电动台车的制作方法
1.本公开涉及具有自动驾驶功能、操纵辅助功能的电动台车。
背景技术:
2.在电动轮椅那样的人搭乘型的电动台车中,不仅有由人进行操作而行驶的台车,还有具有通过障碍物探测传感器探测障碍物来使电动台车停止的功能的台车。在这样的电动台车中,在万一电动台车发生异常的情况下,为了防止因失控、碰撞导致的危险,通过使电动台车停止来确保安全。过去,为了使进行行驶用的驱动的电动部停止,在异常发生时,将供给用于电动部的电源的电源电路阻断(专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:jp专利第4134719号公报
技术实现要素:
6.本公开中的电动台车通过由电动机驱动器控制安装于驱动轮的电动机来行驶,所述电动台车具备:判断是否应停止所述驱动轮的驱动的安全控制部;和将许可使所述电动机动作的动作许可信号、以及控制所述电动机的动作的控制信号向所述电动机驱动器输出的驱动指令部,所述安全控制部在判断为应停止所述驱动轮的驱动的情况下,进行停止向所述电动机驱动器输入所述动作许可信号以及所述控制信号的控制。
附图说明
7.图1是本公开的第1实施方式中的电动台车的概要图。
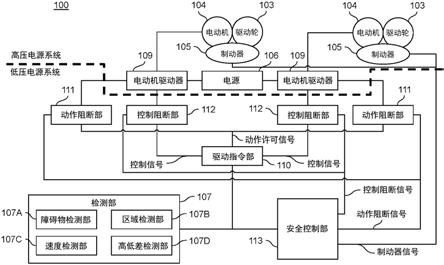
8.图2是本公开的第1实施方式中的停止控制的概要图。
9.图3是本公开的第2实施方式中的停止控制的概要图。
10.图4是本公开的第3实施方式中的停止控制的概要图。
11.图5是本公开的第4实施方式中的停止控制的概要图。
具体实施方式
12.如上述那样,过去,在电动台车发生异常时,通过阻断电源电路来将电动部的驱动停止,从而确保安全性。但为了阻断对电动部供给的大的电流,阻断电路常常会变大,重量也会变大。
13.本公开的目的在于,提供能以小型且轻量的方式安装能更可靠地停止行驶的结构的电动台车。
14.以下参考附图来说明本公开的实施方式。另外,对相同构成要素标注相同的附图标记。此外,为了易于理解,以各个构成要素为主体示意地示出附图。
15.《第1实施方式》
16.使用图1以及图2来说明本公开的电动台车。图1是从本公开的第1实施方式中的电动台车100的侧面观察的概要图。此外,图2是本公开的第1实施方式中的停止控制的概要图。
17.电动台车100包含主框架101、辅助轮102、驱动轮103、电动机104、制动器105、电源106、检测部107以及控制箱108。电源106是高压电源,对后述的电动机驱动器109、电动机104以及制动器105供给电力。即,如图2所示那样,电源106、电动机驱动器109、电动机104以及制动器105属于高压电源系统。
18.在主框架101设置就坐部101a、脚踏部101b、靠背部101c、扶手部101d。在扶手部101d设置操纵杆101e。
19.辅助轮102在电动台车100的前部左右设置一对。驱动轮103在电动台车100的后部左右设置一对,且旋转自由地由电动机104的未图示的旋转轴进行轴支承。电动机104对左右的驱动轮103分别设置,独立地驱动左右的驱动轮103。制动器105对左右的驱动轮103分别设置,对左右的驱动轮103进行制动。电源106向电动机104供给电力。
20.检测部107包含障碍物检测部107a、区域检测部107b、速度检测部107c、作为路面检测部的一例的高低差检测部107d当中的至少一者。检测部107与后述的驱动指令部110以及安全控制部113连接。
21.障碍物检测部107a例如配置于电动台车100的前方附近。障碍物检测部107a通过测量距周围物体的距离来检测障碍物,将检测到的信息输出到后述的安全控制部113。具体地,障碍物检测部107a例如是激光传感器,将红外线激光向电动台车100的周边照射,以每0.36度等细小的间距在水平方向上扫描约270度的以传感器为中心的扇形的区域。然后,障碍物检测部107a基于直至观察到其反射光为止的时间来检测距周围的物体的距离。另外,作为障碍物检测部107a,可以使用tof(time of flight,飞行时间)传感器。在该情况下,障碍物检测部107a通过比激光传感器更简单的结构实现。此外,作为障碍物检测部107a,也可以使用立体摄像机。在该情况下,障碍物检测部107a除了能取得纵深信息以外,还能取得颜色信息等。因此,能对周围环境、障碍物取得更详细的信息,从而实现精度高的动作控制、准确的障碍物回避。
22.区域检测部107b例如配置于电动台车100的前方附近。区域检测部107b检测当前的行驶区域是否是能安全行驶的能行驶区域、或者是否是危险区域这样的区域信息,将检测到的区域信息向安全控制部113输出。具体地,区域检测部107b接收来自固定于行驶环境侧的信号发射机的信号,检测当前的行驶区域是怎样的区域。
23.速度检测部107c例如与电动机104连接或配置于电动机104近旁。速度检测部107c检测电动台车100的行驶速度,将检测到的速度的信息向安全控制部113输出。具体地,速度检测部107c通过读取电动机104的旋转角度来算出电动机104还有驱动轮103的旋转速度,检测电动台车100的行驶速度。
24.高低差检测部107d例如配置于电动台车100的前方附近。高低差检测部107d检测行驶路面的高低差,将检测到的高低差的信息向安全控制部113输出。具体地,高低差检测部107d例如是激光传感器,将红外线激光向电动台车100的周边照射,以每0.36度等细小的间距在高度方向上扫描约270度的以传感器为中心的扇形的区域。然后,高低差检测部107d基于直至观察到该反射光为止的时间来检测距行驶路面的距离。然后,在距行驶路面的距
离变得不再连续的情况下、大幅变化了的情况下等,基于给定的条件判断为行驶路面有高低差。另外,作为高低差检测部107d,可以使用tof传感器。在该情况下,高低差检测部107d通过比激光传感器更简单的结构实现。此外,作为高低差检测部107d,也可以使用立体摄像机。在该情况下,高低差检测部107d除了能取得纵深信息以外,还能取得颜色信息等。因此,能对高低差取得更详细的信息,从而实现精度高的动作控制、准确的高低差回避。
25.另外,障碍物检测部107a、区域检测部107b、速度检测部107c以及高低差检测部107d分别可以是使检测状态信息的传感器类等结构、和将检测到的状态信息变换或运算成输出到安全控制部113的信息的处理器等结构合为一体而得的结构。
26.例如可以为了回避障碍物、生成路径等提升电动台车100的行驶性而进一步使用由检测部107检测到的信息。这时,期望不是由安全控制部113,而是由后述的驱动指令部110基于由检测部107检测到的信息来进行使行驶性提升的控制。即,期望分别构成为了提升行驶性而处理、输出检测部107的检测信息的结构和为了提升安全性而处理、输出检测部107的检测信息的结构。由此,不管哪一个结构发生了故障、不良等,在控制中发生了异常的情况下,都能通过另一个结构将电动台车100的动作停止。例如,在驱动指令部110的控制中发生了异常的情况下,如后述那样,基于由检测部107检测到的信息,安全控制部113进行控制,以便停止电动台车100的驱动。此外,在安全控制部113的控制中发生了异常的情况下,基于操纵杆101e的操作量,驱动指令部110进行控制,以便停止电动台车100的驱动。
27.在控制箱108设置电动机驱动器109、驱动指令部110、动作阻断部111、控制阻断部112以及安全控制部113。如上述那样,电动机驱动器109属于高压电源系统,但驱动指令部110、动作阻断部111、控制阻断部112以及安全控制部113属于低压电源系统。另外,对属于低压电源系统的驱动指令部110、安全控制部113等例如从电源106经由降压器供给电力。
28.为了减少排热给搭乘者带来的不适感,控制箱108、电源106等优选远离就坐部101a、靠背部101c等来设置。此外,为了减少电动台车100的重心位置变高而变得不稳定这样的情况,控制箱108、电源106等优选设置于电动台车100的下方。
29.电动机驱动器109若从电源106供给用于动作的电力,就控制各个电动机104的旋转,使电动机104动作。
30.电动机驱动器109通过从驱动指令部110输入动作许可信号而成为能控制电动机104的状态。之后,电动机驱动器109按照从驱动指令部110输入的控制信号对电动机104的旋转进行控制,使得电动机104动作。即,电动机驱动器109只要未从驱动指令部110输入动作许可信号,就不控制电动机104。例如,电动机驱动器109在未从驱动指令部110输入动作许可信号的状态下,在从驱动指令部110输入了控制信号时,不控制电动机104。
31.驱动指令部110在变得能对电动机驱动器109进行指令时,向电动机驱动器109输出动作许可信号。之后,驱动指令部110若输入了操纵杆101e的操作量,就基于操纵杆101e的操作量来决定电动机104的旋转速度,向电动机驱动器109输出控制信号。在此,控制信号包含基于电动机104的旋转速度的控制值。
32.在此,对变得能从驱动指令部110向电动机驱动器109进行指令时这一情况进行说明。例如,驱动指令部110可以是若检测到电动台车100的电源106的启动就发送动作许可信号。即,驱动指令部110在变得能进行行驶控制的情况下发送动作许可信号。这时,驱动指令部110也可以为了省电,而在检测到电动台车100停止了给定期间的情况下停止动作许可信
号的发送。此外,驱动指令部110也可以在未发生检测部107的故障、安全控制部113的异常等从而电动台车100没有行驶上的问题时,发送动作许可信号。在此,所谓异常,例如示出不对检测部107供给电源的状态、进行通信的结构彼此不能进行通信的状态等。驱动指令部110期望根据输入了来自检测部107的检测信息或进行了通信这样的情况,来确认是发生了这些状态还是并未发生,并在未发生的情况下发送动作许可信号。此外,驱动指令部110也可以在基于检测部107的检测信息而判断为电动台车100的周边环境不存在行驶上的问题时,发送动作许可信号。此外,驱动指令部110也可以在通过用户的手动操作而输入了指示时发送动作许可信号。例如,可以通过由搭乘者解除电动台车100中所含的制动器装置来进行,也可以利用能与电动台车100进行通信的终端等输入使电动台车100动作这样的用户的指示。此外,变得能从驱动指令部110向电动机驱动器109进行指令这一情况可以由驱动指令部110自动判断,也可以通过人的手来输入。
33.驱动指令部110也可以在判断为能向电动机驱动器109进行指令的期间,连续地发送动作许可信号,在变得不再能进行指令的情况下,停止动作许可信号的发送。
34.如此地,动作司令部10除了控制信号以外还发送动作许可信号。由此,动作司令部10即使在错误发送了控制信号的情况下,也能通过不发送动作许可信号来使错误发送的控制信号无效。因而,能使安全性提升。
35.在驱动指令部110的电动机104的旋转速度的决定中,不仅使用操纵杆101e的操作量,也还可以进一步使用例如与预先设定的速度相关的信息。在预先设定了最高速度的情况下,驱动指令部110决定电动机104的旋转速度,以使得电动台车100在所设定的最高速度以下动作。另外,驱动指令部110可以向各个电动机驱动器109同时输出动作许可信号或控制信号,也可以单独输入。此外,操纵杆101e例如可以是手柄、遥控器等其他形态。
36.动作阻断部111若从安全控制部113输入了动作阻断信号,就阻断从驱动指令部110向电动机驱动器109输入的动作许可信号。另外,在未从安全控制部113输入动作阻断信号时,动作阻断部111不阻断从驱动指令部110向电动机驱动器109输出的动作许可信号。
37.动作阻断部111是开关元件,例如由三态缓冲器构成。虽然采用对各电动机驱动器109各设置1个动作阻断部111的结构,但并不限于此,也可以由1个动作阻断部111来阻断从驱动指令部110对各电动机驱动器109输入的动作许可信号。其中,通过对各电动机驱动器109各设置1个动作阻断部111,在配合驱动轮103、电动机104来换装电动机驱动器109、或者使电动机驱动器109的数目增减时等,能使动作阻断部111与各个电动机驱动器109的规格简单地对应。
38.控制阻断部112若从安全控制部113输入了控制阻断信号,就阻断从驱动指令部110向电动机驱动器109输入的控制信号。另外,在未从安全控制部113输入控制阻断信号时,控制阻断部112不阻断从驱动指令部110向电动机驱动器109输出的控制信号。
39.控制阻断部112是开关元件,例如由三态缓冲器构成。可以采用对各电动机驱动器109各设置1个控制阻断部112的结构,但并不限于此,也可以由1个控制阻断部112来阻断从驱动指令部110对各电动机驱动器109输入的动作许可信号。其中,通过对各电动机驱动器109各设置1个控制阻断部112,在配合驱动轮103、电动机104来换装电动机驱动器109、或者使电动机驱动器109的数目增减时等,能使控制阻断部112与各个电动机驱动器109的规格简单地对应。
40.安全控制部113基于从检测部107输入的信息来判断是否需要停止电动台车100的驱动。安全控制部113在判断为需要停止电动台车100的驱动的情况下,分别以独立的路径对动作阻断部111输出动作阻断信号,对控制阻断部112输出控制阻断信号,停止电动机104的驱动。即,安全控制部113分别具有至少1个用于对动作阻断部111输入动作阻断信号的连接单元、和至少1个用于对控制阻断部112输入控制阻断信号的连接单元。
41.安全控制部113通过相互独立地控制动作许可信号的输出以及电动机104的动作,来停止电动机驱动器109的动作。在本实施方式中,安全控制部113通过相互独立地控制动作阻断部111以及控制阻断部112,来停止电动机驱动器109的电动机104的控制。由此,输入用于停止电动机104的驱动的信号的电路存在2个,能使电动机104的驱动更可靠地停止。此外,安全控制部113也可以与此同时或在经过固定时间后速度仍未充分减速的情况下,通过对制动器105输入制动器信号来使制动器105动作,对驱动轮103进行制动。另外,所谓未充分减速的情况,例如是指速度未成为零的情况。由此,输入用于停止电动机104的驱动的信号的电路存在3个,能使电动机104的驱动更可靠地停止。
42.在此,安全控制部113例如如以下那样进行是否需要停止电动台车100的驱动的判断。
43.安全控制部113在检测到由速度检测部107c检测到的电动台车100的速度例如超过预先设定的速度的情况下,判断为需要停止电动台车100的驱动。这时,具体地,考虑到由于驱动指令部110的异常等而不进行电动机驱动器109的正常的控制等事态,有可能发生失控、碰撞。
44.或者,安全控制部113在由障碍物检测部107a在非常近的近旁处检测到障碍物的情况下,判断为需要停止电动台车100的驱动。这时,具体地,有可能发生与近旁的障碍物的碰撞。或者,安全控制部113也可以更简单地,在由障碍物检测部107a在预先确定的区域内检测到障碍物的情况下,判断为需要停止电动台车100的驱动。这时,由于在检测到相对于电动台车100离开某种程度的距离的障碍物的时间点停止电动台车100的驱动,因此能预防碰撞。
45.或者,安全控制部113根据由速度检测部107c检测到的电动台车100的速度和由障碍物检测部107a检测到的距周围的障碍物的距离来判断需要停止电动台车100的驱动。更具体地,安全控制部113根据由速度检测部107c检测到的电动台车100的当前的行驶速度来推定将电动台车100制动的情况下所行驶的轨迹,在由障碍物检测部107a在该行驶轨迹的内部检测到障碍物的情况下,判断为需要停止电动台车100的驱动。这时,在电动台车100的推定行驶路径中存在障碍物,有可能发生碰撞。
46.或者,安全控制部113在由高低差检测部107d检测到行驶路面的凹的高低差的情况下,判断为需要停止电动台车100的驱动。这时,具体地,考虑到会由于凹的高低差而使电动台车100摔倒或掉落,有可能会发生搭乘者的掉落、给位于高低差下方的周边者带来危害。
47.或者,安全控制部113基于由区域检测部107b检测到的区域信息来判断为需要停止电动台车100的驱动。具体地,安全控制部113基于当前的行驶区域是否是危险的区域来判断是否需要停止电动台车100的驱动。例如也可以在能行驶区域设置发射机,在安全控制部113接收信号的期间判断为是能行驶区域,在信号中断的情况下判断为是危险区域。此
外,也可以在危险区域设置发射机,在安全控制部113接收到信号的情况下判断为是危险区域。此外,也可以对设置在行驶环境上的信号发射机的信号附加id、属性信息,安全控制部113根据其内容来进行是能行驶区域还是危险区域的判断。
48.驱动指令部110和安全控制部113可以通过在相同的微型计算机上构成等而兼有,但期望通过将微型计算机内的核心分开等而分别构成。更期望的是,驱动指令部110和安全控制部113可以通过由另外的微型计算机等构成等而在物理上分别构成。据此,不管哪一个发生了故障、不良等,在控制中发生了异常的情况下,都能通过另一个将电动台车100的动作停止。例如,在驱动指令部110的控制中发生了异常的情况下,基于由检测部107检测到的信息,安全控制部113进行控制,以便停止电动台车100的驱动。此外,在安全控制部113的控制中发生了异常的情况下,例如将发生异常的事实使用显示装置、报知装置等通知给用户。据此,用户侧能认识到安全控制部113不能工作这一情况,有助于基于用户的操纵杆101e的操作量由驱动指令部110进行控制,以便停止电动台车100的驱动。此外,例如可以对安全控制部113进行设计,使得在安全控制部113的控制中发生了异常的情况下,安全控制部113自动输出动作阻断信号以及控制阻断信号。这样一来,在安全控制部113发生了异常的时间点,能停止电动台车100的驱动,能进行安全性更高的行驶。
49.在构成安全控制部113的情况下,在电动台车100配置检测部107,使其与安全控制部113以有线或无线方式连接。或者,将已经装备于电动台车100的检测部107和安全控制部113以有线或无线方式连接。接下来,在用于从驱动指令部110向电动机驱动器109输入动作许可信号的连接单元间配置动作阻断部111,将动作阻断部111和安全控制部113以有线或无线方式连接。此外,在用于从驱动指令部110向电动机驱动器109输入控制信号的连接单元间配置控制阻断部112,将控制阻断部112和安全控制部113以有线或无线方式连接。其中,动作阻断部111以及控制阻断部112和安全控制部113期望以尽可能快的响应速度做出反应,优选有线连接。
50.驱动指令部110、安全控制部113能通过计算机程序实现。通过程序实现上述的驱动指令部110、安全控制部113的计算机例示地可以具备处理器、输出装置、存储器、贮存器以及电源电路。这些构成要素能与总线连接从而相互能进行通信。
51.处理器是具备运算能力的电路或器件的一例。处理器例如可以使用cpu(central processing unit,中央处理器)、mpu(micro processing unit,微处理器)以及gpu(graphics processing unit,图形处理器)中的至少一者。
52.输出装置例如可以包含显示器(或监视器)。
53.存储器例如存储由处理器执行的程序以及对应于程序的执行而被处理的数据或信息。存储器可以包含ram(random access memory,随机存取存储器)以及rom(read only memory,只读存储器)。ram可以用于处理器的工作存储器。“程序”也可以称作“软件”或“应用”。
54.贮存器存储由处理器执行的程序以及对应于程序的执行而被处理的数据或信息。贮存器例如可以包含硬盘驱动器(hdd)或固态硬盘(ssd)这样的半导体驱动器装置。也可以进行半导体驱动器装置的追加或代替,在贮存器中包含闪速存储器这样的非易失性存储器。
55.程序以及/或者数据可以以记录于计算机(处理器)可读的记录介质的形态提供。
作为记录介质的一例,能举出软盘、cd-rom、cd-r、cd-rw、mo、dvd、蓝光盘、移动硬盘等。此外,usb(universal serial bus,通用串行总线)、存储器等半导体存储器也是记录介质的一例。
56.此外,程序以及/或者数据例如可以从服务器经由通信线路提供(下载)到计算机。例如可以经过通信装置将程序以及/或者数据提供到计算机,并存储到存储器以及/或者贮存器。此外,程序以及/或者数据可以经过输入装置提供到计算机,并存储到存储器以及/或者贮存器。
57.另外,在本实施方式中,示出动作阻断部111阻断从驱动指令部110向电动机驱动器109输出的动作许可信号的示例,但并不限于此。例如,也可以通过对来自电源106的电压进行分压来生成动作许可信号。在该情况下,动作阻断部111也构成为将动作许可信号阻断。此外,也可以不设置动作阻断部111,而通过将不使动作许可信号输出的动作不许可信号从安全控制部113输出到驱动指令部110,从而使电动机驱动器109的动作停止。此外,也可以不设置控制阻断部112,而通过从安全控制部113向驱动指令部110输出将向电动机104供给的电力供给量设为0的控制信号,从而使电动机驱动器109的动作停止。
58.另外,安全控制部113也可以基于速度检测部107c检测到的电动台车100的行驶速度来确认电动台车100的停止经过了固定时间,从而解除阻断。具体地,安全控制部113在确认到电动台车100的停止经过了固定时间的情况下,停止控制阻断信号以及动作阻断信号的输出。或者,安全控制部113也可以基于检测部107的检测信息来确认电动台车100的周边环境不存在行驶上的问题,从而解除阻断。具体地,安全控制部113基于未由障碍物检测部107a检测到障碍物时、或者由区域检测部107b检测到的当前的行驶区域不是危险的区域时、或者未由高低差检测部107d检测到高低差时的任一者,来停止控制阻断信号以及动作阻断信号的输出。或者,安全控制部113也可以通过用户的手动操作来解除阻断。具体地,安全控制部113在由搭乘者、同伴者等通过输入装置(例如可以是如开关那样仅输入意向的装置,也可以是包含触控面板等显示部且提示其他信息的装置)输入了解除阻断的指示的情况下,停止控制阻断信号以及动作阻断信号的输出。
59.另外,关于电动台车100中所含的结构,并不需要限于图1所示的配置、形状、大小,能配合电动台车100的设计而适当变更。
60.如上述那样,本公开所涉及的电动台车100取代将电源电路阻断的阻断电路而具备:阻断从动作司令部110发送的动作许可信号的动作阻断部111;和阻断控制信号的控制阻断部112。由于电源电路属于高压电源系统,因此阻断电路大型且很重。另一方面,配置于驱动指令部110与电动机驱动器109之间的动作阻断部111以及控制阻断部112属于低压电源系统。因此,本公开中的电动台车100能以小型且轻量的方式安装能更可靠地停止行驶的结构。
61.《第2实施方式》
62.基于图3来说明本公开的第2实施方式所涉及的电动台车100a。图3是本公开的第2实施方式中的停止控制的概要图。
63.在此,在第2实施方式所涉及的电动台车100a中,主要说明与第1实施方式所涉及的电动台车100不同的点。具体地,在第2实施方式所涉及的电动台车100a中,检测部、安全控制部以及驱动指令部的连接关系不同。
64.如图3所示那样,检测部107仅与安全控制部113a连接。驱动指令部110a经由安全控制部113a取得检测部107所输出的信息。
65.具体地,安全控制部113a具备管理部114。管理部114对检测部107进行管理,取得检测部107所输出的信息,将所取得的信息输出到驱动指令部110a。
66.即,安全控制部113a比驱动指令部110a更先取得从检测部107输出的信息,并确认其内容。因此,安全控制部113a能确认输入到驱动指令部110a的信息。进而,安全控制部113a能保证驱动指令部110a和安全控制部113a根据相同的检测部107的信息而动作。由于检测部107的输出目的地单一,因此即使是输出信号的分支很困难的检测部也能应用。
67.安全控制部113a也可以仅在基于来自检测部107的信息判定为是安全状态的情况下,对驱动指令部110a输出来自检测部107的信息。在该情况下,安全控制部113a能基于判断为是安全状态的检测部107的信息来使驱动指令部110a动作。
68.在第1实施方式所涉及的电动台车100中,对检测部107的反馈成为驱动指令部110以及安全控制部113这2个系统。另一方面,在本实施方式中,管理部114能统一管理对检测部107的反馈。
69.《第3实施方式》
70.基于图4来说明本公开的第3实施方式所涉及的电动台车100b。图4是本公开的第3实施方式中的停止控制的概要图。
71.在此,在第3实施方式所涉及的电动台车100b中,主要说明与第1实施方式所涉及的电动台车100不同的点。具体地,在第3实施方式所涉及的电动台车100b中,具有监视动作阻断部111以及控制阻断部112的动作的功能。
72.如图4所示那样,本实施方式所涉及的安全控制部113b具备第1监视部115以及第2监视部116。第1监视部115监视从动作阻断部111输出到电动机驱动器109的信号。第2监视部116监视从控制阻断部112输出到电动机驱动器109的信号。
73.由此,安全控制部113b能在输出了动作阻断信号以及控制阻断信号的情况下,确认动作阻断部111以及控制阻断部112分别是否正常地发挥功能。
74.另外,安全控制部113b也可以具备将2个监视部的功能合并而得的单一的监视部。此外,第2实施方式所涉及的安全控制部113a也可以具备第1监视部115以及第2监视部116。
75.《第4实施方式》
76.基于图5来说明本公开的第4实施方式所涉及的电动台车100c。图5是本公开的第4实施方式中的停止控制的概要图。
77.在此,在第4实施方式所涉及的电动台车100c中,主要说明与第1实施方式所涉及的电动台车100不同的点。具体地,在第4实施方式所涉及的电动台车100c中,输出动作阻断信号的结构和输出控制阻断信号的结构是独立的。
78.如图5所示那样,本实施方式所涉及的安全控制部113c具备第1判断部117以及第2判断部118。第1判断部117在基于来自检测部107的信息判断为需要停止电动台车100c的驱动的情况下,对动作阻断部111输出动作阻断信号。第2监视部116在基于来自检测部107的信息判断为需要停止电动台车100c的驱动的情况下,对控制阻断部112输出控制阻断信号。
79.第1判断部117和第2判断部118期望通过将相同的微型计算机内的核心分开等而分别构成。进一步期望的是,第1判断部117和第2判断部118通过由另外的微型计算机等构
成等而在物理上分别地构成。
80.第1判断部117以及第2判断部118进行相互监视,监视另一方是否正常动作。由此,在第1判断部117或第2判断部118发生了故障的情况下,也能可靠地输出基于另一个判断部的阻断信号。
81.产业上的可利用性
82.本公开的电动台车对于需要室内外的移动的区域来说是有用的。
83.附图标记说明
84.100 电动台车
85.101 主框架
86.101a 就坐部
87.101b 脚踏部
88.101c 靠背部
89.101d 扶手部
90.101e 操纵杆
91.102 辅助轮
92.103 驱动轮
93.104 电动机
94.105 制动器
95.106 电源
96.107 检测部
97.107a 障碍物检测部
98.107b 区域检测部
99.107c 速度检测部
100.107d 高低差检测部(路面检测部)
101.108 控制箱
102.109 电动机驱动器
103.110 驱动指令部
104.111 动作阻断部
105.112 控制阻断部
106.113 安全控制部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1