车辆中的制动辅助控制装置、制动辅助系统以及制动辅助控制方法与流程
车辆中的制动辅助控制装置、制动辅助系统以及制动辅助控制方法
1.相关申请的交叉引用
2.本技术主张基于通过参照将其全部公开并入本文的在2019年2月22日申请的申请号2019
‑
30246的日本专利申请的优先权。
技术领域
3.本公开涉及车辆中的制动辅助控制装置、制动辅助控制系统以及制动辅助控制方法,特别是涉及交叉路口中的制动辅助的控制技术。
背景技术:
4.提出如下技术:在交叉路口进行对向车道横穿时,根据到达本车的预先决定轨道与在对向车道移动的第一移动体的预测轨道的交叉位置的时间和到达本车的预先决定轨道与在对向车道横穿后存在的第二移动体的预测轨道的交叉位置的时间的时间差,来变更相对于第一移动体以及第二移动体的减速度(例如,日本特开2015
‑
170233号公报)。
5.然而,为了避免与作为一次对象物的第一移动体的碰撞,执行在交叉路口内使本车辆减速或者停止的制动辅助,若本车辆停留在交叉路口内,则例如在本车道是非优先车道而交叉车道是优先车道的情况下、针对本车道显示红灯的情况下,有时会导致与作为与一次对象物不同的二次对象物的第二移动体的碰撞。
6.因此,期望一种用于当正在接近交叉路口的本车辆在非优先车道或者非优先状态的车道行驶中的情况下,对一次对象物执行制动辅助,从而避免或者减少与在优先车道行驶的二次对象物碰撞的情况。
技术实现要素:
7.本公开能够作为以下的方式来实现。
8.第一方式提供具备检测器以及制动辅助装置的车辆中的制动辅助控制装置。第一方式所涉及的车辆中的制动辅助控制装置具备:获取部,从上述检测器获取本车辆的周围环境的信息;以及控制部,在使用所获取的上述周围环境的信息,判定为本车辆正在接近交叉路口且本车辆正在行驶的本车道相对于交叉车道是非优先车道的情况下,使上述制动辅助装置执行交叉路口进入抑制辅助。
9.根据第一方式所涉及的车辆中的制动辅助装置,当正在接近交叉路口的本车辆正在非优先车道或者非优先状态的车道行驶的情况下,对一次对象物执行制动辅助,从而能够避免或者减少与在优先车道行驶的二次对象物碰撞。
10.第二方式提供车辆中的制动辅助控制方法。第二方式所涉及的车辆中的制动辅助控制方法具备如:从检测器获取本车辆的周围环境的信息,在使用所获取的上述周围环境的信息,判定为本车辆正在接近交叉路口且本车辆正在行驶的本车道相对于交叉车道是非优先车道的情况下,使制动辅助装置执行交叉路口进入抑制辅助。
11.根据第二方式所涉及的车辆中的制动辅助控制方法,当正在接近交叉路口的本车辆正在非优先车道或者非优先状态的车道行驶的情况下,对一次对象物执行制动辅助,从而能够避免或者减少与在优先车道行驶的二次对象物碰撞。此外,本公开也能够作为车辆中的制动辅助控制程序或者记录该程序的计算机可读取的记录介质来实现。
附图说明
12.图1是表示搭载第一实施方式所涉及的制动辅助控制装置的车辆的说明图。
13.图2是表示第一实施方式所涉及的制动辅助控制装置的功能结构的框图。
14.图3是表示由第一实施方式所涉及的制动辅助控制装置执行的接近交叉路口时的制动辅助设定处理的处理流程的流程图。
15.图4是示意性地表示第一实施方式中的接近交叉路口时的执行制动辅助设定处理时的例示性的交叉路口环境的说明图。
16.图5是表示通过来自第一实施方式所涉及的制动辅助控制装置的指令执行的制动辅助处理的处理流程的流程图。
具体实施方式
17.以下基于几个实施方式对本公开所涉及的车辆中的制动辅助控制装置、制动辅助控制系统以及车辆中的制动辅助控制方法进行说明。
18.第一实施方式:
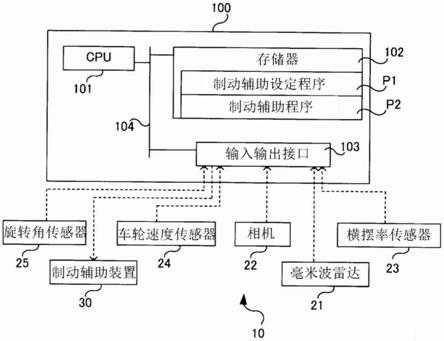
19.如图1所示,第一实施方式所涉及的制动辅助控制装置100搭载于具备检测器和制动辅助装置的车辆500来使用。制动辅助控制装置100至少具备控制部以及获取部即可,制动辅助控制系统10除了制动辅助控制装置100之外,还具备:作为检测器的毫米波雷达21、相机22、横摆率传感器23、车轮速度传感器24、旋转角传感器25以及制动辅助装置30。车辆500具备:车轮501、制动装置502、制动管路(line)503、转向盘504、挡风玻璃510以及前保险杠520。此外,车辆500也可以代替毫米波雷达21或者与毫米波雷达一起具备激光雷达(lidar)作为检测器,只要具备毫米波雷达21、激光雷达以及相机22中的至少任一个作为检测器即可。在本实施方式中,具备毫米波雷达21以及相机22作为检测器。毫米波雷达21的检测信号和相机22的检测信号也可以进行融合处理而使用。
20.在车辆500中,在各车轮501具备制动装置502。各制动装置502根据驾驶员的制动踏板操作通过经由制动管路503供给的制动液压实现各车轮501的制动。制动管路503包括使与制动踏板操作对应的制动液压派生的制动活塞以及制动液管路。在本实施方式中,在制动管路503具备制动辅助装置30、即致动器,能够与制动踏板操作独立地进行液压控制,由此实现制动辅助。此外,作为制动辅助装置30的致动器可以是用于防抱死制动系统(abs)的致动器,也可以是制动辅助专用的单体的致动器。作为制动管路503,也可以采用代替制动液管路而设为控制信号线使各制动装置502所具备的致动器动作的结构。转向盘504经由转向杆以及转向操纵机构与前侧的车轮501连接。除了致动器之外,制动辅助装置30还可以包括制动装置502以及制动管路503。
21.如图2所示,制动辅助控制装置100具备:作为控制部的中央处理装置(cpu)101、存储器102、作为获取部的输入输出接口103以及总线104。cpu101、存储器102以及输入输出接
口103经由总线104可双向通信地连接。存储器102包括非易失性地且读出专用地储存制动辅助设定程序p1以及制动辅助程序p2的存储器例如rom、以及cpu101可读写的存储器例如ram,其中,该制动辅助设定程序p1在车辆500接近交叉路口时设定抑制进入交叉路口的交叉路口制动辅助设定,该制动辅助程序p2用于执行由制动辅助装置30进行的制动辅助。cpu101作为控制部发挥功能,通过将储存于存储器102的制动辅助设定程序p1展开至可读写的存储器中并执行,从而在来到临近交叉路口时,本车道是非优先车道的情况下,设定抑制进入交叉路口的交叉路口制动辅助,在是优先车道的情况下或者来到交叉路口时以外的情况下,设定基准制动辅助,并按照所设定的制动辅助设定使制动辅助装置30执行制动辅助,同样地作为制动辅助控制部发挥功能,通过执行制动辅助程序p2,从而按照所设定的制动辅助设定通过制动辅助装置30来控制制动辅助。cpu101可以是单体的cpu,也可以是执行各程序的多个cpu,或者也可以是能够同时执行多个程序的多核型cpu。
22.毫米波雷达21、相机22、横摆率传感器23、车轮速度传感器24、旋转角传感器25以及制动辅助装置30分别经由控制信号线与输入输出接口103连接。从毫米波雷达21、相机22、横摆率传感器23、车轮速度传感器24以及旋转角传感器25输入检测信息,对制动辅助装置30输出指示基于所设定的制动辅助设定的制动装置502的驱动的控制信号。
23.毫米波雷达21是通过射出毫米波并接收被对象物反射的反射波来检测物标相对于车辆500的距离、相对速度以及角度的传感器。在本实施方式中,毫米波雷达21配置在前保险杠520的中央以及前保险杠520的两侧面。从毫米波雷达21输出的未处理的检测信号作为在毫米波雷达21中由ecu进行信号处理并由表示物标的一个或多个代表位置的检测点或者检测点列构成的检测信号输入到制动辅助控制装置100。或者,表示未处理的接收波的信号也可以作为检测信号从毫米波雷达21输入到制动辅助控制装置100。在将未处理的接收波作为检测信号来使用的情况下,在制动辅助控制装置100中执行用于确定物标的距离、相对速度以及角度的信号处理。
24.相机22是具备ccd、cmos等拍摄元件或者拍摄元件阵列的拍摄装置,是通过接受可见光而将对象物的外形信息作为检测结果亦即图像数据输出的传感器。对于在相机22中生成的图像数据,通过由相机22具备的ecu例如实施使用语义分割的对象物的分类处理,并将表示相同的对象物的像素结合,从而分别提取表示各对象物的图像区域。在相机22中未执行分类处理的情况下,由相机22拍摄的未处理的图像数据作为检测信号被输入到制动辅助控制装置100。在这种情况下,在制动辅助控制装置100中执行物标的分割处理等。在本实施方式中,相机22配置在挡风玻璃510的上部中央。从相机22输出的像素数据也可以是单色的像素数据。在这种情况下,在分割时使用亮度值。相机22可以是单眼相机,也可以是复眼立体相机。
25.横摆率传感器23是检测车辆500的旋转角速度的传感器。横摆率传感器23例如配置在车辆的中央部。从横摆率传感器23输出的检测信号是与旋转方向和角速度成比例的电压值。
26.车轮速度传感器24是检测车轮501的旋转速度的传感器,在各车轮501中具备。从车轮速度传感器24输出的检测信号是与车轮速度成比例的电压值或者表示与车轮速度对应的间隔的脉冲波。通过使用来自车轮速度传感器24的检测信号,能够得到车辆速度、车辆的行驶距离等信息。
27.旋转角传感器25是检测通过转向盘504的转向操纵而在转向杆产生的扭转量、即转向操纵转矩的转矩传感器。在本实施方式中,在连接转向盘504和转向操纵机构的转向杆具备旋转角传感器25。从旋转角传感器25输出的检测信号是与扭转量成比例的电压值。
28.制动辅助装置30是制动辅助部,包括用于与驾驶员的制动踏板操作无关地实现制动装置502的制动的致动器。在本实施方式中,在制动管路503具备制动辅助装置30,按照来自制动辅助控制装置100的控制信号使制动管路503中的液压增减。制动辅助装置30例如由具备电动马达和由电动马达驱动的液压活塞的模块构成。或者,也可以使用作为防侧滑装置、防抱死制动系统已经导入的制动控制致动器。
29.参照图3和图4,对由第一实施方式所涉及的制动辅助控制装置100执行的、接近交叉路口时的制动辅助设定处理进行说明。通过cpu101执行制动辅助设定程序p1,例如从车辆的控制系统的启动时到停止时,或者从启动开关被接通到启动开关被断开,以msec级的规定的时间间隔反复执行图3所示的处理例程。
30.cpu101使用从毫米波雷达21及相机22的至少任意一方输入的检测信号来获取本车辆m1周围的周围环境信息(步骤s100)。周围环境信息例如包括与交叉路口形状、信号灯sg的亮灯状态、道路标识ss1、ss2、ss3、暂时停止、慢行、表示交叉道路优先的优先显示这样的道路标志相关的信息以及与成为制动辅助的对象的对象物标相关的信息。
31.cpu101使用获取到的环境信息来判定本车辆m1是否正在接近交叉路口is,即是否正在向交叉路口is行进(步骤s102)。本车辆m1是否正在接近交叉路口is例如能够使用方向指示器的操作、交叉路口形状、信号灯sg的有无、作为道路标识的停止线ss1、作为道路标识的人行横道显示ss2、作为道路标识的交叉路口显示ss3、交叉路口显示、暂时停止、慢行或者优先显示这样的道路标志中的至少任意一个来判定。cpu101使用从毫米波雷达21及相机22的至少任意一方输入的检测信号来识别交叉路口形状,判定本车辆是否处于进入交叉路口的状态。交叉路口形状例如包括中央分隔带的端部、形成车道和人行道的台阶部的路缘石cs、沿交叉路口设置的护栏gr、防护管。cpu101例如能够基于从毫米波雷达21输入的检测信号所示的表示物标的点列的分布特性来识别上述的交叉路口形状。cpu101还使用从相机22输入的图像数据来识别交叉路口形状、信号灯sg的有无、道路标识ss1、ss2、ss3、道路标志,并判定本车辆是否正在向交叉路口行进。cpu101通过对从相机22输入的图像数据执行边缘提取处理,并执行与预先准备的对象物的形状图案匹配、与预先准备的对象物的色彩的匹配,从而判别对象物的视觉的形状。此外,交叉路口is并不限于四叉路口,也可以是三叉路口或者五叉路口以上。
32.cpu101若判定为本车辆m1正在接近交叉路口is(步骤s102:是),则判定本车道相对于与本车辆m1行驶的本车道交叉的交叉车道的优先或者非优先(步骤s104)。例如使用优先标志、暂时停止标志或者慢行标志这样的道路标志、优先显示、暂时停止显示或者慢行显示这样的道路显示、或者信号灯sg的信号亮灯状态来判定优先或者非优先的判定。并且,为了提高检测出的道路标志或者道路标识以本车辆m1为对象的精度,也可以在检测出的道路标志或者道路标识与本车辆m1的距离为预先决定的距离以下的情况下,判定是否是非优先车道。在本车辆m1使用道路标志或者道路标识的情况下,本车道是非优先车道而交叉车道是优先车道的关系是永久性的,在针对本车道显示红灯的情况下,可以说本车道暂时处于非优先状态,交叉车道处于优先状态。
33.在cpu101判定为本车道不处于非优先车道或者非优先状态,即本车辆m1正在优先道路或者处于优先状态的道路的车道行驶的情况下(步骤s106:否),将制动辅助设定设定为基准制动辅助(步骤s108),并结束本处理例程。基准制动辅助设定是在制动辅助的一次对象物、图4中交叉车辆m2的行进轨道与本车辆m1的预定轨道的碰撞交点使本车辆m1停止或者将本车辆m1的速度设为时速0km,避免与一次对象物的碰撞的制动辅助。由于作为二次对象物的交叉车辆m3正在非优先车道行驶,因此即使伴随着以交叉车辆m2为对象物标的制动辅助的执行而避免一次碰撞,本车辆m1在交叉路口is内停止,也不会产生本车辆m1与作为二次对象物的交叉车辆m3的二次碰撞。在基准制动辅助设定中,规定用于实现上述条件的制动开始定时、即判定ttcr[s](碰撞富余时间),还包括制动辅助执行后的预先决定的时间内的制动状态的维持、即制动保持。
[0034]
在cpu101判定为本车道是非优先车道或者非优先状态、即本车辆m1正在非优先道路或者不处于优先状态的道路的车道行驶的情况下(步骤s106:是),将制动辅助设定设定为交叉路口制动辅助设定(步骤s110),并结束本处理例程。交叉路口制动辅助设定是用于抑制进入交叉路口is的制动辅助设定,是交叉路口进入抑制辅助。具体而言,进入交叉路口is的报知、促使基于弱制动力的由驾驶员进行的制动、弱制动力即弱的减速的提前、执行基于弱制动力的制动辅助及制动辅助的提前、以及报知是促使驾驶员在进入交叉路口is之前进行制动操作以在交叉路口is的跟前使车辆停止的制动辅助。例如以停止线ss1、人行横道ss2为本车辆m1的停止位置来执行这些制动辅助。制动操作的辅助是驾驶员执行的制动操作的辅助,例如是用于通过进行预先提高制动管路503的液压的增压来提高对驾驶员的制动操作的响应性,从而防止或者抑制进入交叉路口is的制动辅助。若本车辆m1正在非优先车道或者非优先状态的车道行驶时进入交叉路口is,为了避免与作为一次对象物的交叉车辆m2的一次碰撞而执行基准制动辅助,则有可能产生正在优先车道行驶的二次对象物亦即交叉车辆m3与停止的本车辆m1的二次碰撞。根据交叉路口制动辅助设定,本车辆m1正在非优先车道或者非优先状态的车道行驶时,抑制或者防止进入交叉路口is,因此能够避免或者抑制二次碰撞。
[0035]
制动辅助控制装置100通过cpu101执行制动辅助程序p2而执行针对制动辅助的对象物标的制动辅助处理。图5所示的流程图与图3所示的流程图相同,按照预先决定的时间间隔反复执行。
[0036]
cpu101获取所设定的制动辅助设定(步骤s200)。cpu101获取由毫米波雷达21及相机22检测到的检测信息(步骤s202)。cpu101根据所设定的制动辅助设定来执行制动辅助(步骤s204),并结束本处理例程。在设定了基准制动辅助设定的情况下,cpu101使用本车辆m1的速度和到碰撞交点的距离来计算到碰撞交点的碰撞富余时间ttc,使用计算出的ttc和判定ttcr,经由制动辅助装置30执行在碰撞交点使本车辆m1停止的制动辅助。在设定了交叉路口制动辅助设定的情况下,cpu101执行正在接近交叉路口is的报知、促使经由制动辅助装置30的基于弱制动力的由驾驶员进行的制动、经由制动辅助装置30的以停止线ss1、人行横道ss2为碰撞交点的弱制动力的提前。报知可以通过向驾驶员通知接近交叉路口的声音以及显示中的至少任意一方来执行。cpu101也可以执行预先提高制动管路503的液压的增压作为制动操作的辅助。
[0037]
根据以上说明的第一实施方式所涉及的制动辅助控制装置100,当本车辆m1正在
接近交叉路口is,且正在非优先车道行驶的情况下,执行基于抑制或者防止进入交叉路口is的交叉路口制动辅助设定的制动辅助,因此当正在接近交叉路口is的本车辆m1正在非优先车道或者非优先状态的车道行驶的情况下,对一次对象物执行制动辅助,从而能够避免或者减少与在优先车道行驶的二次对象物碰撞。由于不容易检测向交叉路口is的正确的进入位置,判定精度也低,因此即使使本车辆m1在检测出的交叉路口is的进入位置停止,有时也无法避免与交叉车辆m2、m3的碰撞。另外,执行针对交叉路口is内的一次对象物的制动辅助并避免与不容易预测的二次对象物的碰撞也是不容易的。与此相对,当本车辆m1正在接近交叉路口is时,第一实施方式所涉及的制动辅助控制装置100执行使驾驶员识别进入交叉路口is的制动辅助,还执行辅助驾驶员的制动操作的制动辅助,因此抑制或者防止本车辆m1进入交叉路口is本身。其结果是,不仅避免与一次对象物的一次碰撞,还能够避免或者抑制伴随与一次对象物的一次碰撞避免的与二次对象物的二次碰撞。
[0038]
其它实施方式:
[0039]
(1)在上述实施方式中,通过不同的处理流程执行制动辅助设定处理和制动辅助处理,但也可以与图3所示的制动辅助设定的设定(步骤108、步骤s110)一起执行制动辅助。即,制动辅助控制装置100也可以通过相同的处理例程执行制动辅助设定和基于所设定的制动辅助设定的制动辅助。
[0040]
(2)在上述实施方式中,制动辅助控制装置100搭载在车辆500上,但也可以在车辆500的外部例如远程服务器中具备。在这种情况下,能够在遥远的地方执行针对多个车辆500的制动辅助。
[0041]
(3)在上述实施方式中,使用来自作为检测器的毫米波雷达21、相机22或者激光雷达以及立体相机的检测信号或者图像数据来判定进入交叉路口。与此相对,也可以使用来自光信标的信息、全球导航卫星系统(gnss)以及导航系统中的地图信息来判定进入交叉路口。
[0042]
(4)在上述各实施方式中,通过cpu101执行制动辅助设定程序p1,以软件的方式实现对接近交叉路口时的制动辅助设定进行设定的控制部,但也可以通过预先编程的集成电路或者分立电路以硬件的方式来实现。即,上述各实施方式中的控制部及其方法也可以通过专用计算机来实现,该专用计算机通过构成被编程为执行由计算机程序具体化的一个或多个功能的处理器以及存储器来提供。或者,本公开所记载的控制部及其方法也可以通过由一个以上的专用硬件逻辑电路构成处理器而被提供的专用计算机来实现。或者,本公开所记载的控制部及其方法也可以通过一个以上的专用计算机来实现,该一个以上的专用计算机通过被编程为执行一个或多个功能的处理器及存储器和由一个以上的硬件逻辑电路构成的处理器的组合而构成。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读的非过渡有形记录介质。
[0043]
以上,基于实施方式、变形例对本公开进行了说明,但上述的发明的实施方式是用于容易理解本公开的内容,并不限定本公开的内容。本公开可以不脱离其主旨以及权利要求书而变更、改进,并且在本公开中包括其等价物。例如,与发明内容记载的各方式中的技术特征对应的实施方式、变形例中的技术特征为了解决上述的课题的一部分或者全部,或者为了实现上述的效果的一部分或者全部,能够适当地进行替换、组合。另外,若该技术特征不是作为本说明书中必需的技术特征进行说明,则能够适当地删除。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1