行驶路径生成装置的制作方法
1.本技术涉及行驶路径生成装置。
背景技术:
2.近年来,在车辆中,为了更舒适且安全地进行驾驶员的驾驶,开发并提出了利用自动驾驶技术的各种各样的技术。例如,在专利文献1中,提出了一种车辆控制装置,该车辆控制装置检测根据来自前方识别摄像头的信息而计算出的自主传感器行驶路径、根据包含本车辆周边道路的车道中央点组及白线位置信息等在内的高精度地图信息和gps等gnss(globalnavigation satellite system:全球导航卫星系统)而计算出的俯瞰传感器行驶路径,根据各行驶路径的权重来计算经整合后的行驶路径,从而追踪最佳路径,其中,各行驶路径的权重是基于从所述前方识别摄像头的检测状态所判定的可靠度和从所述gnss接收状态所判定的可靠度来决定的。现有技术文献专利文献
3.专利文献1:日本专利第6055525号公报
技术实现要素:
发明所要解决的技术问题
4.一般来说,路径是用多项式表示的,俯瞰传感器行驶路径、自主传感器行驶路径、整合路径的各式用式(1)~式(3)表示。在各式中,第一项(二次项)的系数表示路径的曲率分量(以下称为曲率分量),第二项 (一次项)的系数表示本车辆和路径的角度分量(以下称为角度分量),第三项(截距项)的系数表示本车辆和路径的横向位置分量(以下称为横向位置分量)。
5.[数学式1]path_sat
(x)
=c2_sat
×
x2+c1_sat
×
x+c0_sat...(1)[数学式2]path_cam
(x)
=c2_cam
×
x2+c1_cam
×
x+c0_cam...(2)[数学式3]path_all
(x)
=c2_all
×
x2+c1_all
×
x+c0_all...(3)
[0006]
另外,整合路径的上述各分量用式(4)~式(6)表示。在各式中, w2_sat、w1_sat、w0_sat是对俯瞰传感器行驶路径各分量的权重,w2_cam、 w1_cam、w0_cam是对自主传感器行驶路径的各分量的权重,通过对多个路径的上述各分量彼此进行加权平均(加权平均)来求出整合路径的各分量。
[0007]
[数学式4]c2_all=w2_sat
×
c2_sat+w2_cam
×
c2_cam...(4)(其中、w2_sat+w2_cam=1)
[数学式5]c1_all=w1_sat
×
c1_sat+w1_cam
×
c1_cam...(5)(其中、w1_sat+w1_cam=1)[数学式6]c0_all=w0_sat
×
c0_sat+w0_cam
×
c0_cam...(6)(其中、w0_sat+w0_cam=1)
[0008]
另外,在各式中,w2_sat:整合路径的曲率分量中的俯瞰传感器行驶路径的权重,w2_cam:整合路径的曲率分量中的自主传感器行驶路径的权重,w1_sat:整合路径的角度分量中的俯瞰传感器行驶路径的权重,w1_cam:整合路径的角度分量中的自主传感器行驶路径的权重,w0_sat:整合路径的横向位置分量中的俯瞰传感器行驶路径的权重,w0_cam:整合路径的横向位置分量中的自主传感器行驶路径的权重。通过对多个路径的所述各成分彼此进行加权平均(加权平均),能够求出整合路径的各分量。
[0009]
在此,在专利文献1中提出的技术中,在隧道入口附近等,假设前方识别摄像头难以识别隧道内部,自主传感器行驶路径的角度分量和曲率分量的精度较低的情况,整合路径的角度分量和曲率分量将俯瞰传感器行驶路径的权重设定得比自主传感器行驶路径的权重要高。然而,实际上,由于gnss的位置及方位误差的影响,俯瞰传感器行驶路径的横向位置分量和角度分量的精度比自主传感器行驶路径要低,因此对于整合路径的角度分量,存在即使用将俯瞰传感器行驶路径的权重设定得较高的现有的加权也不能生成最佳的整合路径的问题。
[0010]
本技术的目的在于生成与现有的路径生成装置相比精度较高的路径,以根据本车辆所放置的状态进行最佳的控制。用于解决技术问题的技术手段
[0011]
本技术的行驶路径生成装置的特征在于,包括:第一路径生成部,该第一路径生成部基于道路地图数据输出由俯瞰曲率分量、本车辆的俯瞰角度分量、所述本车辆的俯瞰横向位置分量构成的俯瞰行驶路径;第二路径生成部,该第二路径生成部基于来自搭载于所述本车辆的传感器的信息输出由自主曲率分量、所述本车辆的自主角度分量、所述本车辆的自主横向位置分量构成的自主行驶路径;以及路径生成部,该路径生成部接收所述第一路径生成部和所述第二路径生成部的输出,基于所述俯瞰曲率分量、所述自主角度分量以及所述自主横向位置分量,设定所述本车辆的行驶路径的曲率分量、相对于所述本车辆的行驶路径的角度分量、相对于所述本车辆的行驶路径的横向位置分量,生成所述本车辆的行驶路径。发明效果
[0012]
本技术的行驶路径生成装置通过使用俯瞰行驶路径及自主行驶路径的曲率分量、角度分量、横向位置分量来表示所生成的行驶路径,从而能够生成比以往高精度的整合路径。
附图说明
[0013]
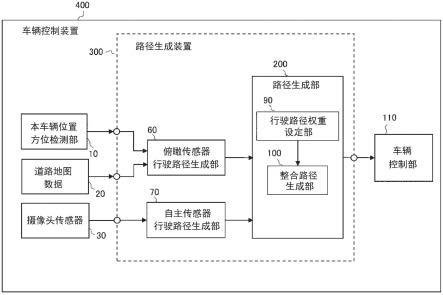
图1是表示实施方式1的车辆控制装置的结构的框图。图2是实施方式1的俯瞰传感器行驶路径生成部的动作的说明图。图3是表示实施方式1的车辆控制装置的动作的流程图。图4是说明实施方式1的俯瞰传感器行驶路径生成部和自主传感器行驶路径生成部的路径的坐标系的图。图5是表示实施方式1的车辆控制装置的其他结构的框图。图6是表示实施方式1的行驶路径权重设定部的其他方式的框图。图7是表示实施方式1的行驶路径权重设定部的其他方式的动作的流程图。图8是表示实施方式1的车辆控制装置的其他结构的框图。图9是表示实施方式1的行驶路径权重设定部的其他方式的框图。图10是表示实施方式1的行驶路径权重设定部的其他方式的动作的流程图。图11是表示实施方式1的车辆控制装置的其他方式的结构的框图。图12是表示实施方式1的行驶路径权重设定部的其他方式的框图。图13是表示实施方式1的行驶路径权重设定部的其他方式的动作的流程图。图14是表示实施方式2的车辆控制装置的结构的框图。图15是表示实施方式2的行驶路径权重设定部的框图。图16是表示实施方式2的行驶路径权重设定部的动作的流程图。图17是实施方式2的俯瞰传感器行驶路径生成部的动作说明图。图18是表示实施方式2的车辆控制装置的其他方式的结构的框图。图19是表示实施方式2的行驶路径权重设定部的其他方式的框图。图20是表示实施方式2的行驶路径权重设定部的其他方式的动作的流程图。图21是表示实施方式1和2的行驶路径生成装置的硬件的一个示例的框图。
具体实施方式
[0014]
实施方式1.以下,基于附图对实施方式1进行说明。另外,在各图中,同一标号分别表示相同或相当的部分。图1是表示实施方式1中的车辆控制装置400的结构的框图。如图1所示,路径生成装置300接收来自本车辆位置方位检测部10、道路地图数据20、摄像头传感器30的信息,输出车辆控制部110的控制中所使用的整合路径的信息。本车辆位置方位检测部10基于gnss的定位信息输出本车辆的绝对坐标和方位。道路地图数据20包含本车辆的周边行驶车道中央的目标点序列信息。摄像头传感器30搭载在车辆上并输出本车辆前方的车道的分割线信息。路径生成装置300包括俯瞰传感器行驶路径生成部(第一行驶路径生成部)60、自主传感器行驶路径生成部(第二行驶路径生成部)70、行驶路径权重设定部90、整合路径生成部100。这里,由行驶路径权重设定部90和整合路径生成部100构成路径生成部200。
[0015]
俯瞰传感器行驶路径生成部60根据本车辆位置方位检测部10、道路地图数据20,输出以本车辆前方的特定区间(设为前方注视距离)为近似范围并由多项式近似本车辆应
行驶的车道而得的结果。即,如图2所示,在本车辆1的行驶中,设定由道路的分割线信息24所限制的本车道22,将本车辆 1的前方的特定区间作为近似范围23,计算包含该近似范围23在内、且基于与目标点序列信息21相对应的多项式而得的近似曲线25。(参照图2)。另外,前方注视距离是根据车速可变的,车速较高时,前方注视距离变长,车速较低时,前方注视距离变短。自主传感器行驶路径生成部70基于摄像头传感器30的前方车道的分割线信息,输出由多项式表示本车辆应行驶的行驶路径而得的结果。作为基于多项式的近似结果,俯瞰传感器行驶路径生成部60、自主传感器行驶路径生成部70计算本车与近似曲线的横向位置偏差、角度偏差、路线曲率的各系数,分别输出俯瞰行驶路线和自主行驶路线。
[0016]
另外,由于俯瞰传感器行驶路径是以道路地图数据为基础的,因此与自主传感器行驶路径相比,具有能够高精度地表示路径曲率的优点。另外,由于自主传感器行驶路径是基于摄像头的拍摄信息,因此与受gnss引起的位置或方位的误差影响的俯瞰传感器行驶路径相比,具有能够高精度地表示本车辆与路径的角度、本车辆与路径的横向位置的优点。另外,“俯瞰”表示从高处往下看的状态,“俯瞰的”表示接近于从高处往下看的状态。与此相对地,“自立型”表示利用摄像头或者声纳等汽车上搭载的各种传感器来识别并对应周围的状态。
[0017]
行驶路径权重设定部90设定成为俯瞰传感器行驶路径生成部60和自主传感器行驶路径生成部70的各行驶路径的准确度的权重。整合路径生成部100根据俯瞰传感器行驶路径生成部60、自主传感器行驶路径生成部70、行驶路径权重设定部90的信息,输出作为单一路径的整合路径。
[0018]
接着,利用图3的流程图说明实施方式1中的车辆控制装置的整体动作。另外,图3的流程图是在车辆行驶中重复执行的流程图。首先,俯瞰传感器行驶路径生成部60根据本车辆位置方位检测部10和道路地图数据20的信息,计算当前本车辆正在行驶的车道的中央点序列和本车辆的状态作为图4 所示的本车辆基准坐标系上的近似式,并表示为式(1)(步骤s100)。接着,自主传感器行驶路径生成部70根据摄像头传感器30的前方车道的分割线信息,与上述相同地,计算本车辆应行驶的行驶路径26作为图4的本车辆基准坐标系上的近似式,并表示为式(2)(步骤s200)。在式(1)、式 (2)中,第一项表示各路径的曲率,第二项表示对于各路径的本车辆的角度,第三项表示对于各路径的本车辆的横向位置。接着,行驶路径权重设定部90设定对于在步骤s100和步骤s200中计算出的各行驶路径的权重,在本实施方式中设定预先确定的值(步骤s400)。
[0019]
在此,对于路径的曲率分量,将俯瞰传感器行驶路径的权重设定得高于自主传感器行驶路径的权重,对于本车辆和路径的角度分量、本车辆和路径的横向位置分量,设定预先确定的值以使自主传感器行驶路径的权重高于俯瞰传感器行驶路径的权重。另外,俯瞰传感器行驶路径的权重和自主传感器行驶路径的权重相加成为1,例如,对于路径的曲率分量,俯瞰传感器行驶路径的权重设定为0.7,自主传感器行驶路径的权重设定为0.3,对于本车辆和路径的角度分量、本车辆和路径的横向位置分量,自主传感器行驶路径的权重设定为0.7,俯瞰传感器行驶路线的权重设定为0.3。或者,对于路径的曲率分量,俯瞰传感器行驶路径的权重可以设定为1,自主传感器行驶路径的权重可以设定为0,对于本车辆和路径的角度分量、本车辆和路径的横向位置分量,自主传感器行驶路径的权重可以设定为1,俯瞰传感器行驶路径的权重可以设定为0。另外,对于路径的曲率分量,俯瞰传感器行驶路径
的权重设定为1,自主传感器行驶路径的权重设定为0,对于本车辆和路径的角度分量、本车辆和路径的横向位置分量,自主传感器行驶路径的权重设定为1,俯瞰传感器行驶路径的权重设定为0时,在此情况下,实质上,俯瞰传感器行驶路径用于路径的曲率分量,自主传感器行驶路径用于本车辆和路径的角度分量、本车辆和路径的横向位置分量。
[0020]
然后,整合路径生成部100根据对在步骤s100和步骤s200计算出的各路径的系数和在步骤s400中设定的各路径的权重,通过式(4)~(6)计算本车辆应当行驶的整合路径(式(3)的系数)。
[0021]
最后,车辆控制部110使用整合路径进行车辆控制(步骤s600)。另外,步骤s100和步骤s200的各路径的计算动作中,一个路径的计算结果不影响另一个路径的计算动作,因此对于计算的顺序没有限制。
[0022]
这样,在本实施方式的路径生成装置中,在对多条路径的分量彼此进行加权平均时,对于路径的曲率分量,使俯瞰传感器行驶路径的权重比自主传感器行驶路径的权重要高,对于本车辆和路径的角度分量、本车辆和路径的横向位置分量,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高,因此能够生成比以往精度更高的整合路径。
[0023]
另外,在本实施方式中,通常,对于路线的曲率分量,使俯瞰传感器行驶路径的权重比自主传感器行驶路径的权重要高,对于角度分量和横向位置分量,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高,但是,仅在自主传感器行驶路径的曲率的精度变低的状况下,进行上述加权,在除此以外的状况下,与以往相同地,基于从前方识别摄像头的检测状态所判定的可靠度、和从gnss接收状态所判定的可靠度来设定权重即可。此时,例如车辆控制装置设为图5的结构,行驶路径权重设定部90设为图6并具备隧道入口行驶判定部91,能够根据本车辆位置和道路地图数据判定是否在隧道附近,在步骤s400中,行驶路径权重设定部基于图7的流程图,判定本车辆到隧道的距离de是否比设定的阈值d1要短(本车辆是否在隧道的入口附近行驶),仅在判定为在隧道的入口附近行驶的情况下,对于路径的曲率分量,使俯瞰传感器行驶路径的权重比自主传感器行驶路径的权重要高,对于角度分量和横向位置分量,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高即可。
[0024]
或者,如图8所示,车辆控制装置400构造为将前方雷达40的检测结果和摄像头传感器30的检测结果输出到行驶路径权重设定部90,并且,行驶路径权重设定部90如图9所示具备本车辆附近行驶判定部92,其判定前面的车辆是否在距本车辆预先确定的距离内正在行驶,能够判定前车是否在距所述本车辆预先确定的距离内行驶,在步骤s400中,行驶路径权重设定部 90基于图10的流程图,判定从本车辆到前车的距离df是否比设定的阈值d2 要短(即,前车在距所述本车辆预先确定的距离内行驶),仅在判定为短的情况下,对于路径的曲率分量,使俯瞰传感器行驶路径的权重比自主传感器行驶路径的权重要高,对于角度分量和横向位置分量,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高。
[0025]
或者,车辆控制装置400为图11所示的结构,并且行驶路径权重设定部 90如图12所示具备自主传感器行驶路径有效距离判定部93,其能够从摄像头判定前方车道的分割线信息的有效距离(即自主传感器行驶路径的有效距离)是否较短,在步骤s400中,行驶路径权重设定部90根据图13的流程图,判定自主传感器行驶路径的有效距离dr是否比设定的阈值d3要短,仅在判定为短的情况下,对于路径的曲率分量,使俯瞰传感器行驶路径的权重比
自主传感器行驶路径的权重要高,对于角度分量和横向位置分量,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高即可。
[0026]
实施方式2.以下,基于附图对实施方式2进行说明。图14是表示实施方式2中的车辆控制装置400的结构的框图。在本实施方式中,相对于实施方式1,追加车速传感器80,将车速传感器80的输出输入到行驶路径权重设定部90。车速传感器80输出本车辆的车速,行驶路径权重设定部90如图15所示具备车速判定部94。
[0027]
接着,对本实施方式中的车辆控制装置400的整体动作进行说明,但整体的流程图与实施方式1相同。但是,步骤s400中的权重的设定方法与实施方式1不同。在本实施方式中,在步骤s400中,行驶路径权重设定部90根据图16的流程图进行权重的设定。以下将基于图16进行说明。
[0028]
首先,判定从车辆传感器50输入的车速v是否低于设定的阈值v1(步骤s401)。在步骤s401中判定为本车辆的车速较低的情况下,在曲率分量、角度分量和横向位置分量的全部中,使自主传感器行驶路径的权重比俯瞰传感器行驶路线的权重要高(步骤s402)。另外,在步骤s401中没有判定为本车辆的车速较低的情况下,对于曲率分量,将俯瞰传感器行驶路径的权重设定为比自主传感器行驶路径的权重要高,对于角度分量和横向位置分量,将自主传感器行驶路径的权重设定为比俯瞰传感器行驶路径的权重要高(步骤s403)。
[0029]
图17是关于本实施方式中的俯瞰传感器行驶路径生成部60的动作,以道路地图数据的点序列信息设为相同条件来比较本车辆的车速较高时和较低时的各输出结果的图。图17中,1为本车辆。21为车辆行驶车道的目标点序列信息,包含在道路地图数据20中。101是俯瞰传感器行驶路径,是由俯瞰传感器行驶路径生成部60计算出的行驶路径。俯瞰传感器行驶路径101是根据从本车辆位置方位检测部10输出的本车辆1的绝对坐标和绝对方位、以及本车辆行驶车道的目标点续列信息21,用近似曲线表示目标路径相对于本车辆1的关系而得的行驶路径。在此,本车辆1的车速越低,则前方注视距离越短,近似范围也越窄,因此,用于计算近似曲线的本车辆行驶车道的目标点序列数较少,容易形成弯弯曲曲的行驶路径。
[0030]
这样,在本实施方式中,在本车辆的车速较低的情况下,在曲率分量、角度分量和横向位置分量的全部中,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高,因此不受上述问题的影响,在车速较低的情况下,能够生成比实施方式1精度更高的整合路径。
[0031]
另外,在本实施方式中,在本车辆的车速较低的情况下,在曲率分量、角度分量和横向位置分量的全部中,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高,但只要直接判定在俯瞰传感器行驶路径生成部60下的用于计算近似曲线的本车辆行驶车道的目标点序列数是否少即可。此时,例如将车辆控制装置400设为图18所示的结构,并且行驶路径权重设定部90作为图19具备点序列数判定部95,能够判定俯瞰传感器行驶路径生成部60下的用于计算近似曲线的本车辆行驶车道的目标点序列数是否少,在步骤s400中,行驶路径权重设定部基于图20的流程图,判定点序列数n是否比设定的阈值n1要少,在判定为少的情况下,在曲率分量、角度分量和横向位置分量的全部中,使自主传感器行驶路径的权重比俯瞰传感器行驶路径的权重要高即可。
[0032]
另外,在实施方式1及实施方式2中,如式(1)~(6)那样,用由路径的曲率分量、本车辆和路径的角度分量、本车辆与路径的横向位置分量构成的二次式来表现由俯瞰传感器行驶路径生成部60计算出的俯瞰传感器行驶路径、由自主传感器行驶路径生成部70计算出的自主传感器行驶路径、以及整合路径,但也未必限定于上述结构。例如,利用将路径的曲率变化分量作为第三项包含在内的三次式来表现(式(7)~(10)),对于路径的曲率变化分量,通过设定与路径的曲率分量相同的权重,从而能够获得与利用二次式来表现所述各行进路径时同等的效果。这里,关于c2_all、c1_all和 c0_all,由于其与式(4)~(6)相同,所以省略其记载。
[0033]
[数学式7] path_sat
(x)
=c3_sat
×
x3+c2_sat
×
x2+c1_sat
×
x+c0_sat ...(7)[数学式8]path_cam
(x)
=c3_cam
×
x3+c2_cam
×
x2+c1_cam
×
x+c0_cam ...(8)[数学式9]path_all
(x)
=c3_all
×
x3+c2_all
×
x2+c1_all
×
x+c0_all ...(9)[数学式10]c3_all=w3_sat
×
c3_sat+w3_cam
×
c3_cam...(10)(其中、w3_sat+w3_cam=1)
[0034]
另外,如图21所示,行驶路径生成装置300是硬件的一个示例,由处理器500和存储装置501构成。虽然未图示存储装置的内容,但具备随机存取储存器等易失性存储装置、和闪存等非易失性的辅助存储装置。此外,也可以具备硬盘这样的辅助存储装置以代替闪存。处理器500执行从存储装置 501输入的程序。该情况下,将程序从辅助存储装置经由易失性存储装置输入到处理器500。另外,处理器500可以将运算结果等数据输出至存储装置 501的易失性存储装置,也可以经由易失性存储装置将数据保存至辅助存储装置。
[0035]
本技术记载了例示性的实施方式,但实施方式所记载的各种特征、方式及功能并不限于特定的实施方式的适用,能单独或以各种组合适用于实施方式。因此,可以认为未例示的无数变形例也包含在本技术说明书所公开的技术范围内。例如,设为包含有对至少一个结构要素进行变形的情况、追加的情况或省略的情况。标号说明
[0036]
1 本车辆10 本车辆位置方位检测部20 道路地图数据21 目标点序列信息22 本车道23 近似范围24 分割线信息25 近似曲线26 行驶路径30 摄像头传感器40 前方雷达50 车辆传感器
60 俯瞰传感器行驶路径生成部70 自主传感器行驶路径生成部80 车速传感器90 行驶路径权重设定部91 隧道入口行驶判定部92 本车辆附近行驶判定部93 自主传感器行驶路径有效距离判定部94 车速判定部95 点序列数判定部100 整合路径生成部101 俯瞰传感器行驶路径110 车辆控制部200 路径生成部300 路径生成装置400 车辆控制装置500 处理器501 存储装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1