用于获知车辆组合的两个子车辆之间的扭折角的检测系统和方法以及车辆组合与流程
1.本发明涉及用于获知车辆组合的以能运动的方式彼此连接的两个子车辆之间的扭折角的检测系统和方法。本发明还涉及车辆组合,其由至少两个子车辆连同根据本发明的检测系统构成,该检测系统尤其是用于执行根据本发明的方法。
背景技术:
2.在由作为第一子车辆的牵引车和作为第二子车辆的诸如半挂车或全挂车的挂车所构成的车辆组合中,已知各个子车辆之间的扭折角是特别重要的。例如,基于这个扭折角可以发生车辆组合在仓库的自动化的灵活操纵。此外,借助扭折角以及对挂车定位或定向的估计,使得挂车可以自动钩连并对接到牵引车上。此外,在驾驶员辅助的范围内可以依赖于所获知的扭折角来创建车辆组合的虚拟的俯视图,该俯视图尤其可以用于车辆组合的全方位视图中。
3.扭折角的获知在此例如通过测程法(odometrie)来实现,也就是说依赖于车辆组合的所检测到的行驶动态,例如转向角、行程等来估计出第一子车辆相对于第二子车辆的定位。然而,在迄今的系统中,这样的估计只有在向前行驶时才能以高准确性进行。而在倒退行驶时,例如在调车时,在不需要动用另外的传感器的情况下,通过测程法却无法获知足够精确的扭折角。
4.此外还公知有用于进行角度确定的措施,这些措施动用相机系统作为探测装置,其中,相机系统的检测区域对准后面的子车辆或挂车,并且在该检测区域中在挂车上装配有测量标记。该测量标记可以被相机系统检测到,并且可以从所拍摄到的测量标记图像中推断出角度。为此,在de 10 2014 211 106 a1中设置有透镜场作为测量标记,从其测量标记图像中可以根据角度提取出特定的灰色调。在de 10 2016 121 514 a1中描述了将目标对象物作为图案布置在挂车的拉杆上,其中,该目标对象物由相机系统拍摄到。然后依赖于所拍摄到的目标对象物来获知扭折角。us 2018/0040129 a1还描述了在挂车的前部面上的条形码。
5.在另外已知的方法中,挂车可以经由探测装置来检测并经由特殊算法进行跟踪,其中,例如发生轮廓识别或棱边识别,借助其例如可以随时间跟踪挂车的前侧。依赖于该轮廓识别或棱边识别,可以推断出挂车相对于牵引车如何运动,从中可以直接估计出扭折角。例如在ep 3 180 769 a1中描述了这种检测系统。在de 10 2008 029 612 a1中还描述了一种检测系统,其中,获知了挂车的车轮与相机系统之间的角度并且经由车辆尺寸推断出扭折角。在de 10 2011 104 256 a1中也对图像特征进行评估,并且在全挂车的情况下由此获知扭折角。
6.这些检测系统不利的是,为了可靠地识别挂车的棱边或轮廓或图形标记,必须存在非常好的照明条件,并且此外,挂车的前侧需要纹理清晰和高对比度,以便能够将车辆组合周围的环境与挂车的前侧分出界限,并且因此能够实现可靠的轮廓或棱边识别。
技术实现要素:
7.因此,本发明的任务是,说明一种检测系统和方法,利用该检测系统和方法可以几乎与环境条件无关地精确且容易地获知扭折角。此外,该任务还说明一种具有这种检测系统的车辆组合。
8.该任务通过根据权利要求1的检测系统以及根据另外的独立权利要求的方法和车辆组合来解决。
9.根据本发明,因此设置有用于获知车辆组合的一个子车辆与铰接式地与该子车辆连接的另外的子车辆之间的扭折角的检测系统,该检测系统具有投影装置,该投影装置被构造成将预定的图案成像到该另外的子车辆的部分区域上以用于在该另外的子车辆上建立图案图像,其中,该图案图像可以被处理单元从探测信号中提取出来,并且处理单元可以根据所提取的图案图像获知扭折角。图案图像在此被检测系统的探测装置拍摄到,其中,探测装置布置在车辆组合的其中一个子车辆上,并且探测装置的检测区域至少部分对准与该其中一个子车辆铰接式连接的另外的子车辆的部分区域上,从而使得可以由探测装置产生并输出探测信号,该探测信号表征了另外的子车辆上的连同图案图像在内的部分区域。检测系统的处理单元还被构造成接收探测信号并根据探测信号从所提取出的图案图像来获知两个子车辆之间的扭折角。所提取出的图案图像在此被理解为,处理单元分析探测信号并从所检测到的环境中过滤出图案图像。这可以通过图案识别来进行,该图案识别例如也存在预定的图案。
10.在此,被理解为子车辆的是牵引车或挂车,例如鞍式半挂车、全挂车等,其中,可以利用检测系统根据探测装置和投影装置的对准方式来获知牵引车与挂车之间的或两个挂车之间的扭折角。检测系统的部件在此可以要么仅位于其中一个子车辆上,例如位于牵引车或其中一个挂车上,要么分布在多个子车辆上。然后将图案投影到相应的另外的子车辆上并通过探测装置拍摄。
11.由此已经实现的优势是,使得检测系统可以灵活地或可变地与各自的车辆组合相匹配。图案在此能像检测系统的布置那样自由选择。为了产生图案图像,因此仅需要在各自的子车辆上的一个面(部分区域),例如在挂车的前侧上,探测装置也对准该面。这可以在装配检测系统的部件时得到确认,其中,也能容易进行后续的调校。在此,不需要加工部分区域或不需要将标记施加在各自的子车辆上,这是因为投影可以优选地与部分区域的表面无关地发生。如有必要,图案的位置或图案的形状也可以以简单的方式与现有的表面相匹配。环境照明对图案图像的成像和探测也仅有较少的影响,其中,也可以为投影选择仅受环境照明较少影响的定位。
12.优选设置的是,处理单元被构造成从所提取出的图案图像中获知几何信息并且依赖于这些几何信息推断出一个子车辆与另外的子车辆之间的扭折角。因此有利地假设,根据简单的几何规则,在扭折角改变时图案图像也改变,这是因为其中使图案成像在部分区域上的投影平面相对于投影装置发生移动或枢转。图案图像中的这些变化可以被检测到,并且可以从中以简单的方式推断出扭折角。
13.此外,优选设置的是,处理单元被构造成获知图案图像的水平延伸的线和/或竖直延伸的线之间的线夹角和/或线间距,其中,几何信息表征了图案图像的几何形状,并且图案图像的几何形状依赖于扭折角地变化。
14.因此,线夹角或线间距可以作为几何信息从图案图像获知,它们表征了图案图像本身并且从中得出扭折角。因此,图案图像可以非常简单地设计,例如被设计为由水平和竖直延伸的线构成的网格,这些线在某个起始状态下例如在直线行驶时以直角相交。
15.起始状态在此可以是已知扭折角的行驶状态,从而可以将已知的扭折角与特定的图案图像或线夹角或线间距相配属。由于竖直或水平延伸的线的线间距或线夹角能非常好地获知,并且这些线间距或线夹角依赖于扭折角地也在已知几何相关性的情况下发生变化,因此这些几何信息是非常精确且能易于获知的指标,从中可以简单且可靠地推导出未知的扭折角。然而原则上,振荡线或对角线或其他几何形状的图案也是可能的,从中可以推导出几何信息,这些几何信息表征了各自的几何形状并且这些几何信息也依赖于扭折角以可理解的方式改变。
16.此外,优选设置的是,处理单元被构造成从所获知的线夹角和/或所获知的线间距来获知从具有已知扭折角的起始状态例如在直线行驶的情况下出发的线夹角变化和/或线间距变化,并从中经由扭折角的变化推断出当前存在的扭折角。
17.因此,可以以简单且可靠的方式检测图案图像的几何变化。然后可以有利地从该几何变化推断出扭折角的变化,这是因为这两个变化总是彼此关联。其基础是在了解车辆尺寸、尤其是部分区域或投影平面相对于子车辆之间的转动点的位置方面的简单的几何观察。
18.根据补充的(冗余的)或替选的实施方案设置的是,处理单元被构造成将所提取出的图案图像与存储的参考图案进行比较,其中,给每个所存储的针对各自车辆组合的或针对各自的子车辆的参考图案配属有扭折角,并且在与参考图案相一致的情况下推断出各自所配属的扭折角。因此,扭折角也可以通过对图案的简单的实际/目标比较来获知,其中,为此必须事先获知针对各自的车辆组合或各自的子车辆的参考图案。
19.优选设置的是,检测系统布置在作为车辆组合的子车辆的牵引车和/或至少一个挂车上,以用于获知车辆组合的牵引车与铰接式地与该牵引车连接的挂车之间的或两个铰接式地彼此连接的挂车之间的扭折角。为此,优选可以设置的是,投影装置布置在分别作为其中一个子车辆的牵引车或至少一辆挂车上,并且部分区域和投影平面位于作为另外的子车辆的挂车或牵引车上。因此,图案图像要么可以成像到牵引车上,要么可以成像到其中一个挂车上,并且投影装置可以布置在相应的另外的子车辆上,从而在扭折角发生变化时,得到投影平面相对于投影装置的相对位置的变化。因此,检测系统能非常灵活和可变地使用,并且能容易地加装。
20.此外,优选设置的是,投影装置可以在可见或不可见光谱中将预定的图案投影到部分区域上。因此,根据应用,可以通过有针对性地选出辐射来将图案图像成像到子车辆上,其中,然后探测装置相应地被构造成探测该辐射。例如,可以选择红外辐射作为不可见光谱中的辐射,其具有的优点是,投影和探测也可以几乎与环境条件无关地进行。此外,即使在表面很脏的情况下且几乎与部分区域的表面性质无关地也能够进行投影和探测。
21.此外,优选设置的是,另外的子车辆上的未通过投影装置成像预定的图案的部分区域没有用于获知扭折角的器件。因此,没有设置施加、例如印刷或以其他方式紧固在该部分区域上的被探测装置拍摄到的且可以由此以处理装置获知扭折角的图案、条形码等作为这种器件。因此,有利地,利用根据本发明的检测系统获知扭折角仅基于对通过投影装置投
影的图案的分析和处理。
22.根据本发明的用于获知车辆组合的子车辆与车辆组合的与该子车辆铰接式连接的另外的子车辆之间的扭折角的方法,该方法至少设置有以下步骤:
23.‑
将预定的图案投影到另外的子车辆的部分区域上,以用于在另外的子车辆上创建图案图像;
24.‑
检测图案图像并且产生和输出探测信号,该探测信号表征了另外的子车辆上的部分区域;
25.‑
接收并处理探测信号,使得从探测信号中提取出图案图像并且根据所提取出的图案图像来获知扭折角。
26.根据本发明的车辆组合以所描述的方式具有根据本发明的检测系统,该检测系统尤其被构造成执行根据本发明的方法。
附图说明
27.下面参照附图更详细地解释本发明。其中:
28.图1示出由彼此能运动地连接的两个子车辆构成的车辆组合的俯视图;
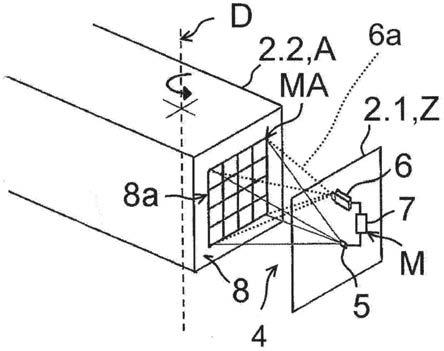
29.图2示出根据图1的车辆组合的截段的透视图;
30.图3a、3b示出处于不同行驶状况下的示例性的图案图像;并且
31.图4示出根据本发明的方法的流程图表。
具体实施方式
32.根据图1示出了由作为第一子车辆2.1的牵引车z和作为第二子车辆2.2的挂车a(鞍式半挂车)构成的多件式的车辆组合1,其中,车辆组合1被示例性地构造为鞍式牵引机。然而,原则上,所描述的发明也可以设置在具有全挂车或中轴挂车作为被牵引的挂车a的车辆组合1上(未示出)。车辆组合1也可以具有两个以上铰接式彼此连接的子车辆2.i,其中,i=1、2、...n(巨型载重车辆、长载重车辆)。
33.根据图1,挂车a经由鞍座主销3铰接式地与牵引车z连接,由此使得挂车a例如在转弯行驶时围绕延伸通过鞍座主销3的转动轴线d相对于牵引车z转动。由此在牵引车z与挂车a之间出现了特定的扭折角k。为了获知该扭折角k,车辆组合1具有检测系统4,其中,根据该实施例的检测系统4具有投影装置5、探测装置6和处理单元7。
34.投影单元5在此被构造成将预定的图案m投影或成像到挂车a的前部面8的部分区域8a上,并且因此在挂车a上的特定的投影平面8b中产生了图案图像ma。投影平面8b在此通过挂车a的前部面8的空间上的位置来确定。在本实施方案中,投影装置5与牵引车z牢固连接,并且朝着挂车a的方向对准,该挂车的前部面8相应地指向牵引车z。
35.根据该实施例,探测装置6同样布置在牵引车z上,其中,探测装置6的检测区域6a对准挂车a的前部面8并且在此至少对准部分区域8a。因此,探测装置6可以至少检测到在投影平面8b中成像到挂车a的前部面8上的图案图像ma。
36.为此,探测装置6例如构造为拍摄图像的传感器,尤其是相机,利用该传感器可以检测挂车a的前部面8上的图案图像ma。为此,探测装置6依赖于所检测到的环境u、尤其是所检测到的图案图像ma来产生探测信号s,并且将该探测信号输出给处理单元7。处理单元7被
构造成基于传感器信号s处理所检测到的环境u。由于探测装置6的检测区域6a也对准部分区域8a,因此处理单元7可以从传感器信号s中提取出图案图像ma并对其进行分析。
37.投影装置5可以被构造成将在可见光谱中或者不可见光谱中例如红外范围中的预定的图案m成像到投影平面8b中的部分区域8a上。为此,投影装置5例如实施为针对可见光谱的激光器或者被构造为针对不可见光谱、尤其是在红外范围内的发光二极管。探测装置6以相应的方式与投影装置5的所使用的辐射类型相协调,从而可以检测到图案图像ma。在可见光谱中的成像具有的优点是,使得挂车a的前部面8在视觉上几乎可以任意地设计,这是因为探测装置6在处理和分析图案图像ma时不会“感知”到这一点。
38.在车辆组合1直线行驶fg时,所提取的图案图像ma与以特定的扭折角k的情况下的转弯行驶fk时所提取的图案图像ma不同,这是因为挂车a的前部面8上的投影平面8b在挂车a相对于牵引车z扭转时相对于投影装置5发生移动或枢转。因此,投影或提取的图案图像ma也会发生变化,这与牵引车z与挂车a之间现有的扭折角k有关。
39.因此,例如,图案图像ma中的在直线行驶fg时彼此平行延伸(参见图3a)的水平延伸的线lh在转弯行驶fk时相对彼此以特定的线夹角lw倾斜(参见图3b),从而它们不再彼此平行延伸。此外,图案图像ma的在直线行驶fg时彼此平行地竖直延伸的线lv在转弯行驶fk时彼此接近,从而使得竖直延伸的线lv之间的线间距la依赖于扭折角k而变化。在竖直延伸的线(未示出)的情况下,这些效果相应地组合。
40.因此,可以从图案图像ma的各自的线lh、lv之间的线间距la和/或线夹角lw得出关于当前在挂车a与牵引车z之间存在哪个扭折角k的结论。例如,推导扭折角k可以不依赖于任何时间点(绝对性)地或通过对线间距la和/或线夹角lw进行时间上的或增量式的观察来通过如下方式进行,即,获知线间距变化dla和/或线夹角变化dlw。
41.在进行绝对性获知时,优选事先执行校准,或者应确保图案图像ma的图像平面平行于挂车a的前部面8,并且成像出具有预定的线间距la和线夹角lw的预定的图案m。然后可以在任意时间点经由几何观察从所变化的线间距la或线夹角lw获知扭折角k。
42.在增量式方法中,线间距la和/或线夹角lw可以在扭折角k是已知的例如当事先确认直线行驶fg(k=0
°
)时的第一时间点t1时获知,并且接着在具有未知的扭折角k的第二时间点t2时获知。从所得的线间距变化dla和/或线夹角变化dlw,可以推断出关于未知的扭折角k或扭折角变化dk。这直接从以相应方式保存在处理单元7中的几何模型得出。
43.推导扭折角变化dk能以简单的方式进行,这是因为投影平面8b在前部面8上相对于探测装置6和投影装置5的位置在第一时间点t1时是准确已知的。这从在该第一时间点t1时了解到扭折角k和车辆尺寸得出。然后可以将在第一时间点t1所拍摄的具有相应线间距la和/或线夹角lw的图案图像ma与该行驶状态相配属。当在转弯行驶fk期间扭折角k发生变化时,则利用已知的车辆尺寸和之后拍摄的图案图像ma或之后存在的线间距la和/或线夹角lw可以通过在几何模型中所考虑的简单的几何观察来推断出未知的扭折角k或扭折角变化dk。
44.在此,第一时间点t1不必强制性地在直线行驶fg时存在。相反,任何使得扭折角k是已知的或可以在图案图像ma与扭折角k之间进行配属的时间点都是可能的。于是,在增量式确定时,总是从与该起始状态相配属的图案图像ma或所属的线间距la和/或线夹角lw出发来进行对扭折角变化dk或未知的扭折角k的获知。
45.替选地或补充地,还能够针对每个扭折角k将参考图案mr存储在处理单元7中并且将在未知扭折角k的情况下的图案图像ma与这些参考图案mr进行比较。在与参考图案mr相一致时,可以输出相应配属的扭折角k。因此,参考图案mr对于各自的车辆组合1来说是事先经精确获知或校准的,以便可以在运行中动用它们。
46.在使用全挂车或中轴挂车时,相应地匹配经由几何模型或参考图案mr对图案图像ma的分析,其中,为此,各自的挂车a上投影平面8b的位置由针对各自的扭折角k的车辆尺寸已知或者可以估计出。
47.根据未要求保护的变型方案,也可以取消投影装置5。因此,预定的图案m并不投影到挂车a的前部面8上的部分区域8a中。而是,以任意的方式将预定图案m直接在部分区域8a中施加到挂车a的前部面8上。于是,所施加的图案m在一定程度上与图案图像ma相同并且在探测装置6的检测区域6a相应对准的情况下经由探测信号s输出给处理单元7。在该情况下,也根据预定的图案m而定地,图案m的或图案图像ma的线lh、lv之间的线间距la或线夹角lw发生变化,从而从图案图像ma的变化推断出扭折角k。这在该实施例中也通过保存在处理单元7上的几何模型来实现或通过与参考图案mr的比较来实现。
48.然而,具有投影装置5的实施方式的优点在于,提供了简单的可加装性,这是因为挂车a本身可以保持不变并且仅需要在牵引车z上加装检测系统4的相应部件5、6、7。由此,使得即使在更换挂车a时,也仍然可以实现扭折角确定,而不必对各自的挂车a进行相应地加装或改装。其中投影有图案图像ma的部分区域8a的确认可以针对每个挂车a以如下简单且有针对性的方式与所调整的检测区域6a相匹配并且反之亦然,即,相应地装配投影装置5或探测装置6。因此,无论怎样选择挂车a都能够确保图案图像ma实际上也可以被投影和检测。
49.此外,可以简单地通过更换预定的图案m来改变图案图像ma,其中,当车辆尺寸不变时,则可以取消将几何模型与该新预定的图案m相匹配。然而,图案图像ma的几何变化与扭折角k的相关性保持不变。
50.此外,在投影预定的图案m时,挂车a的前部面8的表面性质几乎可以任意地实施。即使在污染的情况下,也仍然可以进行带有后续探测的投影,由此可以实现几乎与环境条件无关的扭折角k获知。
51.根据图2,投影装置5和探测装置6以及处理单元7均布置在牵引车z上。然而,原则上也能够将这些部件5、6、7中的单个或所有部件布置在挂车a上并随后对准牵引车z。
52.此外,这种检测系统4在由两个以上的子车辆2.i构成的车辆组合1的情况下,其中,i=1、2、...n;n>2,(长载重车辆、重型载重车)也可以布置在两个挂车a之间,以便确定两个挂车a之间的扭折角k。所描述的获知扭折角k的系统能以相同的方式转移到这种状况下,其中,然后优选地将投影装置5和探测装置6布置在同一挂车a或子车辆2.m上,其中m>1,并且对准分别邻接的子车辆2.n,n>2并且m=/n,以便将图案图像ma投影到其上,并且随后可以对其进行检测和分析。
53.根据本发明,用于获知扭折角k的方法例如可以如下执行:
54.在开始的步骤st0中进行初始化,例如当车辆组合1启动时或在确认挂好了挂车a时。因此,由投影装置5在可见或不可见光谱os,on下将预定的图案m在部分区域8a中投影到挂车a或相应的子车辆2.i的前部面8上。
55.在第一步骤st1中,例如在事先确认直线行驶fg(k=0
°
)的情况下,在扭折角k是已知的第一时间点t1时,从事先经由探测装置6检测到的图案图像ma获知lh、lv线之间的线间距la和/或线夹角lw。
56.接着,在第二步骤st2中,例如在转弯行驶fk期间,在尚不知扭折角k的第二时间点t2时再次经由探测装置6检测图案图像ma。在第三步骤st3中,根据图案图像ma获知线间距变化dla和/或线夹角变化dlw(增量式方法),当挂车a相对于牵引车z或子车辆2.i彼此相对围绕转动轴线d扭转时,由于投影平面8b相对于在第一步骤st1中的起始状态发生枢转而得到该线间距变化和/或线夹角变化。在第四步骤st4中,从该线间距变化dla和/或线夹角变化dlw经由几何模型推断出从在第一步骤st1中已知的扭折角k出发的当前存在的仍旧未知的扭折角k或扭折角变化dk。
57.替选地或补充地,可以将在第二步骤st2中获知的图案图像ma与所保存的参考图案mr进行比较,并且在与参考图案mr相一致的情况下可以输出分别配属的扭折角k。
58.替选地或补充地,在提前校准图像平面的情况下,从在第二步骤st2中获知的图案图像ma也能够直接经由线间距la和/或线夹角lw通过几何观察获知扭折角lw(绝对性的方法)。
59.在此,在车辆组合1正在行驶时,步骤st2和st3以事先明确的时间步长连续进行。所获知的扭折角k然后可以输出给另外的车辆系统以供进一步使用。
60.附图标记列表
[0061]1ꢀꢀ
车辆组合
[0062]
2.i
ꢀꢀ
第i子车辆,其中,i=1、2、...n
[0063]3ꢀꢀ
鞍座主销
[0064]4ꢀꢀ
检测系统
[0065]5ꢀꢀ
投影装置
[0066]6ꢀꢀ
探测装置
[0067]
6a
ꢀꢀ
探测装置6的检测区域
[0068]7ꢀꢀ
处理单元
[0069]8ꢀꢀ
挂车a的前部面
[0070]
8a
ꢀꢀ
前部面8的部分区域
[0071]
8b
ꢀꢀ
前部面8上的投影平面
[0072]
a
ꢀꢀ
挂车
[0073]
d
ꢀꢀ
转动轴线
[0074]
dk
ꢀꢀ
扭折角变化
[0075]
dla
ꢀꢀ
线间距变化
[0076]
dlw
ꢀꢀ
线夹角变化
[0077]
fg
ꢀꢀ
直线行驶
[0078]
fk
ꢀꢀ
转弯行驶
[0079]
k
ꢀꢀ
扭折角
[0080]
la
ꢀꢀ
线间距
[0081]
lh
ꢀꢀ
水平延伸的线
[0082]
lv
ꢀꢀ
竖直延伸的线
[0083]
lw
ꢀꢀ
线夹角
[0084]
m
ꢀꢀ
预定的图案
[0085]
ma
ꢀꢀ
图案图像/投影图案
[0086]
mr
ꢀꢀ
(针对特定的扭折角的)参考图案
[0087]
n
ꢀꢀ
子车辆2.i的数量
[0088]
on
ꢀꢀ
不可见光谱
[0089]
os
ꢀꢀ
可见光谱
[0090]
s
ꢀꢀ
探测信号
[0091]
t1
ꢀꢀ
第一时间点
[0092]
t2
ꢀꢀ
第二时间点
[0093]
z
ꢀꢀ
牵引车
[0094]
st0、st1、st2、st3、st4
ꢀꢀ
方法的步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1