一种车辆的控制方法及控制系统与流程
1.本发明涉及车辆技术领域,具体涉及一种车辆的控制方法及控制系统。
背景技术:
2.当前的智能驾驶系统,车辆在跟车行驶时,与前车的车距控制一般仅和前车的车速有关,或者,也可以设计为定值,这种控制方式的安全性相对较差。
技术实现要素:
3.本发明的目的是提供一种车辆的控制方法及控制系统,可以提高行车的安全性。
4.为解决上述技术问题,本发明提供一种车辆的控制方法,所述控制方法包括如下步骤:步骤s1,获取前车的车辆类型信息;步骤s2,判断所述车辆类型信息是否为大型汽车,若是,执行下述步骤s3,若否,执行下述步骤s4;步骤s3,开启大车距控制模式;步骤s4,开启普通车距控制模式;所述大车距控制模式下的跟车距离和停车距离均大于所述普通车距控制模式。
5.区别于背景技术,本发明所提供车辆的控制方法还充分考虑了前车的类型,当前车的类型为大型汽车时,还可以开启大车距控制模式,大车距控制模式下的跟车距离和停车距离均大于普通车距控制模式,能够大幅地提高行车的安全性。
6.本发明还提供一种车辆的控制方法,所述控制方法包括如下步骤:步骤s1,获取前车的车辆类型信息;步骤s2,判断所述车辆类型信息是否为大型汽车,若是,执行下述步骤s3,若否,执行下述步骤s6;步骤s3,检测是否存在可变道车道,若是,执行下述步骤s4,若否,执行下述步骤s5;步骤s4,控制车辆进行变道,并重新执行所述步骤s1;步骤s5,开启大车距控制模式;步骤s6,开启普通车距控制模式;所述大车距控制模式下的跟车距离和停车距离均大于所述普通车距控制模式。
7.可选地,所述大车距控制模式下的跟车距离为所述普通车距控制模式下的跟车距离的n倍,n》1。
8.可选地,所述停车距离包括跟停距离和紧急停车距离;所述大车距控制模式下的所述跟停距离为所述普通车距控制模式下的所述跟停距离与第一设定值的求和,所述大车距控制模式下的所述紧急停车距离为所述普通车距控制模式下的所述紧急停车距离与第二设定值的求和;所述第一设定值、所述第二设定值均大于0。
9.本发明还提供一种车辆的控制系统,包括:获取模块,用于获取前车的车辆类型信息;控制模块,所述控制模块能够在所述车辆类型信息为大型汽车时、开启大车距控制模式,所述控制模块能够在所述车辆类型信息为非大型汽车时、开启普通车距控制模式。
10.可选地,还包括提示模块和输入模块,所述提示模块与所述获取模块信号连接,用于提示所述车辆类型信息,所述输入模块与所述控制模块信号连接,通过所述输入模块能够向所述控制模块发送控制指令。
11.本发明还提供一种车辆的控制系统,包括:获取模块,用于获取前车的车辆类型信
息;检测模块,与所述获取模块信号连接,用于接收所述车辆类型信息,所述检测模块用于在所述车辆类型信息为大型汽车时、检测是否存在可变道车道;控制模块,所述控制模块能够在所述检测模块未发现所述可变道车道时、开启大车距控制模式,所述控制模块还能够在所述检测模块发现所述可变道车道时、控制车辆进行变道,所述控制模块能够在所述车辆类型信息为非大型汽车时、开启普通车距控制模式。
12.可选地,还包括提示模块和输入模块,所述提示模块与所述获取模块、所述检测模块均信号连接,用于提示所述车辆类型信息和是否存在可变道车道的信息,所述输入模块与所述控制模块信号连接,通过所述输入模块能够向所述控制模块发送控制指令。
13.可选地,所述检测模块包括获取单元和判断单元,所述获取单元用于获取道路环境信息,所述判断单元和所述获取单元信号连接,所述判断单元用于接收所述道路环境信息、并能够根据所述道路环境信息判断是否存在可变道车道。
14.可选地,所述大车距控制模式下的跟车距离为所述普通车距控制模式下的跟车距离的n倍,n》1;所述停车距离包括跟停距离和紧急停车距离;
15.所述大车距控制模式下的所述跟停距离为所述普通车距控制模式下的所述跟停距离与第一设定值的求和,所述大车距控制模式下的所述紧急停车距离为所述普通车距控制模式下的所述紧急停车距离与第二设定值的求和;
16.所述第一设定值、所述第二设定值均大于0。
附图说明
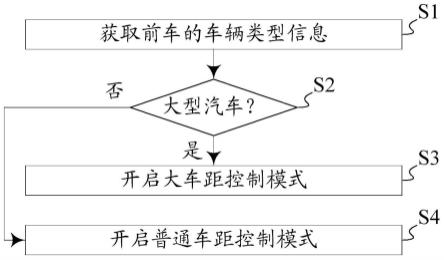
17.图1为本发明所提供车辆的控制方法的一种具体实施方式的流程示意图;
18.图2为本发明所提供车辆的控制方法的另一种具体实施方式的流程示意图;
19.图3为本发明所提供车辆的控制系统的一种具体实施方式的结构示意图;
20.图4为本发明所提供车辆的控制系统的另一种具体实施方式的结构示意图。
具体实施方式
21.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
22.本文中所述“第一”、“第二”等词,仅是为了便于描述结构和/或功能相同或者相类似的两个以上的结构或者部件,并不表示对于顺序和/或重要性的某种特殊限定。
23.请参考图1-图4,图1为本发明所提供车辆的控制方法的一种具体实施方式的流程示意图,图2为本发明所提供车辆的控制方法的另一种具体实施方式的流程示意图,图3为本发明所提供车辆的控制系统的一种具体实施方式的结构示意图,图4为本发明所提供车辆的控制系统的另一种具体实施方式的结构示意图。
24.实施例一
25.如图1所示,本发明提供一种车辆的控制方法,该控制方法包括如下步骤:步骤s1,获取前车的车辆类型信息;步骤s2,判断车辆类型信息是否为大型汽车,若是,执行下述步骤s3,若否,执行下述步骤s4;步骤s3,开启大车距控制模式;步骤s4,开启普通车距控制模式;大车距控制模式下的跟车距离和停车距离均大于普通车距控制模式。
26.区别于背景技术,本发明所提供车辆的控制方法还充分考虑了前车的类型,当前
车的类型为大型汽车时,还可以开启大车距控制模式,大车距控制模式下的跟车距离和停车距离均大于普通车距控制模式,能够大幅地提高行车的安全性。
27.需要说明的是,在我国,交通管理部门把汽车分为大型汽车和小型汽车,其中,大型汽车是指总质量4.5t(含)、乘坐人数(驾驶员除外)20人(含)或车长6m(含)以上的汽车,如普通大客车、中型以上载货汽车及大型专用汽车等,大型汽车通常配置尺寸前小后大、黄底黑字的汽车号牌。
28.在上述控制方法中,步骤s3和步骤s4可以由车辆内智控设备自行进行实施,或者,也可以由驾驶人员进行切换,此时,车辆内可以设置有提示模块,在步骤s2的判断结果出来后,可以由提示模块发出提示信息,然后由驾驶人员自行选择是否进入相应的控制模式。
29.这里,本发明实施例并不限定大车距控制模式为何种控制模式,其具体与普通车距控制模式有关,只要保证大车距控制模式比普通车距控制模式的跟车距离和停车距离要大即可,而普通车距控制模式的具体情形可以参照现有技术。
30.在一种示例性的方案中,大车距控制模式下的跟车距离可以为普通车距控制模式下的跟车距离的n倍,且n》1,这样,即可以保证大车距控制模式下的跟车距离大于普通车距控制模式。
31.除了上述的倍数关系之外,也可以采用设置固定值的方案,即采用大车距控制模式下的跟车距离与普通车距控制模式下的跟车距离的差值为固定值的方案。
32.一般而言,普通车距控制模式下的跟车距离与跟车挡位和前车车速(可通过设置于车辆的传感器获得)有关,例如,可以为跟车挡位和前车车速的乘积。考虑到现有车辆的挡位可能不是数值挡位(如l挡等),因此,可以将本车辆的跟车挡位替换为等效数值挡位信息,然后采用等效数值挡位信息和前车车速的乘积来作为跟车距离。
33.使用不同挡位跟车时,n的取值可以是相同的,也可以是不同的,具体可以结合实际需要进行设定。
34.结合上述设定,本发明所提供车辆的控制方法中的跟车距离的一种示例性的方案可以参照下述的表1。
35.表1普通车距控制模式和大车距控制模式下的跟车距离对比表
36.跟车挡位1挡2挡3挡普通车距控制模式1
×
前车车速1.5
×
前车车速2
×
前车车速大车距控制模式1
×
前车车速
×
n1.5
×
前车车速
×
n2
×
前车车速
×n37.停车距离可以包括跟停距离和紧急停车距离,跟停距离是指常规行驶过程中的跟停车距,例如自动驾驶系统中所设定的跟停车距,而紧急停车距离则是指aeb(autonomous emergency braking,即自动制动系统)停车时所设定的跟停车距。跟停距离通常也与跟车挡位有关,而紧急停车距离则通常为定值。
38.具体到本发明实施例中,大车距控制模式下的跟停距离可以为普通车距控制模式下的跟停距离与第一设定值的求和,大车距控制模式下的紧急停车距离可以为普通车距控制模式下的紧急停车距离与第二设定值的求和,其中,第一设定值、第二设定值均大于0。
39.基于上述内容,本发明所提供车辆的控制方法中的跟停距离和紧急停车距离的一种示例性的方案可以参照下述的表2和表3。
40.表2普通车距控制模式和大车距控制模式下的跟车距离对比表
[0041][0042]
表3普通车距控制模式和大车距控制模式下的紧急停车距离对比表
[0043]
普通车距控制模式1米大车距控制模式(1+第二设定值)米
[0044]
需要指出的是,大车距控制模式下的跟停距离和紧急停车距离除了设置固定值的方案,也可以采用前述的倍数关系,即采用大车距控制模式下的跟停距离和紧急停车距离均为普通车距控制模式下的m(m》1)倍的方案,这在具体实践中也是可行的。
[0045]
实施例二
[0046]
如图2所示,本发明还提供一种车辆的控制方法,该控制方法包括如下步骤:步骤s1,获取前车的车辆类型信息;步骤s2,判断车辆类型信息是否为大型汽车,若是,执行下述步骤s3,若否,执行下述步骤s6;步骤s3,检测是否存在可变道车道,若是,执行下述步骤s4,若否,执行步骤s5;步骤s4,控制车辆进行变道,并重新执行步骤s1;步骤s5,开启大车距控制模式;步骤s6,开启普通车距控制模式;大车距控制模式下的跟车距离和停车距离均大于普通车距控制模式。
[0047]
如实施例一部分所述,大型汽车相比于普通的小型汽车的尺寸等要大一些,在前车为大型汽车时,即便是增大了跟车车距,后车的驾驶人员和/或乘客仍有可能会感到一定的心理压力,并可能产生紧张情绪,进而影响安全驾驶。
[0048]
针对此,本实施例所提供方案还增加了步骤s3和步骤s4,当判断前车为大型汽车时,可以先寻求是否存在可变道车道,当存在可变道车道时,可以直接进行变道,以尽可能地避免与大型汽车处于同一车道,这样,可以更好地克服交通事故。
[0049]
这里的步骤s4同样可以是由车辆内部的智控设备自行进行控制,或者,也可以由驾驶人员进行切换,此时,车辆内可以设置有提示模块,在步骤s3的判断结果出来后,可以由提示模块发出提示信息,然后由驾驶人员自行选择是否进行变道。
[0050]
本实施例中,大车距控制模式以及普通车距控制模式下的跟车距离以及停车距离的相关限定可以参照前述实施例一,在此不做重复性的说明。
[0051]
实施例三
[0052]
如图3所示,本发明还提供一种车辆的控制系统,包括:获取模块,用于获取前车的车辆类型信息;控制模块,控制模块能够在车辆类型信息为大型汽车时、开启大车距控制模式,控制模块能够在车辆类型信息为非大型汽车时、开启普通车距控制模式。
[0053]
本实施例与实施例一中的控制方法相对应,那么,实施例一所具备的技术效果本实施例所提供车辆的控制系统亦当具备,在此不做赘述。
[0054]
获取模块与控制模块之间可以直接传递信号,进而由控制模块直接依据获取模块所获取的车辆类型信息进行控制模式的切换。
[0055]
或者,还可以包括提示模块和输入模块,提示模块可以与获取模块信号连接,输入模块可以与控制模块信号连接,在获取模块获取车辆类型信息后,可以由提示模块发送相应的提示信息,驾驶人员可以根据相应的提示信息、通过输入模块输入相应的控制指令,然后再由控制模块依据输入模块的相应指令切换控制模式,这在具体实践中也是可以采用的方案。
[0056]
提示模块和输入模块可以集成在一起,例如,二者可以为触摸屏,提示信息可以在该触摸屏上显示,输入模块也可以通过该触摸屏输入。当然,提示模块和输入模块也可以分别设置,例如,提示模块可以为显示屏,而输入模块可以为控制输入部件等。
[0057]
本实施例中,大车距控制模式以及普通车距控制模式下的跟车距离以及停车距离的相关限定可以参照前述实施例一,在此不做重复性的说明。
[0058]
实施例四
[0059]
如图4所示,本发明还提供一种车辆的控制系统,包括:获取模块,用于获取前车的车辆类型信息;检测模块,与获取模块信号连接,用于接收车辆类型信息,检测模块用于在车辆类型信息为大型汽车时、检测是否存在可变道车道;控制模块,控制模块能够在检测模块未发现可变道车道时、开启大车距控制模式,控制模块还能够在检测模块发现可变道车道时、控制车辆进行变道,控制模块能够在车辆类型信息为非大型汽车时、开启普通车距控制模式。
[0060]
本实施例与实施例二中的控制方法相对应,那么,实施例二所具备的技术效果本实施例所提供车辆的控制系统亦当具备,在此不做赘述。
[0061]
具体地,检测模块可以包括获取单元和判断单元,获取单元可用于获取道路环境信息,判断单元和获取单元可以信号连接,判断单元用于接收道路环境信息、并能够根据道路环境信息判断是否存在可变道车道,进而给出是否存在可变道车道的判断结果。
[0062]
与实施例三部分相类似,检测模块、获取模块与控制模块之间的信号传递可以为直接传递,进而直接由控制模块控制车辆进行变道以及相应控制模式的切换。或者,也可以设置提示模块和输入模块,提示模块与获取模块以及检测模块均可以信号连接,然后根据获取模块以及检测模块获取的信息发出相关提示,进而由驾驶人员通过输入模块输入相应的指令,然后再由控制模块进行执行。
[0063]
实施例三中的获取模块以及本实施例中的获取模块和获取单元均可以为雷达、摄像头等部件。
[0064]
本实施例中,大车距控制模式以及普通车距控制模式下的跟车距离以及停车距离的相关限定可以参照前述实施例一,在此不做重复性的说明。
[0065]
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1