一种降低车辆急动方法及车辆制动装置与流程
[0001]
本发明涉及车辆制动领域,特别涉及一种降低车辆急动方法及车辆制动装置。
背景技术:
[0002]
车辆减速度随时间变化称之为急动度,急动度大小对驾驶舒适性有着很大的影响。当车辆以恒定的减速度制动时,车辆速度的下降时连续的,但是当速度达到0时变化结束,减速度会在短时间内突然从某一值降到0,由此产生高急动,导致舒适性的丧失。经验丰富的驾驶员虽然能够通过减小制动力来缓解急动,但是在某些情况下,他们也可能失去注意力,从而造成剧烈的颠簸,新手驾驶员更是无法避免因这种速度骤变所产生的急动度而造成的剧烈颠簸,给乘客带来的不适。
技术实现要素:
[0003]
鉴于背景技术中存在的技术问题,本发明所解决的技术问题旨在提供一种降低车辆急动方法及车辆制动装置。
[0004]
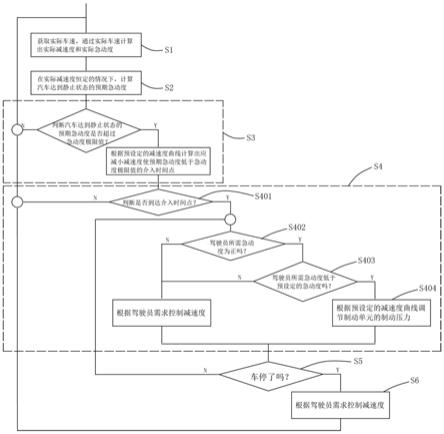
为解决上述技术问题,本发明采用如下的技术方案:一种降低车辆急动方法,其特征在于,包括如下步骤:s1、获取实际车速、实际减速度和实际急动度,通过监控驾驶员需求,确定驾驶员所需减速度203和所需急动度303;s2、在实际减速度恒定的情况下,计算汽车达到静止状态的预期急动度306;s3、判断汽车达到静止状态的预期急动度306是否超过急动度极限值304,若超出,则根据预设定的减速度曲线202计算出应减小减速度使预期急动度306低于急动度极限值304的介入时间点400;s4、当到达所述介入时间点400时,判断驾驶员所需急动度303是否在0和预设定的急动度302之间,若是,则根据预设定的减速度曲线202调节制动单元的制动压力,对车轮施加制动力矩。
[0005]
优选地,s3中,若汽车达到静止状态的预期急动度低于急动度极限值,则返回s1。
[0006]
优选地,s4中包括如下步骤:s401、判断是否达到介入时间点;s402、若到达介入时间点,则判断驾驶员所需急动度是否≥0,反之则返回s1;s403、若驾驶员所需急动度≥0,则判断驾驶员所需急动度是否低于预设定的急动度,反之则根据驾驶员需求控制减速度;s404、若驾驶员所需急动度在0与预设定的急动度之间,则根据预设定的减速度曲线调节制动单元的制动压力,反之则根据驾驶员需求控制减速度。
[0007]
优选地,还包括如下步骤:s5、判断车是否停止;s6、若车已经停止,则根据驾驶员需求控制减速度,反之则返回s402。
[0008]
优选地,根据恒定的实际减速度计算预期制动距离,创建能提供与预期制动距离相同的制动距离的预设定的减速度曲线。
[0009]
优选地,由车辆安全驻坡停车的最小减速度得出预设定的减速度曲线的最终值。
[0010]
优选地,通过获取坡角信息确定车辆安全停车所需的最小减速度。
[0011]
优选地,只要踩下制动踏板,制动单元的制动压力能够将减速度保持在使车辆安全停车所需的最小减速度上。
[0012]
优选地,施加在车轮上的制动力矩与驾驶员所需减速度203成比例:t=mar,其中t是施加在车轮上的制动力矩,m是整车质量,a为驾驶员所需减速度,r为车轮半径。
[0013]
一种车辆制动装置,其特征在于,包括获取单元,用于获取实际车速以及由制动踏板产生的驾驶员所需减速度;车轮单元,包括车轮;制动单元,包括制动踏板、智能制动助力器和制动卡钳,所述制动踏板接收驾驶员减速需求,根据驾驶员减速需要智能制动助力器通过制动回路与车轮上的制动卡钳连接,所述制动卡钳用于将制动压力转化为制动扭矩并作用在车轮上;主控单元,所述主控单元分别与获取单元、踏板单元、制动单元和车轮单元连接,所述主控单元用于执行权利要求1至8任一所述的降低车辆急动方法。
[0014]
优选地,所述获取单元包括第一传感器和第二传感器;所述第一传感器包括位置传感器、角度传感器、力传感器、扭矩传感器中的一种或几种,所述第一传感器设于制动踏板或智能制动助力器的输入杆上用于获取驾驶员所需减速度;所述第二传感器包括用于确定实际车速的速度传感器或用于确定实际减速度的加速度传感器。
[0015]
本发明的有益效果是:通过实时获取驾驶员所需减速度、驾驶员所需急动度、实际车速和实际减速度,根据预设定的减速度曲线计算出应减小减速度的介入时间点,当到达所述介入时间点时,根据预设定的减速度曲线调节制动单元的制动压力,对车轮施加制动力矩,其能够减缓因速度骤变所产生的急动度,减小急动度的大小或者减少急动度的出现次数,从而减少或减弱因急动度而造成的剧烈颠簸,使得车辆能具有更好的性能和驾驶舒适性,且降低了对驾驶员技术的依赖性。
附图说明
[0016]
图1为本发明车辆制动装置结构示意图;图2为本发明降低车辆急动方法流程图;图3为车辆动力学相关参数曲线图。
具体实施方式
[0017]
如图2和图3所示,一种降低车辆急动方法,包括如下步骤:s1、获取实际车速100,通过实际车速计算出实际减速度200和实际急动度300,实际减速度200是实际车速100的导数,实际急动度300是实际减速度200的导数,通过监控驾驶员需求,确定驾驶员所需减速度203和所需急动度303,驾驶员所需减速度即为驾驶员踩踏制
动踏板所产生的减速度,驾驶员所需急动度303是驾驶员所需减速度203的导数;s2、在实际减速度200恒定的情况下,计算汽车达到静止状态的预期急动度306;s3、判断汽车达到静止状态的预期急动度306是否超过急动度极限值304,若超出,则根据预设定的减速度曲线202计算出应减小减速度的介入时间点400,减小减速度是为了使预期急动度306低于急动度极限值304,若汽车达到静止状态的预期急动度306低于急动度极限值304,则返回s1;s4、当到达所述介入时间点400时,判断驾驶员所需急动度303是否在0和预设定的急动度302之间,若是,则根据预设定的减速度曲线202调节制动单元的制动压力,对车轮施加制动力矩。
[0018]
s4中包括如下步骤:s401、判断是否达到介入时间点;s402、若到达介入时间点,则判断驾驶员所需急动度是否≥0,反之则返回s1;s403、若驾驶员所需急动度≥0,则判断驾驶员所需急动度是否低于预设定的急动度,反之则根据驾驶员需求控制减速度;s404、若驾驶员所需急动度在0与预设定的急动度之间,则根据预设定的减速度曲线调节制动单元的制动压力,反之则根据驾驶员需求控制减速度;s5、判断车是否停止;s6、若车已经停止,则根据驾驶员需求控制减速度,反之则返回s402。
[0019]
通过上述方法得到的最终减速度曲线201使得最终急动度301能够低于急动度极限值304,并且在最终速度曲线101中消除了速度的断点。这样在驾驶员没有及时启动减速的情况下,可以自动开始减速,使急动度低于极限值以下。
[0020]
此外,如果发生意外导致驾驶员所需急动度发生变化,表示驾驶员希望增加减速度,则驾驶员可以介入控制降低减速度。
[0021]
通过上述方法还可以进一步计算出预期制动距离,根据恒定的实际减速度计算出预期制动距离,并且创建能提供与预期制动距离相同的制动距离的预设定的减速度曲线。
[0022]
通过上述方法还可以进一步确定汽车安全停车所需的最小减速度,由车辆安全驻坡停车的最小减速度得出预设定的减速度曲线的最终值。
[0023]
除此之外还可以通过设置坡角传感器用来获取坡角信息,从而确定车辆安全停车所需的最小减速度。
[0024]
通过上述方法可以实现只要踩下制动踏板即可控制所需减速度使其保持在最小减速度上以保证汽车安全停车。
[0025]
如图1所示,一种车辆制动装置,包括获取单元,用于获取实际车速以及由制动踏板产生的驾驶员所需减速度;车轮单元,包括车轮211、212、221、222;制动单元1,包括制动踏板12、智能制动助力器14和制动卡钳,所述制动踏板12接收驾驶员减速需求3,根据驾驶员减速需要智能制动助力器14通过制动回路21、22与车轮上的制动卡钳连接,所述制动卡钳用于将制动压力转化为制动扭矩并作用在车轮上;主控单元13,所述主控单元分别与获取单元、踏板单元、制动单元和车轮单元连接,所述主控单元用于执行权利要求1至8任一所述的降低车辆急动方法。
[0026]
所述获取单元包括第一传感器16和第二传感器17;所述第一传感器16包括位置传感器、角度传感器、力传感器、扭矩传感器中的一种或几种,所述第一传感器设于制动踏板或智能制动助力器的输入杆上用于获取驾驶员所需减速度;所述第二传感器17包括用于确定实际车速的速度传感器或用于确定实际减速度的加速度传感器。
[0027]
驾驶员的减速需求通过制动踏板来体现,驾驶员踩踏制动踏板表示有减速的需求,通过第一传感器检测信号并将信号输送给主控单元,主控单元收到驾驶员所需减速度的信息后计算驾驶员所需急动度,判断驾驶员所需急动度303是否在0和预设定的急动度302之间,如果是则命令智能制动助力器工作,智能制动助力器根据预设定的减速度曲线202通过电动机驱动主缸11内的活塞,使得活塞产生相对应的制动压力,通过制动回路将制动压力输送至制动卡钳,制动卡钳将制动压力转化为制动扭矩作用在车轮上。
[0028]
施加在车轮上的制动力矩与驾驶员所需减速度203成比例:t= mar,其中t是施加在车轮上的制动力矩,m是整车质量,a为驾驶员所需减速度,r为车轮半径。
[0029]
本发明采用解耦智能制动助力器,能够有效地缓解急动,还能够独立于驾驶员的减速需求来调整主缸中的压力,使得主缸压力和活塞位置的调整对制动踏板不会产生影响,这样不仅不会干扰驾驶员,而且能够提供更大的制动力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1