用于确定轨道车辆的车轮-轨道附着力值的系统的制作方法
1.本发明总体上涉及轨道车辆领域,具体地,本发明涉及一种用于确定轨道车辆的车轮-轨道附着力值的系统。
背景技术:
2.用于测量车轮-轨道附着力的现有技术,基本上是基于视觉或反射光传感器的“间接”解决方案,或者实施专门用于估计附着力的制动或牵引控制的“直接”解决方案。例如,第二类包括例如向一个或多个轴施加已知的制动力并检测其转速响应的技术方案。利用制动力和角加速度,容易推断出车轮-轨道接触中可获得的附着力。
3.然而,不利的是,基于视觉或反射的光学解决方案基本上不被使用,因为它们必须通过复杂的校准过程进行适当地预校准,然而这些校准过程易受系统运行时的能见度和照明的环境条件的影响。
4.另一方面,直接附着力测量虽然可靠,但只能在向车轴施加制动扭矩的情况下进行。因此,该测量只能在制动阶段进行,除非实施了专用制动控制,例如,定期施加已知制动力并检测车轴的角加速度响应。不利的是,专门的控制解决方案允许以所需的时空分辨率测量附着力,但要求对轨道车辆的至少一根车轴定期施加制动力,这对车辆行驶来说不是必需的。
技术实现要素:
5.本发明的目的是提供一种用于确定轨道车辆的车轮-轨道附着力值的系统,该系统能够在使用期间例如基于人工智能技术进行自校准。用于确定轨道车辆的车轮-轨道附着力值的系统基于直接附着力测量的基础上校准光学传感器的结果,由于采用了上述系统,由于系统的自校准过程将累积一系列事件,即直接附着力测量,基于光学传感器的间接测量的解释将越来越可靠。通过适当校准的系统获得的间接测量的可靠性,将允许可靠和连续地测量车轮-轨道附着力,同时将允许减少或消除仅用于测量附着力的制动的需要。
6.根据本发明的一个方面,通过具有技术方案1中限定的特征的用于确定轨道车辆的车轮-轨道附着力值的系统来实现上述和其它目的和优点。在从属权利要求中限定了本发明的优选实施例,其内容应理解为本说明书的组成部分。
附图说明
7.现在将参考附图描述根据本发明的用于确定轨道车辆的车轮-轨道附着力值的系统的一些优选实施例的功能和结构特征。其中:
8.图1示出了用于确定轨道车辆的车轮-轨道附着力值的系统的实施例;以及
9.图2示出了用于确定轨道车辆的车轮-轨道附着力值的系统的另一实施例。
10.图3a和3b分别示出了通过向车轴施加制动力的直接附着力测量的示例。
具体实施方式
11.在详细描述本发明的多个实施例之前,应当清楚的是,本发明的应用不限于在以下描述中呈现的或在附图中示出的部件的构造细节和配置。本发明能够采用其它实施例,并且能够以不同的方式在实践中实施或构造。还应当理解,措辞和术语具有描述性目的,并且不应当被解释为限制性的。“包括”和“包含”及其变形的使用应理解为包括以下列出的要素及其等同物,以及附加要素及其等同物。
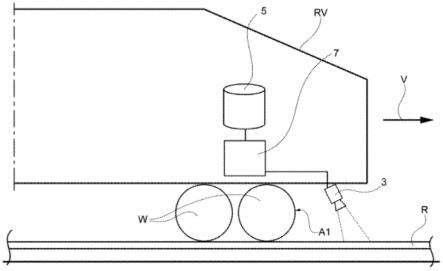
12.首先参考图1,示出了用于确定轨道车辆rv的车轮w和轨道r之间的附着力值的系统。
13.该系统包括光学信息获取装置3和数据库5,光学信息获取装置3用于从轨道r获取光学信息,数据库5用于至少在学习阶段存储光学信息,并将光学信息与车轮w和轨道r之间的相应的实际附着力值相关联,实际附着力值为在光学信息获取装置3获取光学信息时实际测量的。显然,数据库5可以设置成存储光学信息,并将光学信息与车轮w和轨道r之间的相应的实际附着力值相关联,该实际附着力值为在光学信息获取装置3获取光学信息时实际测量的,甚至在初始学习阶段之后的使用期间测量,以便即使在系统的操作使用期间也继续对系统进行训练。
14.换句话说,在数据库5中,光学信息可以为车轮w和轨道r之间的相应的实际附着力值的函数。
15.可以通过制动轨道车辆rv的车轴并分析车轴的行为来测量车轮w和轨道w之间的实际附着力值。仅制动一根车轴的情况不影响轨道车辆的行为,因为单根制动轴不足以影响轨道车辆的运动动态。以这种方式,可以测量实际车轮-轨道附着力值,而不会对轨道车辆的速度和轨道车辆上乘客的舒适度产生负面影响。优选地,轨道车辆的车轴直到该车轴开始打滑或达到预定极限值时进行制动。
16.如图3a和图3b所示,通过向车轴施加(专用)制动力来示出直接附着力测量的两个示例。
17.在该图中,300表示对于车轴来说的最大制动力,该最大制动力可能是所讨论的示例性轨道车辆所要求的。通常,最大制动力是在紧急制动期间施加的制动力。
18.直接附着力测量的过程包括以逐渐递增的方式,将制动力302施加至一个或多个车轴上。如图3a所示,如果达到最大制动力300,或者如图3b所示,如果所讨论的车轴开始打滑,即车轴的切向速度304偏离车辆的行驶速度306,逐渐递增中断,使制动力回到零。
19.在图3a的情况下,不可能量化车轮-轨道附着力,但是可以说车轮-轨道附着力足以施加最大制动力,例如紧急制动。通常,紧急制动的附着力约为0.15。因此,在图3a的情况下,可以说车轮-轨道附着力大于例如0.15。
20.在任何情况下,在附着力测量值超过紧急制动所需的附着力的情况下,附着力测量值并不特别重要。
21.或者,在图3b的情况下,车轮-轨道附着力不足以施加最大制动力,一旦达到如虚线所示的特定的制动力值,车轴开始打滑。此时,制动力立即重置为零并且车轴恢复车辆的速度。
22.可以使用以下关系计算附着力:
[0023][0024]
其中:
[0025]
μ为车轮-轨道附着力;
[0026]fbrake
为施加到车轴的制动力;
[0027]
r为车轮半径;
[0028]
j为车轴的惯性;
[0029]
为车轴的角加速度;
[0030]
m为车轴上的重量;
[0031]
g为重力加速度。
[0032]
如图1所示,数据库5可以设置在轨道车辆上,或者如图2所示,数据库5可以相对于轨道车辆远程布置。如果数据库5为远程布置,则系统将能够通过适当的无线通信与数据库通信。
[0033]
该系统还包括控制单元7,该控制单元7配置为根据当前获取的光学信息与先前存储在数据库5中的光学信息之间的比较,确定当前车轮-轨道附着力值。
[0034]
有利地,根据当前确定的车轮-轨道附着力值,可以通过布置在驾驶室内的合适的人机界面向操作者提供建议。替代地或者附加地,根据当前确定的车轮-轨道附着力值,可以自动控制轨道车辆的制动系统和/或轨道车辆的wsp系统,和/或轨道车辆的加速度水平。
[0035]
控制单元7例如可以是plc、微处理器、微控制器或fpga。
[0036]
如图所示,光学信息获取装置3可以布置在轨道车辆中,以根据轨道车辆的行进方向v,获取位于轨道车辆的第一车轴a1前方的轨道的光学信息。
[0037]
以此方式,获得的光学信息不受轨道车辆的车轮通过轨道的干扰,这将有利于清洁轨道或在任何情况下修改轨道的状态。
[0038]
控制单元7配置为:确定与光学信息获取装置3获取的当前光学信息相关联的当前车轮-轨道附着力值对应于存储在数据库5中的、且与当前光学信息具有更高相似度的光学信息相关联的附着力值。
[0039]
显然,可以由控制单元7通过深度学习算法来确定相似度。
[0040]“深度学习”是指基于不同表现层次的机器学习和人工智能的研究领域。深度学习是基于组织在不同层中的人工神经网络的一组技术,其中每一层计算后续层的值,使得信息处理地越来越完整。
[0041]
图像识别是计算机科学的一个分支,称为“计算机视觉”。
[0042]
图像识别的算法可以用于定义相似度。在广义上,自动识别图像意味着使用接收输入图像并能够从中提取各种信息的算法。所提取的信息可以分为几个层级:低层级(例如存在各种灰色或彩色阴影,亮度突然变化等的统计);中层级(与图像区域相关的特征和区域之间的关系)、或高层级(对具有语义意义的对象的确定)。即使仅基于低层级或中层级或高层级特征,也可以将两个图像识别为相似的。
[0043]
优选地,光学信息获取装置3为视觉或图像获取传感器,例如摄像机或照相机。
[0044]
或者,光学信息获取装置3可以为基于反射的光学传感器。在这种情况下,基于反
射的光学传感器布置为向轨道发送光信号,并检测从轨道反射的光信号的数量和/或分布,以指示轨道的表面的状况。
[0045]
为了校准该系统,数据库5可以预先存储预定量的已知光学信息,已知光学信息与相应的已知附着力值相关联,已经预先验证其正确性。存储的信息随后将在轨道车辆的正常运行期间得到增强和更新。例如,光学信息获取装置3可以以确定的时间间隔或者在检测到附着情况劣化时获取光学信息。
[0046]
现在列举一个实际的例子,在填充数据库的第一阶段中,通过光学信息获取装置3获取确定量的光学信息,该确定量的光学信息与相应的实际车轮-轨道附着力值相关联,实际的车轮-轨道附着力值为在光学信息获取装置3获取相应光学信息时实际测量的。在第二操作步骤中,光学信息获取装置3将拾取一个或多个光学信息的附加项,通过这些附加项与先前存储在数据库5中的光学信息相比较,来确定当前的车轮-轨道附着力值。特别地,确定对应于当前车轮-轨道附着力值的附着力值,该附着力值与存储在数据库5中的光学信息相关联、且与附加的当前光学信息具有更高的相似度。
[0047]
因此,所实现的优点在于,提供了一种用于确定轨道车辆的车轮-轨道附着力值的系统,由于系统的自校准将累积一系列过去的事件,该系统能够以越来越可靠的方式进行自校准。由于适当校准的系统,基于光学传感器的间接测量的解释将越来越可靠,因此将允许减少或消除仅专用于测量附着力的制动的需要。
[0048]
已经描述了根据本发明的用于确定轨道车辆的车轮-轨道附着力值的系统的各个方面和实施例,应当理解,每个实施例可以与任何其它实施例组合。此外,本发明不限于所描述的实施例,而是可以在所附权利要求限定的范围内变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1