一种电动吊车的动力电源系统的制作方法
[0001]
本发明涉及电动吊车技术领域,具体涉及一种电动吊车的动力电源系统。
背景技术:
[0002]
吊车是起重机的俗称,起重机是起重机械的一种,是一种作循环、间歇运动的机械,广泛用于港口、车间、电力、工地等地方。一个工作循环包括:取物装置从取物地把物品提起,然后水平移动到指定地点降下物品,接着进行反向运动,使取物装置返回原位,以便进行下一次循环。
[0003]
随着电动化技术的不断发展,电动吊车已经被广泛应用,然而电动吊车的动力电池系统在工作中存在一定的故障风险。当动力电池系统故障时,吊车既不能举升、也不能行驶,当吊车的臂架没有伸出时,可以使用拖车将其拖走维修,而当吊车的臂架伸出时,避免臂架对行驶路径中的建筑物及其他设备造成损坏,通常只能等待维修人员到现场进行维修。这样既降低了吊车的使用效率,同时因为吊车停止工作且阻碍其他设备的工作,进一步降低了其他设备的工作效率。
技术实现要素:
[0004]
有鉴于此,本发明实施例致力于提供一种电动吊车的动力电源系统,通过并行设置动力电池和应急电源,并在动力电池故障时,整车控制单元切断动力电池的输出线路并导通应急电源的输出线路,利用应急电源来提供电动吊车举升操作或行驶操作所需的电能,可以实现电动吊车的紧急缩回和俯下臂架、释放负载且自行行驶至空旷处或维修处,避免电动吊车上载有负载或臂架未缩回和俯下而不能移动,也能够避免电动吊车阻碍其他设备的正常工作。
[0005]
本发明一实施例提供的一种电动吊车的动力电源系统,包括:动力电池,所述动力电池构造为提供所述电动吊车举升操作和行驶操作所需的电能;应急电源,所述应急电源与所述动力电池并行设置,所述应急电源构造为在所述动力电池故障时提供所述电动吊车举升操作或行驶操作所需的电能;以及整车控制单元,所述整车控制单元与所述动力电池、所述应急电源通讯连接,在所述动力电池故障时,所述整车控制单元切断所述动力电池的输出线路并导通所述应急电源的输出线路。
[0006]
在一实施例中,所述动力电源系统进一步包括:高压箱,设置在所述动力电池、所述应急电源与驱动部件之间,与所述整车控制单元通讯连接;其中,所述高压箱构造为切断或导通所述动力电池与所述驱动部件,和/或切断或导通所述应急电源与所述驱动部件。
[0007]
在一实施例中,所述驱动部件包括:举升电机及对应的举升电机控制器,构造为实现所述举升操作;行驶电机及对应的行驶电机控制器,构造为实现所述行驶操作的;以及辅助电机及对应的辅助电机控制器,构造为辅助所述举升操作和所述行驶操作的。
[0008]
在一实施例中,所述高压箱包括:第一开关,设置于所述动力电池的正极与所述行驶电机控制器的正极、所述举升电机控制器的正极、所述辅助电机控制器的正极之间,第二
开关,设置于所述动力电池的负极与所述行驶电机控制器的负极、所述举升电机控制器的负极、所述辅助电机控制器的负极之间,第三开关,设置于所述应急电源的正极与所述行驶电机控制器的正极、所述举升电机控制器的正极、所述辅助电机控制器的正极之间,以及第四开关,设置于所述应急电源的负极与所述行驶电机控制器的负极、所述举升电机控制器的负极、所述辅助电机控制器的负极之间。
[0009]
在一实施例中,所述高压箱包括:第五开关,设置于所述应急电源的正极与所述行驶电机控制器的正极之间;第六开关,设置于所述应急电源的正极与所述举升电机控制器的正极之间;以及第七开关,设置于所述应急电源的正极与所述辅助电机控制器的正极之间。
[0010]
在一实施例中,所述整车控制单元进一步构造为:控制所述第五开关和所述第六开关中最多只有一个导通。
[0011]
在一实施例中,所述控制所述第五开关和所述第六开关中最多只有一个导通包括:控制所述第六开关导通且所述第五开关断开,执行所述电动吊车的举升操作;以及控制所述第五开关导通且所述第六开关断开,执行所述电动吊车的行驶操作。
[0012]
在一实施例中,所述第一开关、所述第二开关、所述第三开关、所述第四开关、所述第五开关、所述第六开关、所述第七开关中的部分或全部包括继电器。
[0013]
在一实施例中,所述举升电机构造为:在所述第三开关、所述第四开关和所述第六开关导通时,驱动所述电动吊车的臂架执行缩回和俯下动作。
[0014]
在一实施例中,所述驱动所述电动吊车的臂架执行缩回和俯下动作包括:当所述电动吊车的臂架处于伸出状态时,所述举升电机驱动所述电动吊车的臂架执行缩回动作;以及当所述电动吊车的臂架处于举升状态时,所述举升电机驱动所述电动吊车的臂架执行俯下动作。
[0015]
在一实施例中,所述举升电机构造为:驱动所述电动吊车的臂架以第一预设速度执行缩回和俯下动作。
[0016]
在一实施例中,所述举升电机控制器和所述行驶电机控制器构造为:在所述第三开关和所述第四开关导通时,停止能量回收。
[0017]
在一实施例中,所述行驶电机构造为:驱动所述电动吊车以第二预设速度执行行驶动作。
[0018]
在一实施例中,所述辅助电机构造为:驱动所述电动吊车的吊具执行旋转、伸出、缩回、解锁和闭锁动作,或驱动所述电动吊车的转向桥执行转向动作。
[0019]
在一实施例中,所述辅助电机构造为:当所述第七开关导通时,所述辅助电机驱动所述电动吊车的吊具执行旋转、伸出、缩回、解锁和闭锁动作;以及当所述第七开关导通时,所述辅助电机驱动所述电动吊车的转向桥执行转向动作。
[0020]
在一实施例中,所述应急电源包括增程器。
[0021]
本发明实施例提供的一种电动吊车的动力电源系统,通过并行设置动力电池和应急电源,并在动力电池故障时,整车控制单元切断动力电池的输出线路并导通应急电源的输出线路,利用应急电源来提供电动吊车举升操作或行驶操作、以及转向桥和吊具操作所需的电能,可以实现电动吊车的紧急缩回和俯下臂架、释放负载且自行行驶至空旷处或维修处,避免电动吊车上载有负载或臂架未缩回和俯下而不能移动,也能够避免电动吊车阻
碍其他设备的正常工作。
附图说明
[0022]
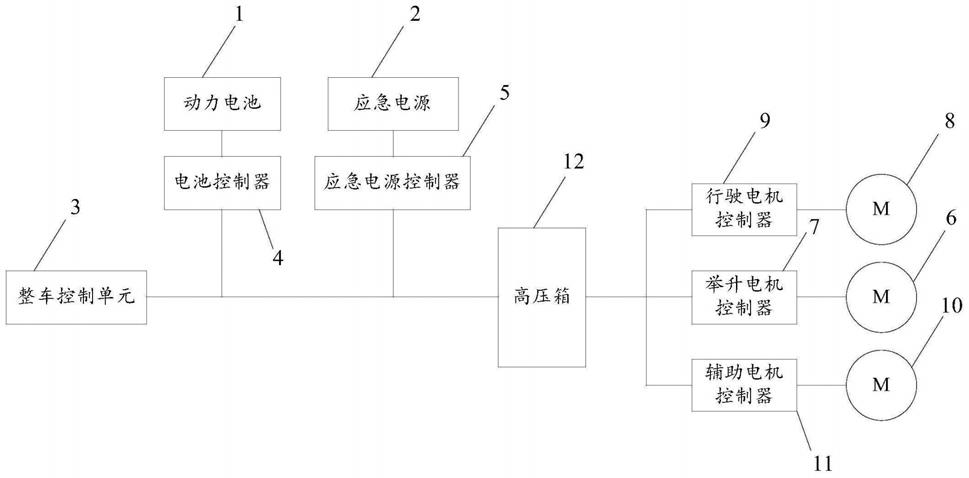
图1所示为本申请一实施例提供的一种电动吊车的动力电源系统的框架结构示意图。
[0023]
图2所示为本申请另一实施例提供的一种电动吊车的设备结构示意图。
[0024]
图3所示为本申请一实施例提供的一种电动吊车的动力电源系统的电路结构示意图。
[0025]
图4所示为本申请一实施例提供的一种电动吊车的动力电源系统的工作流程示意图。
具体实施方式
[0026]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0027]
此外,在示例性实施例中,因为相同的参考标记表示具有相同结构的相同部件或相同方法的相同步骤,如果示例性地描述了一实施例,则在其他示例性实施例中仅描述与已描述实施例不同的结构或方法。
[0028]
在整个说明书及权利要求书中,当一个部件描述为“连接”到另一部件,该一个部件可以“直接连接”到另一部件,或者通过第三部件“电连接”到另一部件。此外,除非明确地进行相反的描述,术语“包括”及其相应术语应仅理解为包括所述部件,而不应该理解为排除任何其他部件。
[0029]
图1所示为本申请一实施例提供的一种电动吊车的动力电源系统的框架结构示意图。如图1所示,该动力电源系统包括:动力电池1、应急电源2以及整车控制单元3;其中,动力电池1用于提供电动吊车臂架动作、吊具动作、行驶和转向动作所需的电能,应急电源2与动力电池1并行设置,应急电源2用于在动力电池1故障时提供电动吊车臂架动作、吊具动作、行驶和转向动作所需的电能,整车控制单元3与动力电池1、应急电源2通讯连接,在动力电池1故障时,整车控制单元3切断动力电池1的输出线路并导通应急电源2的输出线路。电动吊车的动力源通常为动力电池,而动力电池是通过输出线路输出电能来驱动电动吊车的臂架动作、吊具动作、行驶和转向动作,而动力电池和输出线路都存在一定的故障风险,当动力电池的输出出现故障时,电动吊车不仅不能进行举升操作,也不能实现行驶动作,从而导致电动吊车瘫痪在现场。为了解决该问题,本申请实施例提出了一种电动吊车的动力系统,通过与动力电池1并行设置应急电源2,在动力电池1不能输出电能时应急电源2提供所需要的电能,可以实现电动吊车的应急臂架动作、吊具动作、行驶和转向动作等操作,同时可以实现电动吊车自行行驶至空旷处或维修处,提高了维修效率且不会对其他设备的正常工作造成影响。在一实施例中,应急电源2可以是增程器。由于电池等电源也存在与动力电池1相同的故障风险,并且还存在受到动力电池1影响的风险,因此,本申请实施例将应急电源2设置为相对可靠性更高且与动力电池1相干性较低的增程器,以保证动力电池1故障时
有可靠的动力源。同时,可以利用增程器给动力电池1补充电能,以延长动力电池1的供电能力,只需要保留一定的的应急能量即可;或者在动力需求过大时,也可以利用增程器和动力电池1共同驱动。应当理解,本申请实施例可以根据实际应用场景的需求而选取不同的应急电源类型,例如电池、超级电容等,只要所选取的应急电源类型可以提供电动吊车所需的应急电能即可,本申请实施例对于应急电源的具体类型不做限定。在一实施例中,增程器可以包括发动机和发电机。在进一步的实施例中,发电机可以包括一体式启动发电机,即isg电机(integrated starter generator)。应当理解,本申请实施例可以根据实际应用场景的需求而选取不同的增程器结构和对应的发电机类型,例如bsg电机等,只要所选取的增程器结构和对应的发电机类型可以提供电动吊车所需的电能即可,本申请实施例对于增程器的具体结构和对应发电机的具体类型不做限定。
[0030]
在一实施例中,如图1所示,本申请实施例中的动力电源系统还可以包括电池控制器4、应急电源控制器5,其中,电池控制器4与动力电池1连接,用于控制动力电池1的电能输出,应急电源控制器5与应急电源2连接,用于控制应急电源2的工作。通过设置电池控制器4、应急电源控制器5,可以更好的控制动力电池1和应急电源2的工作。应当理解,本申请实施例中的电池控制器4、应急电源控制器5可以分别集成在动力电池1和应急电源2中,本申请实施例对于电池控制器4、应急电源控制器5的具体位置不做限定。
[0031]
本发明实施例提供的一种电动吊车的动力电源系统,通过并行设置动力电池和应急电源,并在动力电池故障时,整车控制单元切断动力电池的输出线路并导通应急电源的输出线路,利用应急电源来提供电动吊车举升操作或行驶操作所需的电能,可以实现电动吊车的紧急缩回和俯下臂架、释放负载且自行行驶至空旷处或维修处,避免电动吊车上载有负载或臂架未缩回和俯下而不能移动,也能够避免电动吊车阻碍其他设备的正常工作。
[0032]
在一实施例中,如图1所示,动力电池1、应急电源2与驱动部件之间可以设置高压箱12,并且高压箱12与整车控制单元3通讯连接,高压箱12切断或导通动力电池1与驱动部件,和/或切断或导通应急电源2与驱动部件。即通过设置高压箱12,整车控制单元3可以通过控制高压箱12来实现动力电池1与驱动部件的切断或导通,从而实现动力电池1提供驱动部件驱动电动吊车臂架动作、吊具动作、行驶和转向动作所需的电能;整车控制单元3还可以通过控制高压箱12来实现应急电源2与驱动部件的切断或导通,从而实现应急电源2提供驱动部件驱动电动吊车举升操作和行驶操作所需的电能。在一实施例中,如图1所示,驱动部件可以包括实现举升操作的举升电机6及对应的举升电机控制器7、实现行驶操作的行驶电机8及对应的行驶电机控制器9、辅助举升操作和行驶操作实现吊具动作、转向动作的辅助电机10及对应的辅助电机控制器11。设置举升电机6及对应的举升电机控制器7可以实现电动吊车的臂架的操作;设置行驶电机8及对应的行驶电机控制器9可以实现电动吊车的行驶操作;设置辅助电机10及对应的辅助电机控制器11,可以驱动电动吊车的吊具执行旋转、伸出、缩回、解锁和闭锁等动作,或驱动电动吊车的转向桥在行驶过程中执行转向动作,即辅助电机10及对应的辅助电机控制器11实现吊具机构、转向机构的操作。在一实施例中,整车控制单元3与电池控制器4、应急电源控制器5、行驶电机控制器9、举升电机控制器7、辅助电机控制器11之间通过can总线实现通讯连接。
[0033]
图2所示为本申请另一实施例提供的一种电动吊车的设备结构示意图。如图2所示,行驶电机8通过传动轴13与驱动桥14连接,以驱动电动吊车整车行驶;举升电机6通过依
次连接的举升油泵15、举升油缸16与臂架执行机构17连接,以驱动臂架执行机构17执行臂架的举升、俯下、伸出和缩回等操作;辅助电机10连接辅助油泵18,并且辅助油泵18分别通过转向油缸19、吊具油缸组20分别与转向桥21和吊具执行机构22连接,以分别实现电动吊车的转向操作和吊具动作。
[0034]
图3所示为本申请一实施例提供的一种电动吊车的动力电源系统的电路结构示意图。如图3所示,高压箱12可以包括设置于动力电池1的正极与行驶电机控制器9的正极、举升电机控制器7的正极、辅助电机控制器11的正极之间的第一开关23,高压箱12还可以包括设置于动力电池1的负极与行驶电机控制器9的负极、举升电机控制器7的负极、辅助电机控制器11的负极之间的第二开关24,高压箱12还可以包括设置于应急电源2的正极与行驶电机控制器9的正极、举升电机控制器7的正极、辅助电机控制器11的正极之间的第三开关25,高压箱包括12还可以设置于应急电源2的负极与行驶电机控制器9的负极、举升电机控制器7的负极、辅助电机控制器11的负极之间的第四开关26。通过设置第一开关23和第二开关24,可以实现动力电池1与行驶电机控制器9的正极、举升电机控制器7的正极、辅助电机控制器11的正极之间的导通和断开;通过设置第三开关25和第四开关26,可以实现应急电源2与行驶电机控制器9的正极、举升电机控制器7的正极、辅助电机控制器11的正极之间的导通和断开。
[0035]
在一实施例中,如图3所示,高压箱12还可以包括设置于应急电源2的正极与行驶电机控制器9的正极之间的第五开关27、设置于应急电源2的正极与举升电机控制器7的正极之间的第六开关28、设置于应急电源2的正极与辅助电机控制器11的正极之间的第七开关29。具体的,第五开关27位于第一开关23、第三开关25与行驶电机控制器9之间,第六开关28位于第一开关23、第三开关25与举升电机控制器7之间,第七开关27位于第一开关23、第三开关25与辅助电机控制器11之间。通过设置第五开关27、第六开关28和第七开关29,可以根据需求分别驱动行驶电机8、举升电机6和辅助电机10。
[0036]
图4所示为本申请一实施例提供的一种电动吊车的动力电源系统的工作流程示意图。如图4所示,上述实施例中的电动吊车的动力电源系统的应急模式可以包括如下步骤:
[0037]
步骤410:断开动力电池并启动应急电源。
[0038]
具体的,当动力电池1出现故障时,电池控制器4向整车控制单元3发出故障信号,整车控制单元3控制高压箱12中的第一开关23和第二开关24断开,从而断开动力电池1与驱动部件之间的连接。整车控制单元3控制导通第三开关25和第四开关26,以导通应急电源2与驱动部件之间的连接,由应急电源2提供电动吊车所需要的电能。在一实施例中,整车控制单元3根据实际需求发送所需要的电功率值给应急电源控制器5,应急电源控制器5控制应急电源2(增程器)的发电功率,从而保证电动吊车的驱动需求。
[0039]
步骤420:获取臂架的当前状态。
[0040]
由于电动吊车的动力电池1故障时,电动吊车可能正处于工作状态,因此,其臂架和吊具有可能是处于伸出状态或者抓举状态。此时,若直接将电动吊车驾驶离开,则其臂架和吊具有可能会与其他物体发送碰撞,并且其抓举的货物也会影响其行驶、也增加了行驶的负载,因此,需要首先获知臂架的当前状态,并根据其状态执行后续操作。
[0041]
步骤430:当臂架的当前状态为伸出或举升状态时,缩回或俯下臂架。
[0042]
当臂架和吊具上抓举有货物(例如集装箱)时,则缩回和俯下臂架后将货物解锁并
放置于安全位置后,将臂架和对应的吊具缩回和俯下至收纳状态;当臂架和吊具上未抓举货物时,直接将臂架和对应的吊具缩回和俯下至收纳状态。具体的,整车控制单元3控制导通第六开关28和/或第七开关29,由应急电源2提供电能给举升电机6和辅助电机10,以实现举升电机6和辅助电机10对臂架和对应的吊具执行缩回和俯下操作。
[0043]
步骤440:当臂架的当前状态为收纳状态时,驱动电动吊车。
[0044]
当臂架的当前状态为收纳状态时,说明此时可以将电动吊车转移至维修点进行维修,此时,由应急电源2提供驱动电动吊车所需的电能给行驶电机8和辅助电机10,以实现行驶电机8和辅助电机10将电动吊车行驶至空旷位置或维修点进行维修,避免电动吊车阻碍其他工作,且提高了维修效率。当电动吊车到达维修点后,依次断开第第五开关27、第六开关28、第七开关29、第三开关25和第四开关26,即断开高压箱12,实现高压下电,避免高压对维修人员造成的安全威胁。
[0045]
在一实施例中,整车控制单元3控制第五开关27和第六开关28中最多只有一个导通,即上述步骤430和步骤440不能同时执行。具体的,当动力电池1故障时,整车控制单元3首先控制第六开关28导通且断开第五开关27,由应急电源2提供电能给举升电机6实现臂架的缩回和俯下操作;在完成了臂架的缩回和俯下操作后,整车控制单元3控制第五开关27导通且断开第六开关28,由应急电源2提供电能给行驶电机8实现电动吊车的行驶操作,以将电动吊车移动至维修点处进行维修。当然,在实际应用中也可以根据需求来调整第五开关27和第六开关28的导通顺序,例如当人为判断电动吊车的臂架处于收纳状态,此时可以手动调整以导通第五开关27且断开第六开关28,直接执行行驶操作,从而可以提高维修效率。应当理解,在电动吊车到达维修点处后,整车控制单元3可以断开第五开关27和第六开关28,以避免行驶电机8和举升电机6的误动作。通过设置第五开关27和第六开关28不同时导通,可以避免在动力电池1故障时举升动作和行驶动作的同步进行,从而避免电动吊车的需求功率和电流较大而导致应急电源2的输出电能不足,以保证应急电源2的输出电能满足应急需求。
[0046]
在一实施例中,第一开关23、第二开关24、第三开关25、第四开关26、第五开关27、第六开关28、第七开关29中的部分或全部可以包括继电器。通过设置继电器开关,可以快速响应切断和导通操作,从而实现无缝切换。应当理解,本申请实施例可以根据实际应用场景的需求而选取不同的开关类型,只要所选取的开关类型满足快速响应的需求即可,本申请实施例对于各个开关的具体类型不做限定。
[0047]
在一实施例中,第三开关25、第四开关26和第六开关28导通时,举升电机6可以驱动电动吊车的臂架执行缩回和俯下动作。在第三开关25、第四开关26和第六开关28导通时,此时是应急电源2在提供电动吊车所需的电能,为了尽量减少应急电源2的能耗,本申请实施例限制举升电机6的伸出和举升动作,即在应急工况下,只在电动吊车的臂架处于伸出状态时将其缩回和俯下,而不再将臂架伸出和举升,以快速完成缩回和俯下臂架的操作后将电动吊车移动至维修处。具体的,当电动吊车的臂架处于伸出状态时,举升电机6驱动电动吊车的臂架执行缩回动作;当电动吊车的臂架处于举升状态时,举升电机6驱动电动吊车的臂架执行俯下动作,从而缩回和俯下电动吊车的臂架。在进一步的实施例中,举升电机6驱动电动吊车的臂架以第一预设速度执行缩回和俯下动作。通过设置第一预设速度,举升电机6以第一预设速度驱动电动吊车的臂架执行缩回和俯下动作,可以尽量降低举升电机6的
能耗,从而为后续电动吊车行驶提供更多的电能,避免行驶过程中电能不足的问题。
[0048]
在一实施例中,第三开关25和第四开关26导通时,举升电机控制器7和行驶电机控制器9停止能量回收。为了节省能源,电动吊车中可能在臂架回收过程中和行驶过程中设置有制动能量回收模式,以将过剩的动能转化为电能存储在动力电池1中,而当第三开关25和第四开关26导通时,说明此时动力电池1存在故障,此时停止能量回收可以避免产生回馈电流对线路中的元器件造成损耗。应当理解,当应急电源2为增程器时,应急电源2是不能回收能量的,也就是说,动力电池1故障时,即停止能量回收。
[0049]
在一实施例中,行驶电机8驱动电动吊车可以以第二预设速度执行行驶动作。通过设置第二预设速度,行驶电机8以第二预设速度驱动电动吊车行驶,可以尽量降低行驶电机8的能耗,避免行驶过程中电能不足的问题。在一实施例中,当电动吊车行驶至维修处后,应急电源2中的增程器停止发电,并且高压箱12中的第一开关23、第二开关24、第三开关25、第四开关26、第五开关27、第六开关28、第七开关29全部断开,以避免维修过程中对维修人员造成伤害。
[0050]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
- 电极用合金粉末、使用了其的镍氢蓄电池用负极及镍氢蓄电池的制造方法与工艺
- 一种可移动的LNG压差充装装置及其使用方法与制造工艺
- 一种硅溶胶协同聚合物增强强度的静电纺电容器隔膜材料的制造方法与工艺
- 煤灰-NCM三元复合正极材料、制备及其浆料的制备的制造方法与工艺
- 一种用于钠离子电池的棒状NiTiO3负极材料、制备及应用的制造方法与工艺
- 一种超级电容器3D氧化铁/石墨烯复合电极材料的制备方法与制造工艺
- 一种二氧化锰包覆空心碳球及其制备方法和应用与制造工艺
- 用于启动安全壳冷却系统的非能动自动控制系统的制造方法与工艺
- 含多分布式电源配电网的电动汽车充电站优化配置方法与制造工艺
- 一种移动式混凝土搅拌车熄火卸料控制系统及控制方法与制造工艺