一种基于制动强度的纯电动汽车制动力修正方法与流程
[0001]
本发明涉及纯电动汽车制动能量回收技术领域,更确切地说,本发明涉及一种基于制动强度的纯电动汽车制动力修正方法。
背景技术:
[0002]
在全球不可再生资源日益短缺的大背景下,纯电动汽车的制动能量回收技术越来越受到重视,利用该技术可以有效的提高车辆的续驶里程并提高节能效果,不同于传统制动系统的是,制动能量回收系统的制动力由电机和液压共同提供,并且其作用于车轮的制动力与踏板开度之间是解耦的,因此在一定的踏板开度下,由制动力分配方法确定的目标制动力与执行元件实际控制效果之间存在一定的不确定性,在实际制动过程中常常会出现制动不足或制动过度等现象,会影响制动安全性和制动感觉,因此有必要在原有制动力分配方法基础上提出一种制动力修正方法,在制动过程中实时修正目标制动力,以获得更好的制动效果。
[0003]
对于现有制动能量回收系统,典型制动力分配方法主要包括两种:
[0004]
1.并联制动力分配方法
[0005]
在传统前后轴液压制动力按固定比例分配基础上,在电机驱动轴叠加电机再生制动力,仅适用于小强度制动,能量回收效果有限且易影响制动感觉。
[0006]
2.串联制动力分配方法
[0007]
在能够获得驾驶员制动意图及独立调节各车轮液压制动力基础上,协调控制液压与电机制动力,提高能量回收效果,包括以下几种典型方式:
[0008]
(1)基于β线制动力分配方法
[0009]
该方法仍保证前后轴制动力按固定比值分配,其中电机驱动轴制动力由电机优先,液压补偿方式提供,能量回收效果仍较为有限。
[0010]
(2)基于i线制动力分配方法
[0011]
该方法保证前后轴制动力按理想制动力分配曲线分配,能量回收效果好,但对制动系统硬件要求高,且控制较为复杂,容易影响制动安全。
[0012]
(3)基于ece法规下线制动力分配方法
[0013]
适用于前驱车型,可将尽量多制动力分配给驱动轴,能量回收效果好,但不能很好平衡制动安全性与能量回收效果。
[0014]
对于以上所总结制动力分配方法均类似于前馈控制,其控制目标均为制动力分配方法所得到的目标制动力,并未考虑在实际制动过程中,若其控制效果不理想应如何对制动力进行修正。
技术实现要素:
[0015]
本发明目的在于克服由于纯电动汽车制动系统的车轮制动力与踏板开度解耦,使得现有制动力分配方法所确定的目标制动力与执行元件实际控制效果之间具有一定不确
定性,在实际制动过程中常常会出现制动不足或制动过度等现象,从而影响制动安全性和制动感觉的问题,因此本发明提出一种基于制动强度的纯电动汽车制动力修正方法,以由车辆载荷确定的目标制动强度边界范围作为约束条件,通过车辆实际的制动强度反馈信号进行偏差判定,再利用增量式pid算法对目标制动力进行实时修正。
[0016]
为实现上述目的,提供以下技术方案:
[0017]
一种基于制动强度的纯电动汽车制动力修正方法,其特征在于,包括以下步骤:
[0018]
步骤一:输入前一时刻总需求制动力并根据车辆载荷确定目标制动强度边界约束条件;
[0019]
步骤二:输入此时车辆实际制动强度以及步骤一输出的目标制动强度边界约束条件,以确定制动强度偏差;
[0020]
步骤三:输入步骤二输出的制动强度偏差,利用增量式pid控制器计算所需实时修正的制动力;
[0021]
步骤四:输出此时制动能量回收系统所需实时修正的制动力δf
b
。
[0022]
进一步地,步骤一进行目标制动强度边界约束条件的确定,包括:
[0023]
根据汽车理论,制动减速度j与制动强度z满足关系式如下:
[0024]
j=z
·
g
[0025]
进一步地,制动系统总制动力f
total
表达式如下:
[0026]
f
total
=m
·
j=g
·
z
[0027]
进一步地,根据上式,车辆制动减速度不仅与总制动力相关,同时还受车辆载荷影响,当车辆载荷在满载和空载之间变化时,制动强度也在一定区间内变化,利用这一特征,根据前一时刻总需求制动力与车辆载荷,可确定目标制动强度边界约束条件[z
trgt_min
,z
trgt_max
],表达式如下:
[0028][0029]
其中:f
total
(n-1)表示前一时刻总需求制动力,g
m
表示车辆满载重量,g
k
表示车辆空载重量。
[0030]
进一步地,步骤二进行制动强度偏差确定,包括如下步骤:
[0031]
1.输入此时实际车辆制动强度z
est
,目标制动强度边界约束条件[z
trgt_min
,z
trgt_max
];
[0032]
2.判断此时实际车辆制动强度z
est
是否处于目标制动强度边界约束条件范围内,若此时实际车辆制动强度z
est
大于目标制动强度边界约束条件下限值z
trgt_min
,进入步骤3,否则说明此时实际车辆制动强度z
est
不处于目标制动强度边界约束条件范围内,得到制动强度偏差δz=z
trgt_min-z
est
;
[0033]
3.判断此时实际车辆制动强度z
est
是否小于目标制动强度边界约束条件上限值z
trgt_max
,若是则说明此时实际车辆制动强度z
est
处于目标制动强度边界约束条件范围内,此时制动强度偏差δz=0,否则说明此时实际车辆制动强度z
est
不处于目标制动强度边界约束条件范围内,得到制动强度偏差为δz=z
trgt_max-z
est
;
[0034]
4.输出制动强度偏差δz;
[0035]
其中实际车辆制动强度z
est
=j
est
/g,j
est
为车辆制动减速度,由纵向加速度传感器得到。
[0036]
进一步地,根据步骤二确定的制动强度偏差δz,步骤三通过增量式pid控制器计算所需实时修正的制动力δf
b
,包括:
[0037]
控制器第k个采样时刻的输出值为:
[0038][0039]
进一步地,根据上式得到增量式pid控制算法为:
[0040]
δf
b
=f
b
(k)-f
b
(k-1)
[0041]
进一步地,得到所需实时修正的制动力δf
b
详细表达式为:
[0042]
δf
b
=k
p
[δz(k)-δz(k-1)+k
i
δz(k)+k
d
(δz(k)-2δz(k-1)+δz(k-2))]
[0043]
=k
p
(1+k
i
+k
d
)δz(k)-k
p
(1+2k
d
)δz(k-1)+k
p
k
d
δz(k-2)
[0044]
=aδz(k)-bδz(k-1)+cδz(k-2)
[0045]
其中a、b、c均为控制参数,分别为:
[0046]
a=k
p
(1+k
i
+k
d
)
[0047]
b=-k
p
(1+2k
d
)
[0048]
c=k
p
k
d
[0049]
进一步地,步骤四输出此时制动能量回收系统所需实时修正的制动力δf
b
。
[0050]
与现有发明相比本发明的有益效果是:
[0051]
1.本发明所述的一种基于制动强度的纯电动汽车制动力修正方法,将制动强度作为重要反馈环节,对目标制动力进行实时修正,克服了由于纯电动汽车制动系统踏板开度与车轮制动力解耦所导致的原制动分配算法所确定目标制动力与执行机构实际控制效果之间的不确定性,使得制动强度不稳定因素增多等问题,保证了实际的制动强度始终处于由车辆载荷所确定的目标制动强度边界条件范围内,同时满足传统驾驶习惯要求;
[0052]
2.本发明所述的一种基于制动强度的纯电动汽车制动力修正方法,采用了增量式pid算法进行制动力的修正,算法实时性良好,同时可以减小误动作影响。
附图说明
[0053]
下面结合附图对本发明作进一步说明:
[0054]
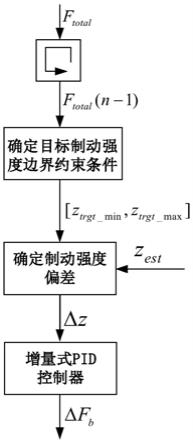
图1是本发明所述的一种基于制动强度的纯电动汽车制动力修正方法的整体结构图;
[0055]
图2是本发明所述的一种基于制动强度的纯电动汽车制动力修正方法的载荷影响下制动力与制动强度关系曲线图;
[0056]
图3是本发明所述的一种基于制动强度的纯电动汽车制动力修正方法的确定制动强度偏差流程图。
具体实施方式
[0057]
下面结合附图对本发明作进一步的说明,以便本领域的技术人员更好地理解本发
明。
[0058]
本发明针对由于纯电动汽车制动系统的车轮制动力与踏板开度解耦,使得现有制动力分配方法所确定的目标制动力与执行元件实际控制效果之间具有一定的不确定性,在实际制动过程中常常会出现制动不足或制动过度等现象,从而影响制动安全性和制动感觉的问题,本发明提出一种基于制动强度的纯电动汽车制动力修正方法,以由车辆载荷确定的目标制动强度边界范围作为约束条件,通过车辆实际的制动强度反馈信号进行偏差判定,再利用增量式pid算法对目标制动力进行实时修正。
[0059]
本发明所述的一种基于制动强度的纯电动汽车制动力修正方法,参阅图1,包括以下步骤:
[0060]
步骤一:输入前一时刻总需求制动力并根据车辆载荷确定目标制动强度边界约束条件;
[0061]
步骤二:输入此时车辆实际制动强度以及步骤一输出的目标制动强度边界约束条件,以确定制动强度偏差;
[0062]
步骤三:输入步骤二输出的制动强度偏差,利用增量式pid控制器计算所需实时修正的制动力;
[0063]
步骤四:输出此时制动能量回收系统所需实时修正的制动力δf
b
。
[0064]
步骤一进行目标制动强度边界约束条件的确定,包括:
[0065]
根据汽车理论,制动减速度j与制动强度z满足关系式如下:
[0066]
j=z
·
g
[0067]
制动系统总制动力f
total
表达式如下:
[0068]
f
total
=m
·
j=g
·
z
[0069]
根据上式,车辆制动减速度不仅与总制动力相关,同时还受车辆载荷影响,参阅图2,当车辆载荷在满载和空载之间变化时,制动强度也在一定区间内变化,利用这一特征,根据前一时刻总需求制动力与车辆载荷,可确定目标制动强度边界约束条件[z
trgt_min
,z
trgt_max
],表达式如下:
[0070][0071]
其中:f
total
(n-1)表示前一时刻总需求制动力,g
m
表示车辆满载重量,g
k
表示车辆空载重量;
[0072]
需保证车辆的制动强度不超出范围[z
trgt_min
,z
trgt_max
],否则会出现制动不足或制动过度,影响制动安全性和制动感觉。
[0073]
参阅图3,步骤二进行制动强度偏差确定,包括如下步骤:
[0074]
1.输入此时实际车辆制动强度z
est
,目标制动强度边界约束条件[z
trgt_min
,z
trgt_max
];
[0075]
2.判断此时实际车辆制动强度z
est
是否处于目标制动强度边界约束条件范围内,若此时实际车辆制动强度z
est
大于目标制动强度边界约束条件下限值z
trgt_min
,进入步骤3,否则说明此时实际车辆制动强度z
est
不处于目标制动强度边界约束条件范围内,得到制动
强度偏差δz=z
trgt_min-z
est
;
[0076]
3.判断此时实际车辆制动强度z
est
是否小于目标制动强度边界约束条件上限值z
trgt_max
,若是则说明此时实际车辆制动强度z
est
处于目标制动强度边界约束条件范围内,此时制动强度偏差δz=0,否则说明此时实际车辆制动强度z
est
不处于目标制动强度边界约束条件范围内,得到制动强度偏差为δz=z
trgt_max-z
est
;
[0077]
4.输出制动强度偏差δz;
[0078]
其中实际车辆制动强度z
est
=j
est
/g,j
est
为车辆制动减速度,由纵向加速度传感器得到。
[0079]
根据步骤二确定的制动强度偏差δz,步骤三通过增量式pid控制器计算所需实时修正的制动力δf
b
,包括:
[0080]
控制器第k个采样时刻的输出值为:
[0081][0082]
根据上式得到增量式pid控制算法为:
[0083]
δf
b
=f
b
(k)-f
b
(k-1)
[0084]
得到所需实时修正的制动力δf
b
详细表达式为:
[0085]
δf
b
=k
p
[δz(k)-δz(k-1)+k
i
δz(k)+k
d
(δz(k)-2δz(k-1)+δz(k-2))]
[0086]
=k
p
(1+k
i
+k
d
)δz(k)-k
p
(1+2k
d
)δz(k-1)+k
p
k
d
δz(k-2)
[0087]
=aδz(k)-bδz(k-1)+cδz(k-2)
[0088]
其中a、b、c均为控制参数,分别为:
[0089]
a=k
p
(1+k
i
+k
d
)
[0090]
b=-k
p
(1+2k
d
)
[0091]
c=k
p
k
d
[0092]
进一步地,步骤四输出此时制动能量回收系统所需实时修正的制动力δf
b
。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1