方向切换可变制动器脱离接合的制作方法
1.本公开大体上涉及一种用于机器的制动系统,并且例如,涉及在机器的方向切换期间的可变制动器脱离接合。
背景技术:
2.电液制动阀可用于机器,例如履带型拖拉机和其它类型的土方移动机器中,以施加和释放制动装置。电子控制器可以通过响应于检测到机器操作者对制动控制装置的致动或释放而将制动命令电流传输到制动阀来控制制动阀。制动阀通过改变制动装置内的压力以根据命令收紧或松开制动装置来响应制动命令电流。然而,在一些情况下,在发布制动命令与制动装置实现命令制动之间可能存在时间延迟。例如,与液压流体移动通过制动阀和相关联的液压通路相关联的时间延迟可在使制动装置脱离接合的命令之后发生。
3.在机器的方向切换(例如,从前进到倒车或从倒车到前进)期间,可以自动地传输命令制动装置接合的制动器命令电流,以便使机器减慢从而改变到新方向,并且在预设的固定速度下,可以自动地传输命令制动装置脱离接合的制动器命令电流,以允许机器在新方向上移动。然而,由于与使制动装置脱离接合相关联的时间延迟(例如,可变时间延迟)以及机器为实现方向切换而减速的特定速率,固定速度下的制动器命令可能导致制动装置过早或太晚脱离接合。过早发生脱离接合可能使减速率降低,这可能使机器的操作者感到不安并延长方向切换。太晚发生脱离接合可能使机器在零速度停顿,从而阻止机器在新方向上移动。
4.在2006年8月29日颁发给takamura等人的第7,097,021号美国专利(
“’
021专利”)中公开了一种用于工业车辆的控制装置的一次尝试,所述工业车辆在行进方向切换到相反方向时不产生速度变化冲击。具体地,’021专利公开了当在车辆运行期间切换行进方向时,车辆首先通过制动器施加的制动逐渐减速。’021专利还公开了,当车辆速度下降到指定速度以下时,在车辆速度达到零之前,通过接合对应于所选择的行进方向的变速器的前进离合器或倒车离合器而产生的制动器的制动力和发动机制动扭矩均被控制。’021专利指出,结果是方向反转之前的减速度扭矩和方向反转之后的加速度扭矩被控制为基本恒定值,使得减小在行进方向反转的时间点附近的加速度波动。
5.虽然’021专利的控制装置可以解决车辆的行进方向被切换时的速度变化冲击,但’021专利没有解决由于与使制动器脱离接合相关联的时间延迟而过早或太晚发生制动器脱离接合。例如,’021专利没有解决与以固定速度命令制动器脱离接合相关联的问题,这没有考虑与使制动装置脱离接合相关联的时间延迟(例如,可变时间延迟)和/或执行方向切换的机器的特定减速率。
6.本公开的制动系统解决了上述问题中的一个或多个问题和/或现有技术中的其它问题。
技术实现要素:
7.根据一些实施方式,一种方法可包括:确定速度阈值,所述速度阈值基于机器的动力系统的输出速度的减速度,所述减速度部分地由在所述机器的移动中的方向切换期间所述机器的一个或多个制动器的接合引起,所述速度阈值是所述一个或多个制动器将被命令脱离接合时所述动力系统的输出速度;以及基于确定所述动力系统的输出速度满足所述速度阈值,命令所述一个或多个制动器脱离接合。
8.根据一些实施方式,一种制动系统可包括一个或多个制动器,以及控制器,所述控制器被配置成:识别将引起方向切换的命令;基于识别所述命令,确定速度阈值,所述速度阈值基于动力系统的输出速度的减速度,所述减速度部分地由在所述方向切换期间所述一个或多个制动器的接合引起,所述速度阈值是所述一个或多个制动器将被命令脱离接合时所述动力系统的输出速度;以及基于确定所述动力系统的输出速度满足所述速度阈值,命令所述一个或多个制动器脱离接合。
9.根据一些实施方式,一种机器可包括动力系统、一个或多个制动器,以及控制器,所述控制器被配置成:确定速度阈值,所述速度阈值基于所述动力系统的输出速度的减速度和制动命令与所述一个或多个制动器的相应脱离接合之间的时间延迟,所述减速度部分地由在所述机器的移动中的方向切换期间所述一个或多个制动器的接合引起,所述速度阈值是所述机器的一个或多个制动器将被命令脱离接合时所述动力系统的输出速度;以及基于确定所述动力系统的输出速度满足所述速度阈值,命令所述一个或多个制动器脱离接合。
附图说明
10.图1是本文描述的示例性机器的图。
11.图2是本文描述的示例性实施方式的图。
12.图3是本文描述的示例性实施方式的图。
13.图4是用于方向切换可变制动器脱离接合的示例性过程的流程图。
具体实施方式
14.图1是包括控制器12的示例性机器10的图。如图1中所示,机器10体现为履带型机器,例如履带型拖拉机。替代地,机器10可以是反铲装载机、滑移转向装载机、轮式装载机、自动平地机、挖掘机、刮土机、农业拖拉机、拖运卡车等。
15.如图1中所示,机器10可包括框架组件14和电源16。电源16可包括被配置成向机器10提供动力的一个或多个电池、一个或多个发动机(例如,柴油发动机)、一个或多个发电机等。例如,电源16可以向机器10的动力系统(图1中未示出)提供动力,所述动力系统可包括电机(例如,电动机)、变速器(例如,电动变速器、液压变速器、机械变速器、连续可变变速器等)等等。动力系统可以与机器10的电驱动系统或机器10的连续可变变速器相关联。
16.机器10还可以包括用于推进机器10的一组地面接合构件18,例如轮、履带、辊等。此外,机器10可包括操作室20,该操作室可包括用于控制和/或监测机器10的操作的一个或多个输入装置(图1中未示出),例如一个或多个按钮、控制杆、方向盘等。
17.在一些实施方式中,机器10可包括液压泵(未示出)。液压泵可以可操作地联接到
电源16,以经由软管22将加压液压流体提供到用于使机器10的工具和器具(例如前附接件26和/或后附接件28)移动的液压缸24。前附接件26可包括刮板组件等。后附接件28可包括松土机组件、卷扬机组件、牵引杆组件等。
18.此外,机器10可包括制动系统(图1中未示出),该制动系统被配置成减慢和/或阻止机器10的移动。制动系统可包括一个或多个制动器,例如电液制动器。电液制动器可包括电液制动阀和由电液制动阀控制的制动装置。例如,电液制动阀可以控制液压流体施加在活塞上的压力,该活塞控制制动装置的接合和脱离接合。
19.控制器12(例如,电子控制模块(ecm))可包括一个或多个存储器和一个或多个处理器,所述一个或多个存储器和一个或多个处理器实施与机器10的方向切换期间的可变制动器脱离接合相关联的操作,如下文结合图2描述的。例如,控制器12可以被配置成:识别将引起机器10的方向切换的命令;基于识别所述命令,确定速度阈值,所述速度阈值基于动力系统的输出速度的减速度,所述减速度部分地由在方向切换期间制动器的接合和/或动力系统的减速引起;以及基于确定动力系统的输出速度满足速度阈值而命令制动器脱离接合。
20.方向切换可以指机器10的移动方向(例如,通过机器10的动力系统,例如通过机器10的变速器)从前进方向变成倒车方向或从倒车方向变成前进方向的过程。因此,方向切换可以在命令在与当前移动方向相反的方向上移动时开始,并且可以在开始在相反方向上移动时结束。
21.如上所述,提供图1作为实例。其它实例可以与结合图1描述的实例不同。
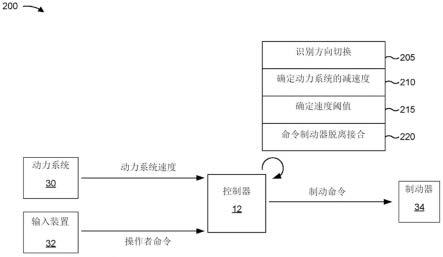
22.图2是本文描述的示例性实施方式200的图。如图2所示,示例性实施方式200可以涉及机器10的制动系统,该制动系统包括控制器12、动力系统30、输入装置32和一个或多个制动器34,如上文结合图1描述的。例如,制动器34可以是电液制动器,其与使制动器34脱离接合的命令和制动器34的相应脱离接合之间的时间延迟相关联。动力系统30可包括电机(例如,电动机)、变速器(例如,电动变速器、液压变速器、机械变速器、连续可变变速器等)等等。
23.如图2中所示,控制器12可以接收与动力系统30的速度(例如,输出速度)有关的信息。与动力系统30的速度有关的信息可包括动力系统30的每分钟转数(rpm)。动力系统30的速度可以与动力系统30的电机的速度(例如,rpm)、动力系统30的变速器的输出速度(例如,rpm)等相关联。另外,控制器12可以(例如,经由输入装置32)接收与由机器10的操作者提供的一个或多个操作者命令有关的信息。一个或多个操作者命令可以涉及机器10的方向切换。
24.如图2中所示并且如附图标记205所示,控制器12可识别机器10的方向切换。也就是说,控制器12可识别机器10将执行方向切换。控制器12可以基于由控制器12(例如,经由输入装置32)接收的一个或多个操作者命令识别机器10的方向切换。例如,操作者命令可以命令机器10的前进速度,随后是命令机器10的倒车速度的操作者命令,由此使得控制器12能够确定方向切换。其它操作者命令可以另外或替代地指示机器10的方向切换。
25.基于识别方向切换,控制器12可以命令制动器34接合和/或命令动力系统30减速(例如,电机、变速器等减速)以实现方向切换。例如,制动器34的接合和/或动力系统30的减速可以引起机器10减速,并且引起动力系统30的速度相应减速,从而根据方向切换实现方
向的改变。控制器12可以在方向切换期间维持制动器34的接合,直到动力系统30的速度(例如,电机、变速器等的速度)满足速度阈值,此时控制器可以命令制动器34脱离接合。如下文所描述的,速度阈值可以基于动力系统30的减速度(例如,电机、变速器等的减速度),并且因此可以是可变的。
26.如附图标记210所示,控制器12可以(例如,在方向切换期间)确定动力系统30的减速度。例如,控制器12可以如上文所述基于与动力系统30的速度(例如,电机、变速器等的速度)(例如,rpm)有关的信息确定动力系统30的减速度(例如,rpm/秒)。控制器12可以从与动力系统30相关联(例如,与电机、变速器等相关联)的速度传感器接收与动力系统30的速度有关的信息。基于动力系统30的速度,控制器12可以确定动力系统30的减速度为动力系统30的速度相对于时间的导数。在一些实施方式中,控制器12可以使用一个或多个滤波器和/或一个或多个其它信号处理技术处理所确定的导数以确定减速度。例如,控制器12可以利用一个或多个滤波器处理所确定的导数以去除噪声或者执行导数的量值的饱和以去除噪声。
27.如附图标记215所示,控制器12可以(例如,在方向切换期间)确定速度阈值,所述速度阈值表示制动器34将被命令脱离接合时动力系统30的速度(例如,电机、变速器等的速度)(例如,输出速度)。速度阈值可以基于所确定的动力系统30的减速度。换句话说,控制器12可以根据动力系统30的减速度确定速度阈值。因此,由于动力系统30的减速度变化,速度阈值可以视具体情况而变化。
28.另外,速度阈值还可以基于使制动器34脱离接合的命令与制动器34的相应脱离接合之间的时间延迟。即,控制器12传输使制动器34脱离接合的命令的第一时间与制动器34响应于该命令而脱离接合的第二时间之间的时间延迟。在此类情况下,控制器12可以确定速度阈值为减速度和时间延迟的乘积。
29.时间延迟可以是基于制动器34的一个或多个属性的估计值,所述一个或多个属性是例如制动器34的液压流体(例如,使得制动器34脱离接合的液压流体)的温度,制动器34的电液制动阀中的液压流体的流动特性(例如,通过电液制动阀的液压流体的流动能力或流动速率),与电液制动阀相关联的活塞的面积,制动器34的估计磨损量(例如,基于自先前更换制动装置以来经过的时间,自先前更换制动装置以来机器10行进的距离等),等等。因此,时间延迟的估计值可随温度和/或制动器34的使用而变化。
30.此外,速度阈值还可以基于偏移值,该偏移值可以是大于或等于零的恒定值。偏移值可以是添加到速度阈值的速度(例如,rpm)(例如,以确保速度阈值是大于零的速度)。如上所述,偏移值可以补偿在使制动器34脱离接合的命令与制动器34的相应脱离接合之间的不是由制动器34的属性引起的延迟。例如,延迟可以是软件延迟、硬件延迟、由于估计误差导致的延迟、由于滤波误差导致的延迟等。
31.如附图标记220所示,控制器12可以基于确定动力系统30的速度(例如,电机、变速器等的速度)满足速度阈值(例如,动力系统30的速度小于或等于速度阈值)来(例如,在方向切换期间)传输使制动器34脱离接合的命令。例如,控制器12可以(例如,基于与可由一个或多个速度传感器提供给控制器12的动力系统30的速度有关的信息)监测动力系统30的速度,并且可以在动力系统30的速度满足速度阈值时传输使制动器34脱离接合的命令。在一些实施方式中,命令可以包括指示制动器34将脱离接合的标志。
32.如上所述,提供图2作为实例。其它实例可能与结合图2描述的不同。
33.图3是本文描述的示例性实施方式300的图。具体地,图3示出了如本文其它地方描述的在机器(例如,机器10)的方向切换期间制动器脱离接合的实例。
34.如图3中所示并且如线305表示的,机器的动力系统的速度(例如,动力系统30,例如电机、变速器等的速度)可响应于机器的操作者命令的方向切换而开始下降。例如,如图3中所示,动力系统的减速度可以由响应于所命令的方向切换而使一个或多个制动器(例如,制动器34)接合和/或使机器的动力系统减速(例如,使电机、变速器等减速)而引起。如线310表示的,可以基于动力系统的减速度来(例如,由机器的控制器)确定速度阈值,如上文结合图2描述的。速度阈值可以表示制动器将被命令脱离接合时动力系统的速度(例如,输出速度)。
35.如在点315处所示,在方向切换期间,动力系统的速度可以下降,直到动力系统的速度满足速度阈值。如上文结合图2描述的,机器的控制器可以监测动力系统的速度,以便确定动力系统的速度何时满足速度阈值。
36.基于动力系统的速度满足速度阈值,可以在第一时间320传输使制动器脱离接合的命令。例如,控制器可以传输使制动器脱离接合的命令。如图3中所示,在传输使制动器脱离接合的命令的第一时间320与制动器响应于该命令脱离接合的第二时间325之间可能发生时间延迟。然而,如图3中所示,尽管存在时间延迟,但制动器在动力系统的速度为零之前脱离接合,如在点330处所示。
37.如上所述,提供图3作为实例。其它实例可能与结合图3描述的不同。
38.图4是方向切换可变制动器脱离接合的示例性过程400的流程图。图4的一个或多个过程框可以由控制器(例如,控制器12)执行。另外或替代地,图4的一个或多个过程框可以由与控制器12分开或包括该控制器的另一装置或一组装置(例如,机器10内部或外部的另一装置或部件)执行。
39.如图4中所示,过程400可包括确定速度阈值,所述速度阈值基于机器的动力系统的输出速度的减速度,所述减速度部分地由在机器的移动中的方向切换期间机器的一个或多个制动器的接合引起(框410)。例如,控制器(例如,使用处理器、存储器、存储部件、输入部件、通信接口等)可以如上文所描述确定速度阈值,所述速度阈值基于机器的动力系统的输出速度的减速度,所述减速度部分地由在机器的移动中的方向切换期间机器的一个或多个制动器的接合引起。动力系统的输出速度可以与动力系统的电机或动力系统的变速器相关联。
40.在一些实施方式中,过程400还可以包括命令在机器的移动中的方向切换。附加地或替代地,过程400还可以包括识别将引起方向切换的命令。将引起方向切换的命令可以使得一个或多个制动器接合。另外,过程400还可以包括基于动力系统的输出速度确定动力系统的输出速度的减速度。
41.速度阈值可以是一个或多个制动器将被命令脱离接合时动力系统的输出速度。此外,速度阈值可以基于动力系统的输出速度的减速度以及制动命令与一个或多个制动器的相应脱离接合之间的时间延迟。例如,速度阈值可以是输出速度的减速度和时间延迟的乘积。时间延迟可以是估计值,该估计值基于使得一个或多个制动器相应脱离接合的液压流体的温度。该估计值还可以基于一个或多个制动器的阀中的液压流体的流动特性或一个或
多个制动器的估计磨损量中的至少一者。此外,速度阈值还可以基于偏移值,如上文所述。
42.如图4中还示出的,过程400可包括基于确定动力系统的输出速度满足速度阈值来命令一个或多个制动器脱离接合(框420)。例如,控制器(例如,使用处理器、存储器、输出部件、通信接口等)可以如上所述基于确定动力系统的输出速度满足速度阈值来命令一个或多个制动器脱离接合。
43.在一些实施方式中,过程400还可以包括监测动力系统的输出速度,以便确定动力系统的输出速度是否满足速度阈值。另外,命令一个或多个制动器脱离接合可以使得一个或多个制动器在动力系统的输出速度为零之前脱离接合。一个或多个制动器可以是电液制动器,如上文所述。
44.尽管图4示出了过程400的示例性框,但是在一些实施方式中,与图4中描绘的那些框相比,过程400可以包括附加的框、更少的框、不同的框或不同布置的框。附加地或替代地,可并行执行过程400的两个或更多个框。
45.工业适用性
46.所公开的制动系统可以与期望在方向切换期间改进性能的任何机器一起使用。特别地,所公开的制动系统可以使得能够在机器的速度接近达到零但在达到零之前使机器的制动器脱离接合。这样,机器可以在方向切换期间具有平稳的减速度,不会突然丧失减速度,这种情况使操作者感到不安且延长方向切换,并且可能由于制动器的提前脱离接合而发生。此外,机器可以在方向切换期间改变方向,不会以零速度延长延迟,这种情况可能由于制动器的过晚脱离接合而发生。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1