一种电动汽车横向稳定性预测方法
1.本发明涉及一种电动汽车横向稳定性分析方法,属于汽车动力学技术领域。
背景技术:
2.现阶段,对于电动汽车横向稳定性分析的研究还不深入,一般仅仅分析电动汽车制动工况等单一工况的横向稳定性,尤其对于融合多种不确定因素的多种运行工况的电动汽车横向稳定性预测研究更少。因此本发明以汽车动力学理论为基础,建立基于汽车制动系统、转向系统、悬架系统、动力电池系统、车身系统的最优电动汽车模型,分析研究基于不确定因素影响的多种运行工况下的电动汽车横向稳定性预测,以提高电动汽车的运行安全。
技术实现要素:
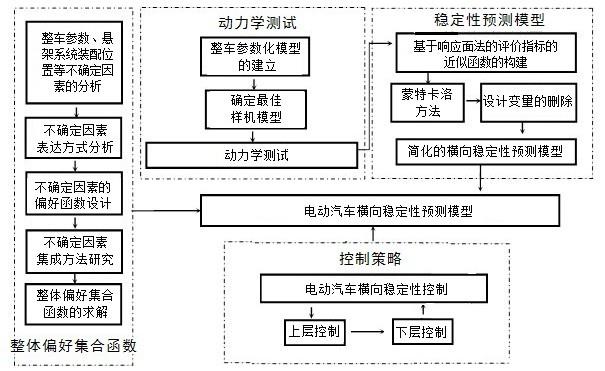
3.针对现有技术的不足,本发明可以解决的问题是提出一种电动汽车横向稳定性预测方法,首先建立电动汽车的整车参数化模型;通过具有相同子模块但不同装配位置的电动汽车样机模型的动力学仿真对比得到最佳的电动汽车样机模型;以此最佳样机模型为平台,综合分析电动汽车在多种工况下的动力学特征;基于电动汽车动力学特性的测试数值,应用响应面法建立多种运行工况的电动汽车横向稳定性预测模型;分析电动汽车动力电池的结构尺寸参数、装配定位参数等不确定性因素变异的相关性对电动汽车横向稳定性预测模型的干扰,删除不重要的影响因素,简化电动汽车横向稳定性预测模型;应用偏好函数方法将多种不确定因素集成到简化的电动汽车横向稳定性预测模型中;联合电动汽车制动系统中的电机子系统与液压子系统,构建基于横摆力矩分配策略的电动汽车横向稳定性控制策略,提高多种运行工况下的电动汽车的横向稳定性。
4.本发明解决技术问题所采用的技术方案是:一种电动汽车横向稳定性预测方法,包括以下步骤:第一步,整车参数化样机模型的构建,定义电动汽车整车基本参数、电动汽车底盘子模块的装配位置参数、电动汽车运行参数的初始值和定义域,包括:整车的轴距、轮距、转向梯形底角、动力电池的结构尺寸参数、悬架系统的装配位置、动力电池的装配位置、车辆载荷,建立包括悬架系统、转向系统、制动系统、动力电池系统、车身系统的电动汽车整车参数化样机模型;第二步,确定电动汽车最佳样机模型,以电动汽车整车参数化样机模型为基础,构建出具有相同子模块但不同结构尺寸、不同装配位置的电动汽车样机模型,在相同的车辆载荷、车速,不同的路面附着系数下对比分析电动汽车样机模型在制动工况下的动力学特性,从而对比得出电动汽车最佳样机模型;第三步,动力学测试,基于汽车动力学理论,利用电动汽车最佳样机模型,综合分析不同路面附着系数下的电动汽车在转向工况下的动力学特征,并测试电动汽车横向稳定性的动力学特征评价指标值,包括:车身横摆角速度、车轮横向载荷转移率、质心侧偏角;
第四步,电动汽车横向稳定性预测模型构建,基于电动汽车横向稳定性的动力学特征评价指标测试值,以整车参数化样机模型的参数化变量为基准,应用响应面法建立评价指标的近似函数,包括车身横摆角速度、车轮横向载荷转移率、质心侧偏角,并集成各个评价指标的近似函数构建电动汽车横向稳定性预测模型,每个评价指标采用权重比方式确定权重系数值;第五步,简化电动汽车横向稳定性预测模型,分析研究动力电池的结构尺寸参数及其装配位置参数,悬架系统的装配位置对电动汽车横向稳定性的影响,这些参数的变异与电动汽车横向稳定性的相互关联,并应用蒙特卡洛方法得到主影响因素和次影响因素,删除次影响因素,简化电动汽车横向稳定性预测模型;第六步,建立电动汽车横向稳定性预测模型的整体偏好集合函数,由可控变量、环境噪声变量和评价指标变量组成,这些变量通过个体偏好函数表达,并将可控变量的个体偏好函数、环境噪声变量的个体偏好函数、评价指标的个体偏好函数集成到整体偏好集合函数中,求出稳健的电动汽车横向稳定性预测结果;第七步,电动汽车横向稳定性控制策略研究,基于整体偏好集合函数的预测结果,联合电动汽车制动系统的电机子系统与液压子系统,对车身的附加横摆力矩进行优化分配。
5.本发明的优点是:减小电动汽车动力电池的结构尺寸、装配位置等参数及其变异对多种运行工况的电动汽车横向稳定性的影响,提高不同路面附着系数下多种运行工况的电动汽车横向稳定性预测的稳健性能。
附图说明
6.图1是本发明的技术路线示意图。
具体实施方式
7.下面结合附图说明本发明的最佳实施方式。
8.1. 电动汽车动力学特性分析(1)建立整车参数化样机模型首先定义电动汽车整车基本参数的初始值和定义域,包括整车的轴距、轮距、转向梯形底角、动力电池的结构尺寸参数等参数,再次定义电动汽车底盘的装配位置参数,包括悬架系统、动力电池的装配位置等参数的初始值和定义域,然后定义电动汽车的运行参数,包括车辆载荷的初始值和定义域等,建立包括悬架系统、转向系统、制动系统、动力电池系统、车身系统的电动汽车整车参数化模型。例如,悬架系统、动力电池的装配位置参数,包括悬架系统、动力电池与汽车前轴中心的横向、纵向和垂向距离,定义其初始值和定义域。
9.(2)确定电动汽车最佳样机模型以电动汽车整车参数化模型为基础,构建出具有相同子模块但不同结构尺寸、不同装配位置的电动汽车样机模型;在相同的车辆载荷、车速,不同的路面附着系数下对比分析电动汽车样机模型在制动工况下的动力学特性,从而对比得到电动汽车最佳样机模型。电动汽车的子模块构成划分如下:序号子模块名称子模块代号结构类型
1制动系统brakesystem电机子系统与液压子系统2悬架系统suspension麦弗逊悬架系统3转向系统steersystem多连杆转向机构4动力电池系统batter动力电池模块5车身系统body车身模块(3)动力学测试基于汽车动力学理论,利用电动汽车最佳样机模型,采用鱼钩和双移线等仿真环境,分析不同路面附着系数:结冰路面(0.18)、雪天路面(0.28)、雨天路面(0.4)、干燥路面(0.75)、分离路面下的电动汽车在转向工况的动力学特征,并测试电动汽车横向稳定性的动力学特征评价指标值,包括:车身横摆角速度、车轮横向载荷转移率、质心侧偏角。
10.2. 电动汽车横向稳定性预测模型的构建(1)基于响应面法的评价指标构建综合考虑电动汽车在转向工况下的动力学特征,基于电动汽车横向稳定性的动力学特征评价指标测试值,以整车参数化样机模型的参数化变量为基准,应用响应面法建立评价指标的近似函数,包括车身横摆角速度、车轮横向载荷转移率、质心侧偏角,并集成各个评价指标的近似函数构建电动汽车横向稳定性预测模型,每个评价指标采用权重比方式确定权重系数值。
11.应用汽车动力学理论,通过方向盘转角和方向盘转速等信息判断驾驶员的操纵意图,并通过横摆角速度传感器、纵向加速度传感器、侧向加速度传感器、倾角传感器、车速传感器等信息判断车辆的当前状态;基于电动汽车动力学特性的测试数值,应用响应面方法,建立各个评价指标的近似函数j1、j2、j3,从而构成电动汽车横向稳定性预测模型,如下。
12.为权重系数。
13.其中,ω1、ω2、ω3为不同评价指标的权重系数,j1为车身横摆角速度,代表摆头、甩尾危险性;j2为车轮横向载荷转移率,代表侧翻危险性;j3为质心侧偏角,代表操纵稳定性。
14.各个评价指标代表不同用户群体的偏好,因此权重系数值采用权重比方式确定。权重比方式就是采用配对比较的方法,两两比较评价指标之间的重要性,并依据重要程度设计配对比较矩阵。例如,有n个目标k1,k2,
…
,k
n
的多目标优化问题,对这n个目标存在一组重要性的权重比,分别为r1,r2,
…
,r
n
,两两比较出各优化目标的重要性比值,建立矩阵k,将k乘以一个权重比构成的向量α=,如下式矩阵k最大特征值所对应的特征向量即为电动汽车横向稳定性预测模型中各个评价指标的权重系数值。
15.(2)简化电动汽车横向稳定性预测模型分析研究动力电池的结构尺寸参数及其装配位置参数,悬架系统的装配位置参数对电动汽车横向稳定性的影响,这些参数的变异与电动汽车横向稳定性的相互关联。应用蒙特卡洛方法分析这些参数对电动汽车横向稳定性的影响,得到主影响因素和次影响因素,删除预测模型中次影响因素,简化电动汽车横向稳定性预测模型。
16.3. 建立整体偏好集合函数建立电动汽车横向稳定性预测模型的整体偏好集合函数,由可控变量、环境噪声变量和评价指标变量组成,这些变量通过个体偏好函数表达,并将可控变量的个体偏好函数、环境噪声变量的个体偏好函数、评价指标的个体偏好函数集成到整体偏好集合函数中,求出稳健的电动汽车横向稳定性预测结果。
17.可控变量,即整车基本参数,如整车的轴距、轮距、转向梯形底角等,记作x=[x1,x2,x3,
…
];环境噪声变量为汽车底盘各子模块的装配位置参数等,如悬架系统的装配位置参数,记作z=[z1,z2,z3,
…
];评价指标变量为应用响应面方法建立的近似函数j1、j2、j3,记作f(x,z)=[f1(x,z),f2(x,z), f3(x,z)]。
[0018]
通过个体偏好函数表达整体偏好集合函数的相关变量,个体偏好函数的值域可以参考汽车性能定义,也可以按照设计者或者用户的偏好定义。
[0019]
对于按照设计者或者用户的偏好定义,将个体偏好函数的值域定义在[0,1]范围内。值为1表示性能最好,值为0表示性能最差。例如,动力电池的结构尺寸,设计者认为厚度为240mm最好,其个体偏好值就定义为1,以满足设计者的偏好。
[0020]
对于以汽车性能为基础的个体偏好函数的值域定义可以采用如下方法:例如,对于可控变量:转向梯形底角x1,按照转向机构最小传动角的约束和安装空间的约束,其定义域为x1=[65,75]
°
;根据仿真测试结果,转向梯形底角的最佳结果为x1=71
°
,因此其个体偏好确定为1,其余定义域内设计点的偏好用一次函数确定,也可以使用其他函数确定。转向梯形底角x1的个体偏好函数a1定义如下:应用整体偏好集合函数q集成个体偏好函数,如下:式中,p1、p2、p3分别是可控变量的个体偏好函数、环境噪声变量的个体偏好函数、评价指标的个体偏好函数;ω
p1
,ω
p2
,ω
p3
是权重系数。
[0021]
稳健的整体偏好集合函数q的预测结果f用下式求解式中,μ为整体偏好集合函数q的均值,σ为整体偏好集合函数q的方差,ω为权重系数。
[0022]
4.电动汽车横向稳定性控制策略研究
基于整体偏好集合函数q的预测结果,联合电动汽车制动系统的电机子系统与液压子系统,对车身附加横摆力矩进行优化分配,以提高电动汽车在转向、制动工况的横向稳定性。
[0023]
在控制策略中,将车身横摆角速度、车轮横向载荷转移率和质心侧偏角作为控制变量,采用分层控制结构设计控制系统,上层为运动跟踪层,基于参考模型跟踪的控制算法,根据车辆当前状态反馈和参考模型的理想状态,利用模糊控制理论计算控制所需的附加横摆力矩;下层为力矩分配控制层,充分考虑各种约束条件,将车身附加横摆力矩分配给各个车轮,实现对电动汽车横向稳定性的控制。
[0024]
以上结合最佳实施例对本发明进行了描述,但本发明并不局限于以上揭示的实施例,而应当涵盖各种根据本发明的本质进行的修改、等效组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1