法和候选方案集筛选模块,对初步优化构型库中的各个初步优化构型的构型参数进行优化,得到各个初步优化构型的优化构型;
[0015]
s6:基于候选方案集筛选模块自所有优化构型中筛选得到最优构型,记录所述最优构型的构型方案和构型参数。
[0016]
进一步的,所述步骤s1包括以下步骤:
[0017]
s11:获取预设置的离合器约束条件,所述离合器约束条件为离合器数量最大值n(n≥1);
[0018]
s12:获取双行星排功率分流混合动力系统的部件,所述部件包括行星排机构组件和动力源部件,生成行星排机构组件和动力源部件之间所有可能的部件连接关系集,生成离合器安装位置集,所述离合器安装位置集包括使用1个离合器时离合器的可能安装位置、使用2个离合器时离合器的可能安装位置、
…
、使用n个离合器时离合器的可能安装位置;
[0019]
s13:合并部件连接关系集和离合器安装位置集,得到构型库;
[0020]
s14:根据离合器安装位置集,生成离合器结合位置集,所述离合器结合位置集包括使用1个离合器时离合器的可能结合位置、使用2个离合器时离合器的可能结合位置、
…
、使用n个离合器时离合器的可能结合位置,对构型库中的各个构型,根据离合器结合位置集,得到各个构型的所有子构型。
[0021]
进一步的,所述步骤s2包括以下步骤:
[0022]
s21:获取预设置的构型约束条件,所述构型约束条件包括工作模式数量最小值和必要的工作模式;
[0023]
s22:分别构建构型库中各个构型的子构型的动力学模型,识别各个构型的子构型所对应的工作模式,为各个构型添加工作模式属性,所述工作模式属性包括工作模式数量和各个工作模式的类型;
[0024]
s23:遍历构型库中的所有构型,获取各个构型的工作模式属性,若一个构型的工作模式数量小于工作模式数量最小值或者该构型的所有工作模式中不包含必要的工作模式,则自构型库中移除该构型;
[0025]
s24:对于构型库中的所有构型,基于各个构型的子构型的动力学模型建立基于ecms的通用能量管理策略。
[0026]
更进一步的,所述步骤s24包括以下步骤:
[0027]
s241:获取双行星排功率分流混合动力系统的输出轴的转矩需求和双行星排功率分流混合动力系统的动力源部件的工作点范围限制;
[0028]
s242:自构型库中选取一个构型,获取该构型的工作模式属性和各个子构型的动力学模型;
[0029]
s243:根据动力源部件的工作点范围限制和各个子构型的动力学模型,分别计算各个子构型下所有满足输出轴的转矩需求的转矩指令组合,所述转矩指令组合包括各个动力源部件的转矩指令;
[0030]
s244:基于ecms算法计算各个转矩指令组合的瞬时燃油消耗,对于每个子构型,选取瞬时燃油消耗最小的转矩指令组合作为该子构型的最佳转矩指令组合;
[0031]
s245:选取瞬时燃油消耗最小的最佳转矩指令组合和该最佳转矩指令组合对应的子构型的工作模式作为该构型的通用能量管理策略;
[0032]
s246:重复步骤s242,直至得到构型库中所有构型的通用能量管理策略。
[0033]
进一步的,所述步骤s3包括以下步骤:
[0034]
s31:自构型库中选取一个构型作为当前优化构型,获取各个构型参数的优化边界,随机生成各个构型参数的初始值,将初始值的组合作为初始天牛位置,根据通用能量管理策略计算初始天牛位置对应的初始优化值,将初始天牛位置记为全局最优位置,将初始优化值记为全局最优值;
[0035]
s32:获取当前天牛位置,随机生成两须的方向,计算两须之间的距离,根据两须的方向、两须之间的距离和当前天牛位置计算得到两须的位置,分别计算两须的气味强度,根据通用能量管理策略分别计算两须位置对应的须优化值,并选取最小的须优化值作为当前优化值,若当前优化值小于全局最优值,则将全局最优值更新为当前优化值,所述气味强度的计算公式具体为:
[0036]
fleft=k
fuel
×
f
fuel
(xl)+k
acc
×
f
acc
(xl)
[0037]
fright=k
fuel
×
f
fuel
(xr)+k
acc
×
f
acc
(xr)
[0038]
其中,fleft和fright分别表示左须的气味强度和右须的气味强度,k
fuel
和k
acc
分别表示燃油经济性和动力性的比例系数,f
fuel
(*)表示基于当前优化构型的通用能量管理策略和当前须的位置计算得出百公里油耗,单位为l/100km,f
acc
(*)表示基于当前优化构型和当前须的位置计算得出百公里加速时间,单位为s,xl表示左须位置,xr表示右须位置;
[0039]
s33:比较两须的气味强度,更新当前天牛位置;
[0040]
s34:重复步骤s32,直至执行次数大于预设置的初步优化迭代次数阈值或者全局最优值达到稳定状态,所述全局最优值达到稳定状态具体为在ki(ki≥2)次迭代中全局最优值的变化误差小于预设置的初步优化稳定阈值min;
[0041]
s35:记录全局最优值和全局最优值对应的全局最优位置,将当前优化构型的构型参数组合更新为全局最优位置所代表的构型参数组合,得到当前优化构型的初步优化构型;
[0042]
s36:重复步骤s31,直至得到构型库中所有构型的初步优化构型;
[0043]
s37:按照全局最优值的大小将所有初步优化构型排序,保留全局最优值最小的多个构型,得到初步优化构型库。
[0044]
更进一步的,所述步骤s5中,初步优化迭代次数阈值、ki和初步优化稳定阈值min
的取值是根据构型的复杂度、优化的精度需求所确定的。
[0045]
进一步的,所述步骤s4包括以下步骤:
[0046]
s41:获取候选方案集,获取评价指标,评价指标的数量为nu(nu≥4),对于候选方案集中的各个候选方案,分别计算各个评价指标的得分值,得到各个候选方案的各个评价指标的得分值,对各个候选方案的各个评价指标的得分值进行标准化处理,得到各个候选方案的各个评价指标的标准化得分值;
[0047]
s42:选取一个评价指标,获取所有候选方案中该评价指标的标准化得分值,选取其中最大的标准化得分值作为该评价指标的理想参考值;
[0048]
s43:重复步骤s42,直至得到所有评价指标的理想参考值,所有的评价指标的理想参考值组成理想参考序列,根据各个候选方案的各个评价指标的标准化得分值和理想参考序列计算灰色关联度系数,具体为:
[0049][0050]
其中,γ(r
ip
,r
0,p
)表示第i个候选方案的第p个评价指标与理想参考序列的灰色关联系数,ε为预设置的分辨因子,δ
ip
为第i个候选方案的第p个评价指标的标准化得分值与理想参考序列中第p个评价指标的理想参考值之差的绝对值;
[0051]
s44:将所有的评价指标划分为经济性部分、动力性部分、可靠性部分和舒适性部分,基于模糊层次法分别计算各部分内部的评价指标之间的主观权重系数,基于熵权法计算各部分内部的评价指标之间的客观权重系数,根据各部分内部的评价指标之间的主观权重系数和客观权重系数,计算各部分内部的评价指标之间的权重系数;
[0052]
s45:将经济性部分、动力性部分、可靠性部分和舒适性部分视为四个特殊的评价指标,基于模糊层次法计算这四个部分之间的权重系数;
[0053]
s46:根据四个部分之间的权重系数和各部分内部的评价指标之间的权重系数,计算所有评价指标的综合权重系数;
[0054]
s47:根据灰色关联度系数和所有评价指标之间的综合权重系数,计算灰色关联度,并选取灰色关联度最大的候选方案作为最佳方案,灰色关联度的计算公式具体为:
[0055][0056]
其中,ρ
i
为第i个候选方案与理想参考序列的灰色关联度,γ(r
ip
,r
0,p
)表示第i个候选方案的第p个评价指标与理想参考序列的灰色关联系数,w
target_index_rj
为部分r内部的第j个评价指标的综合权重系数,部分r为经济性部分、动力性部分、可靠性部分和舒适性部分中任一个部分,随着p值的变化,第j个评价指标也发生相应变化,以保证第j个评价指标与第p个评价指标相一致;
[0057]
s48:选取灰色关联度最大的候选方案为候选方案集中的最佳方案。
[0058]
进一步的,所述步骤s5包括以下步骤:
[0059]
s51:自初步优化构型库中选取一个初步优化构型作为待优化构型,随机初始化生成粒子群中各粒子的速度和初始位置,其中,粒子的不同位置表示构型参数不同取值的组合,将粒子群中各粒子的初始位置记为各粒子的个体最优位置,并分别生成各个粒子的个
体最优位置集,所述个体最优位置集为空集;
[0060]
s52:获取各粒子的个体当前位置和各粒子的个体最优位置集,分别构建各粒子的粒子候选方案集,所述粒子候选方案集包括粒子的个体当前位置和粒子的个体最优位置集,分别使用候选方案集筛选模块对各粒子的粒子候选方案集进行筛选,将各粒子的个体最优位置更新为筛选结果;
[0061]
s53:获取各粒子的个体最优位置,在各粒子的个体最优位置集中添加各粒子的个体最优位置,并构建粒子群候选方案集,所述粒子群候选方案集包括各粒子的个体最优位置,使用候选方案集筛选模块对粒子群候选方案集进行筛选,将筛选结果作为群体最优位置;
[0062]
s54:根据群体最优位置和各粒子的个体最优位置,更新各粒子的速度和位置;
[0063]
s55:重复步骤s52,直至执行次数大于预设置的优化迭代次数阈值或群体最优位置达到稳定状态,所述群体最优位置达到稳定状态具体为在kp(kp≥2)次迭代中群体最优位置所代表的各个构型参数的变化误差均小于预设置的优化稳定阈值minp;
[0064]
s56:记录群体最优位置,将待优化构型的构型参数组合更新为群体最优位置所代表的构型参数组合,得到待优化构型的优化构型;
[0065]
s57:重复步骤s51,直至得到初步优化构型库中所有初步优化构型的优化构型。
[0066]
更进一步的,所述步骤s55中优化迭代次数阈值、kp和优化稳定阈值minp的取值是根据构型的复杂度、优化的精度需求所确定的。
[0067]
进一步的,所述步骤s6包括以下步骤:
[0068]
s61:获取所有的优化构型,构建最终候选方案集,所述最终候选方案集包括所有的优化构型;
[0069]
s62:使用候选方案集筛选模块对最终候选方案集进行筛选,将筛选结果作为最优构型;
[0070]
s63:记录最优构型的构型方案和构型参数组合,所述构型方案包括部件连接关系、离合器安装位置。
[0071]
与现有技术相比,本发明具有以下有益效果:
[0072]
(1)本方法考虑了双行星排的所有潜在构型,动力部件的所有连接位置,不同离合器数量和对应的工作模式组合情况,对所有可行构型进行全面优化设计,分析的构型范围更为全面,同时能适应不同用户设计目标的工程化需求,在任意给定的设计边界下都可以快速地找到最佳方案,为商业化产品开发奠定了基础。
[0073]
(2)本方法综合考虑动力性和经济性,基于天牛须搜索算法对构型库进行初步筛选,减轻了后续优化的工作量,缩短了优化时间,再使用粒子群优化算法获取最佳构型及其构型参数组合,减轻了计算复杂度,优化效果更好。
[0074]
(3)建立综合考虑动力性、经济性、舒适性和可靠性的候选方案集筛选模块,基于模糊层次分析法、熵权法和灰色关联分析法计算评价指标的综合权重系数,提供了一种双行星排构型方案的综合性能评价方法,更加科学。
[0075]
(4)将候选方案集筛选模块与粒子群优化算法结合,以构型的经济性、动力性、舒适性、可靠性的综合性能评价指标作为优化目标函数,对构型进行了全面优化设计,实现了构型综合性能最佳方案的快速寻优,且为其他行星排式混合动力传动系统评价及优化提供
了参考,可作为多目标优化的基本目标融入系统设计过程中。
附图说明
[0076]
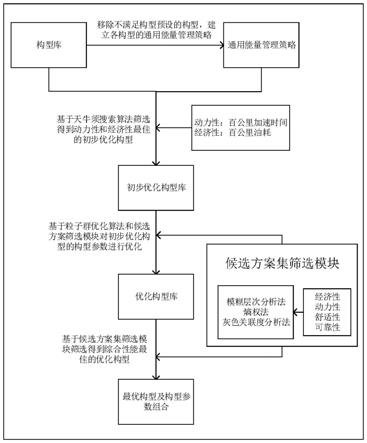
图1为构型优化方法的流程图;
[0077]
图2为生成的构型库和各个构型的子构型的示意图;
[0078]
图3为构建通用能量管理策略的流程示意图。
具体实施方式
[0079]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0080]
实施例1:
[0081]
一种双行星排功率分流混合动力系统的构型优化方法,流程如图1所示,主要包括:构型库生成、通用能量管理策略的建立、天牛须搜索(beetle antennae search-bas)算法初筛、构型综合性能评价与筛选过程。其中,构型方案综合性能评价与筛选过程包括粒子群优化算法(particle swarm optimization-pso)二次筛选和候选方案集筛选模块两部分。
[0082]
主要步骤为:
[0083]
s1:根据预设置的离合器约束条件和双行星排功率分流混合动力系统的部件之间的可能连接关系,生成构型库和构型库中各个构型的子构型;
[0084]
s2:自构型库中移除不满足预设置的构型约束条件的构型,建立各个构型的通用能量管理策略;
[0085]
s3:基于天牛须搜索算法对构型库中的各个构型的构型参数进行初步优化,得到各个构型的初步优化构型,对初步优化构型进行初步筛选,得到由初步优化构型组成的初步优化构型库,所述构型参数包括第一行星排速比、第二行星排速比和主减速器速比;
[0086]
s4:基于模糊层次分析法、熵权法和灰色关联法,建立候选方案集筛选模块;
[0087]
s5:基于粒子群优化算法和候选方案集筛选模块,对初步优化构型库中的各个初步优化构型的构型参数进行优化,得到各个初步优化构型的优化构型;
[0088]
s6:基于候选方案集筛选模块自所有优化构型中筛选得到最优构型,记录所述最优构型的构型方案和构型参数。
[0089]
步骤s1包括以下步骤:
[0090]
s11:获取预设置的离合器约束条件,离合器约束条件为离合器数量最大值n(n≥1)。
[0091]
s12:获取双行星排功率分流混合动力系统的部件,部件包括行星排机构组件和动力源部件,生成行星排机构组件和动力源部件之间所有可能的部件连接关系集,生成离合器安装位置集,离合器安装位置集包括使用1个离合器时离合器的可能安装位置、使用2个离合器时离合器的可能安装位置、
…
、使用n个离合器时离合器的可能安装位置。
[0092]
s13:合并部件连接关系集和离合器安装位置集,得到构型库。
[0093]
s14:根据离合器安装位置集,生成离合器结合位置集,离合器结合位置集包括使
用1个离合器时离合器的可能结合位置、使用2个离合器时离合器的可能结合位置、
…
、使用n个离合器时离合器的可能结合位置,对构型库中的各个构型,根据离合器结合位置集,得到各个构型的所有子构型。
[0094]
本实施例中,首先确定离合器的数量n,再建立双行星排(2pg)构型通用数学描述方法,即使用数字1~11来描述双行星排功率分流混合动力系统的部件,其中,编号1~3分别代表前行星排齿圈、行星架和太阳轮;编号4~6分别代表后行星排齿圈、行星架和太阳轮;编号7代表变速箱的壳体(固定部件);编号8~11分别代表变速器的输出轴、发动机、电机1和电机2;再使用数字组合来描述部件(动力源部件(8-11)与行星排机构组件(1-6))之间的连接关系,使用顺序组合表示固定连接关系;同时,使用括号数字组合来描述两组件间的离合器,且离合器的状态均为接合状态;通过数字组合和括号数字组合便可以确定任意一种构型的具体连接关系。由于换挡执行元件状态的确定,这一构型连接关系相当于该构型在某一工作模式下的连接形态,此时,可将其称为这一构型的某一子构型。通过改变离合器的结合位置,可以得到该构型的不同子构型。
[0095]
本实施例中自动遍历生成2pg构型库和所有的子构型,生成的构型库和各个构型的子构型的示意图如图2所示。
[0096]
从数字1~6中有序产生所有4个数字的组合,将其与8~11组合;将离合器所有可能的安装位置进行编号,然后从编号中不区分顺序分别产生n个,n-1个,
…
,1个编号组合,n为离合器数量最大值;合并两类组合的结果,得到所有构型,进行存储,从而完成构型库的建立。
[0097]
从数字1~6中有序产生所有4个数字的组合,将其与8~11组合;将离合器所有可能的结合位置进行编号,然后从编号中不区分顺序分别产生n个,n-1个,
…
,1个编号组合。n为离合器数量最大值;合并两类组合的结果,得到所有构型的子构型,进行存储,从而完成子构型库的建立。
[0098]
步骤s2包括以下步骤:
[0099]
s21:获取预设置的构型约束条件,构型约束条件包括工作模式数量最小值和必要的工作模式。
[0100]
s22:分别构建构型库中各个构型的子构型的动力学模型,识别各个构型的子构型所对应的工作模式,为各个构型添加工作模式属性,工作模式属性包括工作模式数量和各个工作模式的类型。
[0101]
s23:遍历构型库中的所有构型,获取各个构型的工作模式属性,若一个构型的工作模式数量小于工作模式数量最小值或者该构型的所有工作模式中不包含必要的工作模式,则自构型库中移除该构型。
[0102]
s24:对于构型库中的所有构型,基于各个构型的子构型的动力学模型建立基于ecms的通用能量管理策略。
[0103]
构型约束条件用于排除构型库中不实用的构型,如只有1种、2种子构型的构型,因其只能实现1种、2种工作模式,故舍弃该类构型,如不包含启动加速工作模式、减速制动工作模式的构型,没有实用性,故舍弃该类构型。
[0104]
首先建立各个子构型的动力学模型:
[0105]
[0106]
t=[t
o t
e t
g t
m 0 0 0 0 0 0 0 0]
t
[0107][0108][0109]
其中,矩阵e是转移变换矩阵,用于反映动力源部件与行星机构组件的连接关系;矩阵c是转移变换矩阵,用于反映行星机构组件之间或行星机构组件与行星机构机架间的离合器连接关系;矩阵q是转移变换矩阵,主要用于消除合并后角加速度;t
o
、t
e
、t
g
和t
m
分别表示输出轴转矩、发动机输出转矩、电机1输出转矩和电机2输出转矩;和分别表示输出轴角加速度、发动机角加速度、电机1角加速度和电机2角加速度,j
o
、j
e
、j
g
和j
m
分别表示输出轴的等效惯量、发动机转动惯量、电机1转动惯量和电机2转动惯量;分别表示输出轴的等效惯量、发动机转动惯量、电机1转动惯量和电机2转动惯量;和分别表示第一行星排齿圈、行星架、太阳轮的角加速度和第二行星排齿圈、行星架、太阳轮的角加速度;j
r1
、j
c1
、j
s1
、j
r2
、j
c2
和j
s2
分别表示第一行星排齿圈、行星架和太阳轮的转动惯量和第二行星排齿圈、行星架和太阳轮的转动惯量;pg1和pg2分别表示第一和第二行星排的速比;f1和f2分别表示第一行星排和第二行星排行星齿轮与其他齿轮之间的内力矩。
[0110]
其中,矩阵e的计算方法具体如下:
[0111]
(1)初始化生成12
×
12的单位矩阵;
[0112]
(2)根据动力源部件与行星机构组件的连接关系,对12
×
12的单位矩阵进行转换,具体如下:
[0113]
row
nodea
=row
nodea
+row
nodeb
[0114]
row
nodeb
=[]
[0115]
其中,row
nodea
代表部件a对应关系基础矩阵行号,row
nodeb
代表部件b对应关系基础矩阵行号。部件a的行号必须小于部件b对应的行号。如果某部件连接到行星机构机架,那么直接消除该行。
[0116]
部件与行号对应关系为:行号1-10依次对应为输出轴、发动机、电机1、电机2、第一行星排齿圈、第一行星排行星架、第一行星排太阳轮、第二行星排齿圈、第二行星排行星架和第二行星排太阳轮。
[0117]
同时,矩阵c的计算方法具体如下:
[0118]
1)初始化生成8
×
8的单位矩阵;
[0119]
2)根据动力源部件与行星机构组件的连接关系,对8
×
8的单位矩阵进行转换,具体如下:
[0120]
row
nodea
=row
nodea
+row
nodeb
[0121]
row
nodeb
=[]
[0122]
其中,row
nodea
代表部件a对应关系基础矩阵行号,row
nodeb
代表部件b对应关系基础矩阵行号。部件a的行号必须小于部件b对应的行号。如果某部件连接到行星机构机架,那么直接消除该行。
[0123]
部件与行号对应关系为:行号1-10依次对应为输出轴、发动机、电机1、电机2、第一行星排齿圈、第一行星排行星架、第一行星排太阳轮、第二行星排齿圈、第二行星排行星架和第二行星排太阳轮。
[0124]
而矩阵q由在矩阵e和矩阵c的计算过程中消除的行所组成的。
[0125]
根据动力学模型确定各个子构型的工作模式,如启动加速模式、正常行驶模式、减速制动模式等,记录各构型的工作模式属性,即该构型包括的工作模式的数量和工作模式的类型。
[0126]
基于动力学模型,对构型库中的各个构型构建基于ecms的通用能量管理策略,ecms(equivalent fuel consumption minimizationstrategy)即等效燃油消耗最小能量管理策略,流程图如图3所示,具体为:
[0127]
s241:获取双行星排功率分流混合动力系统的输出轴的转矩需求和双行星排功率分流混合动力系统的动力源部件的工作点范围限制;
[0128]
s242:自构型库中选取一个构型,获取该构型的工作模式属性和各个子构型的动力学模型;
[0129]
s243:根据动力源部件的工作点范围限制和各个子构型的动力学模型,分别计算各个子构型下所有满足输出轴的转矩需求的转矩指令组合,所述转矩指令组合包括各个动力源部件的转矩指令;
[0130]
s244:基于ecms算法计算各个转矩指令组合的瞬时燃油消耗,对于每个子构型,选取瞬时燃油消耗最小的转矩指令组合作为该子构型的最佳转矩指令组合;
[0131]
s245:选取瞬时燃油消耗最小的最佳转矩指令组合和该最佳转矩指令组合对应的子构型的工作模式作为该构型的通用能量管理策略;
[0132]
s246:重复步骤s242,直至得到构型库中所有构型的通用能量管理策略。
[0133]
步骤s3包括以下步骤:
[0134]
s31:自构型库中选取一个构型作为当前优化构型,获取各个构型参数的优化边界,随机生成各个构型参数的初始值,将初始值的组合作为初始天牛位置,根据通用能量管理策略计算初始天牛位置对应的初始优化值,将初始天牛位置记为全局最优位置,将初始优化值记为全局最优值;构型参数包括第一行星排速比、第二行星排速比和主减速器速比。
[0135]
s32:获取当前天牛位置,随机生成两须的方向,计算两须之间的距离,根据两须的方向、两须之间的距离和当前天牛位置计算得到两须的位置,分别计算两须的气味强度,根据通用能量管理策略分别计算两须位置对应的须优化值,并选取最小的须优化值作为当前优化值,若当前优化值小于全局最优值,则将全局最优值更新为当前优化值。
[0136]
随机生成须的方向,如下式所示:
[0137]
dir=rands(n,1)
[0138]
dir_n=dir/norm(dir)
[0139]
其中,dir表示须的方向向量;n表示构型参数的种类数;rands(n,1)表示随机生成n维向量;dir_n表示归一化后的须的方向向量;norm(*)表示返回向量的2范数。
[0140]
计算两须的距离,进而根据天牛位置和须的方向计算得到须的位置;
[0141]
两须距离计算公式为:
[0142]
d=d0*(0.95)q
[0143]
其中,d为当前迭代次数下两须的距离;d0为两须距离初始值;q为当前迭代次数。
[0144]
同时,得到须的位置具体如下:
[0145]
xl=x+d*dir_n/2
[0146]
xr=x-d*dir_n/2
[0147]
其中,x表示天牛位置;xl表示左须位置;xr表示右须位置。
[0148]
根据两须的位置,基于当前优化构型的通用能量管理策略,计算两须位置对应的须优化值,选取其中最小的须优化值作为当前优化值,若当前优化值小于全局最优值,则将全局最优值更新为当前优化值。
[0149]
气味强度的计算公式具体为:
[0150]
fleft=k
fuel
×
f
fuel
(xl)+k
acc
×
f
acc
(xl)
[0151]
fright=k
fuel
×
f
fuel
(xr)+k
acc
×
f
acc
(xr)
[0152]
其中,fleft和fright分别表示左须的气味强度和右须的气味强度,k
fuel
和k
acc
分别表示燃油经济性和动力性的比例系数,f
fuel
(*)表示基于当前优化构型的通用能量管理策略和当前须的位置计算得出百公里油耗,单位为l/100km,f
acc
(*)表示基于当前优化构型和当前须的位置计算得出百公里加速时间,单位为s,xl表示左须位置,xr表示右须位置。
[0153]
百公里油耗的计算具体为:根据当前优化构型和当前须的位置明确当前构型的具体参数,基于所建立的通用能量管理策略,以wltc工况为目标工况,得出百公里油耗(l/100km);
[0154]
百公里加速时间的计算具体为:基于动力源部件的工作点范围限制,以及该构型各个工作模式下的动力学模型,计算出当前状态下该构型的最大输出转矩。并将最大输出转矩所对应的工作模式和各动力源部件的转矩指令作为最终决策结果,并结合车辆纵向动力学模型,得出百公里加速时间(s)。
[0155]
s33:比较两须的气味强度,天牛移动,更新当前天牛位置;
[0156]
位置更新公式如下:
[0157]
x=x-c*d*dir*sign(fleft-fright)
[0158]
其中,c为常数项;sign(*)函数为符号函数,当fleft-fright>0时,sign(*)=1,当fleft-fright<0时,sign(*)=-1。
[0159]
s34:重复步骤s32,直至执行次数大于预设置的初步优化迭代次数阈值或者全局最优值达到稳定状态,全局最优值达到稳定状态具体为在ki(ki≥2)次迭代中全局最优值的变化误差小于预设置的初步优化稳定阈值min。初步优化迭代次数阈值、ki和初步优化稳定阈值min的取值是根据构型的复杂度、优化的精度需求所确定的。
[0160]
s35:记录全局最优值和全局最优值对应的全局最优位置,将当前优化构型的构型
参数组合更新为全局最优位置代表的构型参数组合,得到当前优化构型的初步优化构型;
[0161]
s36:重复步骤s31,直至得到构型库中所有构型的初步优化构型;
[0162]
s37:按照全局最优值的大小将所有初步优化构型排序,保留全局最优值最小的多个构型,得到初步优化构型库,如有20个初步优化构型的全局最优值相同且都是最小的,则这20个初步优化构型组成初步优化构型库。
[0163]
步骤s4包括以下步骤:
[0164]
s41:获取候选方案集,获取评价指标,评价指标的数量为nu(nu≥4),对于候选方案集中的各个候选方案,分别计算各个评价指标的得分值,得到各个候选方案的各个评价指标的得分值,对各个候选方案的各个评价指标的得分值进行标准化处理,得到各个候选方案的各个评价指标的标准化得分值。
[0165]
s42:选取一个评价指标,获取所有候选方案中该评价指标的标准化得分值,选取其中最大的标准化得分值作为该评价指标的理想参考值。
[0166]
s43:重复步骤s42,直至得到所有评价指标的理想参考值,所有的评价指标的理想参考值组成理想参考序列,根据各个候选方案的各个评价指标的标准化得分值和理想参考序列计算灰色关联度系数,具体为:
[0167][0168]
其中,γ(r
ip
,r
0,p
)表示第i个候选方案的第p个评价指标与理想参考序列的灰色关联系数,ε为预设置的分辨因子,δ
ip
为第i个候选方案的第p个评价指标的标准化得分值与理想参考序列中第p个评价指标的理想参考值之差的绝对值。
[0169]
s44:将所有的评价指标划分为经济性部分、动力性部分、可靠性部分和舒适性部分,基于模糊层次法分别计算各部分内部的评价指标之间的主观权重系数,基于熵权法计算各部分内部的评价指标之间的客观权重系数,根据各部分内部的评价指标之间的主观权重系数和客观权重系数,计算各部分内部的评价指标之间的权重系数。
[0170]
s45:将经济性部分、动力性部分、可靠性部分和舒适性部分视为四个特殊的评价指标,基于模糊层次法计算这四个部分之间的权重系数。
[0171]
s46:根据四个部分之间的权重系数和各部分内部的评价指标之间的权重系数,计算所有评价指标的综合权重系数。
[0172]
s47:根据灰色关联度系数和所有评价指标之间的综合权重系数,计算灰色关联度,并选取灰色关联度最大的候选方案作为最佳方案,灰色关联度的计算公式具体为:
[0173][0174]
其中,ρ
i
为第i个候选方案与理想参考序列的灰色关联度,γ(r
ip
,r
0,p
)表示第i个候选方案的第p个评价指标与理想参考序列的灰色关联系数,w
target_index_rj
为部分r内部的第j个评价指标的综合权重系数,部分r为经济性部分、动力性部分、可靠性部分和舒适性部分中任一个部分,随着p值的变化,第j个评价指标也发生相应变化,以保证第j个评价指标与第p个评价指标相一致。
[0175]
s48:选取灰色关联度最大的候选方案为候选方案集中的最佳方案。
[0176]
评价指标具体包括标准工况能量消耗,标准工况系统平均效率,电机驱动模式平均效率,电机制动模式平均效率,混动模式百公里加速时间,混动模式最高车速,混动模式最大爬坡能力,纯电动模式最高车速,纯电动模式最大爬坡能力,标准工况下工作模式切换频度,工作模式切换前后平均转速差,工作模式切换前后最大转速差,动力电池soc波动程度和动力电池平均输出功率。它们的计算过程如下:
[0177]
标准工况能量消耗可通过车辆经济性仿真计算得出,而标准工况系统平均效率η
dc_avg
的具体计算如下:
[0178]
η
dc_avg
=e
dc_required
/e
dc_consume
[0179]
式中,e
dc_required
表示标准工况下总能量的需求值;e
dc_consume
表示标准工况下的实际能量消耗值。
[0180]
电机驱动模式平均效率η
drv_g_avg
的具体计算如下:
[0181]
η
drv_g_avg
=e
drv_g
/e
drv_g_battery
[0182]
式中,e
drv_g
为电机驱动工作模式下能量输出的总和,e
drv_g_battery
为电机驱动工作模式下动力电池消耗能量的总和。
[0183]
电机制动模式平均效率η
gen_g_avg
的具体计算如下:
[0184]
η
gen_g_avg
=e
gen_g_battery
/e
gen_g
[0185]
式中,e
gen_g_battery
为电机制动工作模式下动力电池充电能量的总和,e
gen_g
为电机制动工作模式下回收能量的总和。
[0186]
混动模式百公里加速时间的计算可通过动力源部件的工作点范围限制,以及该候选方案下各混动模式的动力学模型,计算出当前状态下该构型的最大混动模式输出转矩。并将最大输出转矩所对应的混动模式和各动力源部件的转矩指令作为最终决策结果,结合车辆纵向动力学模型得出。
[0187]
而混动模式最高车速和混动模式最大爬坡能力,均可通过动力源部件的工作点范围限制,以及该候选方案下各混动模式的动力学模型,并结合车辆纵向动力学模型而计算得出。类似地,纯电动模式最高车速和纯电动模式最大爬坡能力,均可通过动力源部件的工作点范围限制,以及该候选方案下各纯电动模式的动力学模型,并结合车辆纵向动力学模型而计算得出。
[0188]
标准工况下工作模式切换频度,工作模式切换前后平均转速差和工作模式切换前后最大转速差,均可基于所建立的通用能量管理策略,在车辆经济性仿真过程中对工作模式切换次数、实现工作模式切换功能的离合器在切换前后的离合器主从动侧转速差进行统计而得出;
[0189]
动力电池soc波动程度可基于所建立的通用能量管理策略,通过车辆经济性仿真计算动力电池在标准工况下的soc工作上下限的波动程度而得出;类似地,动力电池平均输出功率可基于所建立的通用能量管理策略,通过车辆经济性仿真计算动力电池在标准工况下的每时刻的输出功率求得。
[0190]
将所有评价指标分为效益型指标和成本型指标,效益型指标包括:标准工况系统平均效率,电机驱动模式平均效率,电机制动模式平均效率,混动模式最高车速,混动模式最大爬坡能力,纯电动模式最高车速,纯电动模式最大爬坡能力;成本型指标包括:标准工况能量消耗,混动模式百公里加速时间,标准工况下工作模式切换频度,工作模式切换前后
平均转速差,工作模式切换前后最大转速差,动力电池soc波动程度和动力电池平均输出功率。
[0191]
其中针对效益型指标的标准化处理过程为:
[0192][0193]
式中,r
ip
表示第i个候选方案的第p个评价指标标准化之后的数值;d
ip
表示第i个候选方案的第p个评价指标的得分值;m表示候选方案集中候选方案的总数量。
[0194]
针对成本型指标的标准化处理过程为:
[0195][0196]
对于每个评价指标,获取所有候选方案中该评价指标的标准化得分值,选取其中最大的标准化得分值作为该评价指标的理想参考值。
[0197]
所有的评价指标的理想参考值组成理想参考序列,根据各个候选方案的各个评价指标的标准化得分值和理想参考序列计算灰色关联度系数,具体为:
[0198][0199]
其中,γ(r
ip
,r
0,p
)表示第i个候选方案的第p个评价指标与理想参考序列的灰色关联系数,ε为预设置的分辨因子,设为定值,δ
ip
为第i个候选方案的第p个评价指标的标准化得分值与理想参考序列中第p个评价指标的理想参考值之差的绝对值。
[0200]
将所有的评价指标划分为经济性部分、动力性部分、可靠性部分和舒适性部分,经济性部分包括标准工况能量消耗,标准工况系统平均效率,电机驱动模式平均效率,电机制动模式平均效率;动力性部分包括混动模式百公里加速时间,混动模式最高车速,混动模式最大爬坡能力,纯电动模式最高车速,纯电动模式最大爬坡能力;可靠性部分包括动力电池soc波动程度和动力电池平均输出功率;舒适性部分包括标准工况下工作模式切换频度,工作模式切换前后平均转速差,工作模式切换前后最大转速差。
[0201]
基于模糊层次法分别计算各部分内部的评价指标之间的主观权重系数,具体为:
[0202]
首先将专家重要程度判断的语言化描述转换成相应的模糊数,构建模糊判断矩阵;首先基于专家重要程度判断的语言化描述与模糊数的对应关系:同等重要、稍微重要、重要、非常重要和绝对重要依次对应为(1,1,1)、(1,3,4)、(4,5,6)、(6,7,8)和(8,9,9),将不同专家重要程度判断的语言化描述转换成相应的模糊数,根据不同专家给出的模糊数,构建如下所示的模糊判断矩阵:
[0203][0204]
其中,u和l分别代表模糊数的上限值和下限值,m代表着模糊数隶属度为1时的取
值。的计算具体如下:
[0205][0206]
式中,代表第k位专家给出指标i相对指标j的模糊数。
[0207]
且运算符的计算具体如下:
[0208][0209]
其次,根据模糊判断矩阵进行去模糊化处理,并计算主观权重系数。
[0210]
先计算各个指标的综合模糊数d
i
,具体如下:
[0211][0212]
然后,基于去模糊化计算获得各个指标的主观权重系数:
[0213][0214][0215]
式中,p(d
i
≥d
j
)代表d
i
≥d
j
的可能度,d
i
和d
j
分别代表第i和j个指标的综合模糊数;为第i个指标的主观权重系数。其中,p(d
i
≥d
j
)的计算具体如下:
[0216][0217]
其中,mi和mj表示第i和j个指标下综合模糊数隶属度为1时的取值,ui和uj表示第i和j个指标下综合模糊数的上限值,li和lj表示第i和j个指标下综合模糊数的下限值。
[0218]
基于熵权法计算各部分内部的评价指标之间的客观权重系数,具体为:
[0219]
首先,基于标准化处理后各候选方案的所有评价指标得分值,建立初始数据矩阵r
m
×
n
:
[0220][0221]
式中,m表示候选方案的数量;n表示所包含的评价指标的数量;d
ij
为标准化处理后第i个候选方案的第j个评价指标的得分值。
[0222]
其次,计算各项评价指标的信息熵e
j
:
[0223][0224]
式中,p
ij
表示第j个评价指标在第i个候选方案数据下占所有候选方案数据之和的比重,具体计算如下:
[0225][0226]
最后,计算各部分内部的评价指标间的客观权重系数:
[0227][0228]
式中,w
entropy_index_rj
为r所代表部分内部的第j个评价指标的客观权重系数;r的取值范围为{1,2,3,4},分别表示经济性、动力性、可靠性和舒适性四部分;num_r为r所代表部分内部的评价指标的数量;w
entropy_rj
为r所代表部分内部的第个评价指标的客观权重系数初值,具体计算如下:
[0229][0230]
根据各部分内部的评价指标之间的主观权重系数和客观权重系数,计算各部分内部的评价指标之间的权重系数,具体为:
[0231][0232]
式中,w
rule_index_rj
表示r所代表部分内部的第j个评价指标的权重系数;w
fahp_index_rj
表示基于模糊层次分析法得出的r所代表部分内部的第j个评价指标的主观权重系数;w
entropy_index_rj
表示基于熵权法得出的r所代表部分内部的第j个评价指标的客观权重系数;num_r表示r所代表部分内部的评价指标的数量。
[0233]
将经济性部分、动力性部分、可靠性部分和舒适性部分视为四个特殊的评价指标,基于模糊层次法计算这四个部分之间的权重系数w
target_rule_r
。
[0234]
根据四个部分之间的权重系数和各部分内部的评价指标之间的权重系数,计算所有评价指标的综合权重系数,具体计算如下:
[0235][0236]
式中,w
target_index_rj
为r所代表部分内部的第j个评价指标的综合权重系数;num_rule=4;w
rj
为r所代表部分内部的第j个评价指标的原始综合权重值,具体计算如下:
[0237]
w
rj
=w
target_rule_r
w
rule_index_rj
[0238]
根据灰色关联度系数和所有评价指标之间的综合权重系数,计算灰色关联度,并选取灰色关联度最大的候选方案作为最佳方案,灰色关联度的计算公式具体为:
[0239]
[0240]
其中,ρ
i
为第i个候选方案与理想参考序列的灰色关联度,γ(r
ip
,r
0,p
)表示第i个候选方案的第p个评价指标与理想参考序列的灰色关联系数,w
target_index_rj
为部分r内部的第j个评价指标的综合权重系数,部分r为经济性部分、动力性部分、可靠性部分和舒适性部分中任一个部分,随着p值的变化,第j个评价指标也发生相应变化,以保证第j个评价指标与第p个评价指标相一致。
[0241]
选取灰色关联度最大的候选方案为候选方案集中的最佳方案。
[0242]
步骤s5包括以下步骤:
[0243]
s51:自初步优化构型库中选取一个初步优化构型作为待优化构型,随机初始化生成粒子群中各粒子的速度和初始位置,其中,粒子的不同位置表示构型参数不同取值的组合,将粒子群中各粒子的初始位置记为各粒子的个体最优位置,并分别生成各个粒子的个体最优位置集,所述个体最优位置集为空集;
[0244]
s52:获取各粒子的个体当前位置和各粒子的个体最优位置集,分别构建各粒子的粒子候选方案集,所述粒子候选方案集包括粒子的个体当前位置和粒子的个体最优位置集,分别使用候选方案集筛选模块对各粒子的粒子候选方案集进行筛选,将各粒子的个体最优位置更新为筛选结果;
[0245]
s53:获取各粒子的个体最优位置,在各粒子的个体最优位置集中添加各粒子的个体最优位置,并构建粒子群候选方案集,所述粒子群候选方案集包括各粒子的个体最优位置,使用候选方案集筛选模块对粒子群候选方案集进行筛选,将筛选结果作为群体最优位置;
[0246]
s54:根据群体最优位置和各粒子的个体最优位置,更新各粒子的速度和位置;
[0247]
具体计算如下:
[0248]
v
i
(t+1)=w
×
v
i
(t)+c1×
r1×
(pbest
i-x
i
(t))+c2×
r2×
(gbest-x
i
(t))
[0249]
x
i
(t+1)=x
i
(t)+h0(1-t/t
max
)v
i
(t+1)
[0250]
式中,t为当前迭代次数;w为惯性权重;r1和r2为0到1之间的随机数;c1为个体学习因子,c2为社会学习因子,均取为2;h0为飞行常数,取为0.5;i表示粒子;v
i
为粒子速度;x
i
为粒子位置;pbest
i
为粒子个体最优位置;gbest为群体最优位置。
[0251]
s55:重复步骤s52,直至执行次数大于预设置的优化迭代次数阈值或群体最优位置达到稳定状态,所述群体最优位置达到稳定状态具体为在kp(kp≥2)次迭代中群体最优位置所代表的各个构型参数的变化误差均小于预设置的优化稳定阈值minp;优化迭代次数阈值、kp和优化稳定阈值minp的取值是根据构型的复杂度、优化的精度需求所确定的。
[0252]
s56:记录群体最优位置,将待优化构型的构型参数组合更新为群体最优位置所代表的构型参数组合,得到待优化构型的优化构型;
[0253]
s57:重复步骤s51,直至得到初步优化构型库中所有初步优化构型的优化构型。
[0254]
步骤s6包括以下步骤:
[0255]
s61:获取所有的优化构型,构建最终候选方案集,最终候选方案集包括所有的优化构型;
[0256]
s62:使用候选方案集筛选模块对最终候选方案集进行筛选,将筛选结果作为最优构型;
[0257]
s63:记录最优构型的构型方案和构型参数组合,构型方案包括部件连接关系、离
合器安装位置。
[0258]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1