电子围栏控制方法、系统、车辆及存储介质与流程
1.本发明属于汽车l3自动驾驶技术领域,具体涉及一种电子围栏控制方法、系统、车辆及存储介质。
背景技术:
2.如专利文献cn 201811604264.2公开的一种自动驾驶电子围栏更新方法、系统、设备及存储介质,该方法包括:一车辆检测到一区域的可行驶状态变更时,在本地区域地图上标注该区域的围栏状态;该车辆将围栏状态变更通知发送至预设范围内的其他车辆;其他车辆接收到该车辆发送的围栏状态变更通知后,对该信息进行置信度分析,通过后在本地区域地图上标注该区域的围栏状态,同时将信息链分发给周围车辆。通过采用本发明的方案,提供了一种基于车车通信的分布式自动驾驶电子围栏更新的方案,不再依赖中心节点,从而降低或去除中心节点更新的通信带宽,保证电子围栏在自动驾驶车辆行驶区域内实时更新;增强了电子围栏及可行驶区域服务的实时可靠性,提高自动驾驶车辆的导航性能。但此方法存在以下问题:需要预存本地地图图层,并在地图上标注区域,以此来判断当前定位在地图中的位置,对控制器资源消耗大。
3.又如cn201910924799.6公开的一种基于交通流的自动驾驶功能推送方法、系统及车辆,该方法采用高精地图定位模块将传感模块实时采集的信息和导航地图模块发送的信息进行计算处理,得到高精度定位信息、交通流信息并输出给环境认知模块,将电子围栏信息输出给推送决策模块,环境认知模块根据接收的信息与传感模块采集的信息进行融合、计算得到交通拥堵距离本车的距离,并发送给推送决策模块,推送决策模块根据其他模块输出的信息进行综合计算及判断,在满足自动驾驶功能开启时,将可通知用户启用自动驾驶功能发送给信息推送模块,信息推送模块接收到此信息后控制显示模块和声音输出模块进行提示。本方法能够在预测到交通拥堵的复杂工况下自动通知用户可启用自动驾驶功能。但存在的问题是:该方法通过使用高精度地图来预存电子围栏信息,高精度地图成本高,而且由于电子围栏信息是预存的,所以更新缓慢,强依赖于地图厂商。而且该功能仅局限于交通拥堵路况,适用场景太少。
4.因此,有必要开发一种新的电子围栏控制方法、系统、车辆及存储介质。
技术实现要素:
5.为了解决以上技术问题,本发明提供一种电子围栏控制方法、系统、车辆及存储介质。
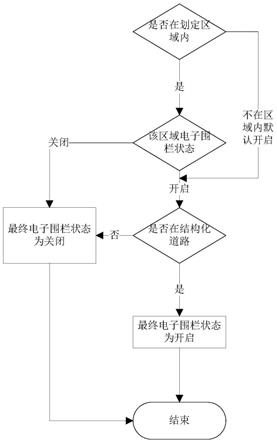
6.第一方面,本发明所述的一种电子围栏控制方法,包括以下步骤:步骤1、判断车辆是否在划定区域内:将地图划分为若干个大区域,配置并存储大区域的区域配置文件,所述区域配置文件包括大区域的属性,以及该大区域内所有划定区域的属性,所述属性包括区域边界点坐标、坐标系类型、区域属性和区域名称;其中,所述划定区域为不适合开启自动驾驶功能
的路段;首先根据车辆当前定位位置确定车辆当前所处的大区域,并将该大区域的区域配置文件中的所有信息加载到内存中,且只要车辆不出该大区域,或者区域配置文件没有更新,就不需要重复读取区域配置文件;读取区域配置文件,并判断车辆是否处于划定区域;若当前车辆处于划定区域内,则判断该区域的电子围栏状态是否开启,若电子围栏状态为开启,则进入步骤2,若电子围栏状态为关闭,则结束流程;若当前车辆不在划定区域内,则默认该区域的电子围栏状态为开启,并进入步骤2;步骤2、判断车辆是否在结构化道路上:若车辆在结构化道路上,则最终电子位置状态为开启,若车辆不在结构化道路上,则最终电子围栏状态为关闭。
7.进一步,判断车辆是否处于划定区域,具体为;将车辆位置看作一个点,将划定区域的边界点连成一个多边形,判断点是否在多边形内,若点在多边形内,则表示该车辆处于该多边形所对应的划定区域内,反之,表示该车辆未处于该多边形所对应的划定区域内。
8.进一步,采取射线法判断一个点是否在多边形内,首先由该点引出一条平行于x轴或y轴的射线,计算该射线与边界点连接成的多边形有几个交点,若有奇数个交点,则表示该点在多边形的内部,若有偶数个交点,则表示该点在多边形的外部。
9.进一步,计算交点个数分为以下3种情况:(1)相邻两个边界点连成一条线段,两个边界点都在定位点右侧,并且在定位点引出的射线上下两侧,则该射线与该线段有一个交点;两个边界点在定位点的左右两侧,并且在定位点引出的射线上下两侧,计算定位点与线段下端点连线的斜率,如果该斜率大于线段的斜率,则该射线与该线段有一个交点,否则没有交点;(2)射线通过多边形的顶点,且射线不与边重合:(a)若多边形上位于射线通过的顶点的相邻两个点在射线异侧,则该射线与该线段有一个交点,若多边形上位于射线通过的顶点的相邻两个点在射线同侧,则该射线与该线段没有交点;(b)射线通过多边形的顶点,且射线与边重合,则把重合部分的两个点看成一个点,再用方法(a)判断。
10.(3)如果定位点在多边形的边或者顶点上,则认为定位点在多边形区域内。
11.进一步,判断车辆是否在结构化道路上,具体为:根据adas地图数据判断是否在高速和快速路上,若adas地图数据输出的道路类型为高速和快速路,则认为车辆行驶在结构化道路上,若道路类型不为高速和快速路,则再根据前视摄像头识别的车道线来判断车道线质量,如果车道线质量到达预设质量,则认为车辆当前行驶在结构化道路上,若车道线质量未到达预设质量,则认为车辆当前未行驶在结构化道路上。
12.进一步,如果当adas地图输出的道路类型发送跳变时,根据历史记录的道路类型和前方道路类型对其进行滤波处理;当车辆进出匝道且道路类型无法及时响应时,根据前视摄像头所识别的车道线曲率与adas地图输出的道路曲率计算得到车道线曲率,如果车道线曲率大于预设曲率阈值,
且匝道信息为匝道入口或者出口,则认为车辆进入了匝道。
13.进一步,判断车道线质量的方法为判断车道线的各个系数的稳定性,通过计算各个系数在预设数量帧检测窗的均方差值,若均方差值小于预设值,则认为车道线的质量好,若均方差值大于等于预设值,则认为车道线的质量不好。
14.第二方面,本发明所述的一种电子围栏控制系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述控制器调用所述计算机可读程序时,能执行如本发明所述的所述电子围栏控制方法的步骤。
15.第三方面,本发明所述的一种车辆,采用如本发明所述的电子围栏控制系统。
16.第四方面,本发明所述的一种存储介质,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述控制器调用计算机可读程序时能执行如本发明所述的电子围栏控制方法的步骤。
17.本发明具有以下优点:不需要本地预存地图信息,仅仅需要区域的坐标点,大大节省了成本和内存开销。使用adas地图成本低,而且区域配置信息不依赖于地图厂商,可以自行定义更新周期,没有使用场景限制。
附图说明
18.图1是本实施例的整体框架流程图;图2是本实施例中判定围栏区域流程图;图3是本实施例中判断定位点是否在多边形区域内流程图;图4是本实施例中判断结构化道路流程图。
具体实施方式
19.下面结合附图对本发明作进一步说明。
20.如图1至图4所示,一种电子围栏控制方法,用于l3级自动驾驶技术中规定什么区域可以开启自动驾驶功能,什么区域不能开启自动驾驶功能。其方法包括以下步骤:步骤1、判断车辆是否在划定区域内:首先,功能定义或者测试发现某些道路不适合开启功能(即不在电子围栏内),但传统方法无法判断。如果能够在地图上把该区域预先标记出来,并保存一个文件,作为一个划定区域,当车辆行驶至该区域时,就可以根据预存的划定区域,提醒车辆已经行驶到该区域了,以便做下一步的判断。
21.本实施例中,为了能够准确判地断车辆出是否在划定区域内,需要采用以下方法:将地图划分为若干个大区域,配置并存储大区域的区域配置文件,所述区域配置文件包括大区域的属性,以及该大区域内所有划定区域的属性,所述属性包括区域边界点坐标(经纬度)、坐标系类型、区域属性(电子围栏开启和关闭)和区域名称;其中,所述划定区域为不适合开启自动驾驶功能的路段。
22.首先根据车辆当前定位位置确定车辆当前所处的大区域,并将该大区域的区域配置文件中的所有信息加载到内存中,且只要车辆不出该大区域,或者区域配置文件没有更新,就不需要重复读取区域配置文件。
23.以下以大区域为省市为例进行说明,比如:中国共有34个省级行政单位,所以会预
存34个省级行政单位的区域配置文件。程序首先会读取所有省级行政单位的区域配置文件中第一个大区域信息,即该省市边界。判断车辆当前定位位置在哪个省级区域内。如当前定位位置在重庆,则程序只需要把重庆对应区域配置文件中的所有信息加载到内存中,只要车辆不出重庆,或者区域配置文件没有更新,程序就不需要重复读取配置文件。
24.读取区域配置文件后,下一步判断车辆是否处于划定区域内。
25.本实施例中,判断车辆是否处于划定区域,具体为:将车辆位置看作一个点,将划定区域的边界点连成一个多边形,判断点是否在多边形内,若点在多边形内,则表示该车辆处于该多边形所对应的划定区域内,反之,表示车辆未处于该多边形所对应的划定区域内。
26.本实施例中,判断一个点是否在一个多边形内的方法如下:采取射线法判断一个点是否在多边形内,首先由该点引出一条平行于x轴或y轴的射线,计算该射线与边界点连接成的多边形有几个交点,若有奇数个交点,则表示该点在多边形的内部,若有偶数个交点,则表示该点在多边形的外部。
27.如图3所示,本实施例中,计算交点个数分为以下3种情况:(1)相邻两个边界点连成一条线段,两个边界点都在定位点右侧,并且在定位点引出的射线上下两侧,则该射线与该线段有一个交点;两个边界点在定位点的左右两侧,并且在定位点引出的射线上下两侧,计算定位点与线段下端点连线的斜率,如果该斜率大于线段的斜率,则该射线与该线段有一个交点,否则没有交点。
28.(2)射线通过多边形的顶点,且射线不与边重合:(a)若多边形上位于射线通过的顶点的相邻两个点在射线异侧,则该射线与该线段有一个交点,若多边形上位于射线通过的顶点的相邻两个点在射线同侧,则该射线与该线段没有交点。
29.(b)射线通过多边形的顶点,且射线与边重合,则把重合部分的两个点看成一个点,再用方法(a)判断。
30.(3)如果定位点在多边形的边或者顶点上,则认为定位点在多边形区域内。
31.若当前车辆处于划定区域内,则判断该区域的电子围栏状态是否开启,若电子围栏状态为开启,则进入步骤2,若电子围栏状态为关闭,则结束流程;若当前车辆不在划定区域内,则默认该区域的电子围栏状态为开启,并进入步骤2。
32.步骤2、判断车辆是否在结构化道路上:若车辆在结构化道路上,则最终电子位置状态为开启,若车辆不在结构化道路上,则最终电子围栏状态为关闭。
33.本实施例中,判断车辆是否在结构化道路上,具体为:根据adas地图数据判断是否在高速和快速路上,若adas地图数据输出的道路类型为高速和快速路,则认为车辆行驶在结构化道路上,若道路类型不为高速和快速路,则再根据前视摄像头识别的车道线来判断车道线质量,如果车道线质量到达预设质量,则认为车辆当前行驶在结构化道路上,若车道线质量未到达预设质量,则认为车辆当前未行驶在结构化道路上。
34.本实施例中,根据adas地图数据判断是否在高速和快速路上。adas地图会提供给道路类型信号,一般的道路类型有城市快速路、省道、县道、国道、高速路、次要道路、普通道路、乡公路、县乡内部路等。由于adas地图本身的精度以及定位误差的问题,往往得到的道路类型并不是正确的,这时需要对其进行判断。地图信息依赖于定位的锁路算法,一般adas
地图定位误差横向在10米以上,在一些平行路或者高架桥上,往往定位算法会把车辆判定在另一条路上,此时车辆收到的道路类型信号就是错的。此时,需要对道路类型进行跟踪,对于道路类型的跳变,根据历史记录的类型和前方道路类型对其进行滤波。比如:adas地图前一帧输出的道路类型为a,当前帧输出的道路类型为b,且下一帧输出的道路类型a,此时认为道路类型发生了跳变,将b过滤掉。如果adas地图前一帧输出的道路类型为a,当前帧输出的道路类型为b,且连续有10帧输出的道路类型均为b,则认为车辆行驶的道路类型已由a切换到b了。
35.由于纵向定位误差,导致我们在进出匝道的时候道路类型无法及时响应,此时通过计算车道线的曲率(通过前视摄像头识别的车道线来计算)并结合adas地图曲率(以前视摄像头和adas地图的置信度的高低来决定,比如:当前视摄像头识别不到车道线时,此时以adas地图输出的曲率为准;如果前视摄像头识别到车道线的置信度高,则以前视摄像头识别的车道线的曲率为准),如果车道线的曲率大于预设曲率阈值,并且匝道信息为匝道入口或者出口,此时认为车辆进入了匝道。
36.如图4所示,本实施例中,车道线具体形式是三阶曲线方程,判断车道线质量的方法为判断车道线的各个系数的稳定性,通过计算各个系数在预设数量帧(一般为10帧)检测窗的均方差值,若均方差值小于预设值,则认为车道线的质量好,若均方差值大于等于预设值,则认为车道线的质量不好。
37.本方法使用低成本的adas地图,且不增加新的图层,可以人为的划定地图区域把其坐标点预存为配置文件,并设置电子围栏属性,从而能够根据需要在该区域开启和关闭l3级功能。
38.本实施例中,一种电子围栏控制系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述控制器调用所述计算机可读程序时,能执行如本实施例中所述的所述电子围栏控制方法的步骤。
39.本实施例中,一种车辆,采用如本实施例中所述的电子围栏控制系统。
40.本实施例中,一种存储介质,包括存储器和控制器,所述存储器内存储有计算机可读程序,控制器调用计算机可读程序时能执行如本实施例中所述的电子围栏控制方法的步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1