一种自动泊车行车控制方法与流程
1.本发明涉及自动泊车技术领域,尤其涉及一种自动泊车行车控制方法。
背景技术:
2.自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
3.随着自动驾驶技术发展,自动泊车技术逐渐普及,针对自动泊车的功能安全问题也越来越多。在泊车过程中,如果泊车系统出现卡机、死机、无法通信等故障,将无法与车辆的控制系统进行通信,从而造成车辆失控、与障碍物碰撞的安全事故。
技术实现要素:
4.本发明提供一种自动泊车行车控制方法,解决了现有的自动泊车技术存在卡机、死机、无法通信等故障隐患,将引起车辆失控、与障碍物碰撞等安全隐患的技术问题。
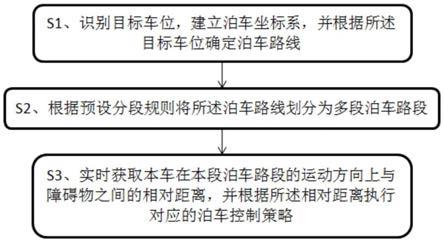
5.为解决以上技术问题,本发明提供一种自动泊车行车控制方法,包括步骤:
6.s1、识别目标车位,建立泊车坐标系,并根据所述目标车位确定泊车路线;
7.s2、根据预设分段规则将所述泊车路线划分为多段泊车路段;
8.s3、实时获取本车在运动方向上与障碍物之间的相对距离,并根据所述相对距离执行对应的泊车控制策略。
9.本基础方案以目标车位为终点,确定了车辆的泊车路径,设置预设分段规则将泊车路径划分为多段泊车路段,可将车辆泊车控制精细至每一段泊车路段;而在获取每一段路径的方向和行驶距离后,根据检测到的本车在运动方向上与障碍物之间的相对距离、泊车轨迹类型,执行对应的泊车控制,从而在泊车过程中出现故障后,依旧可以有效保证车辆泊车的安全。
10.在进一步的实施方案中,所述步骤s1包括;
11.s11、获取目标车位的图像,通过图像识别确定目标泊车位置;
12.s12、以泊车起始点上本车的后轮轴中点为坐标原点、以泊车方向为x轴正向、以本车横向远离泊车位方向为y轴正向建立泊车坐标系;
13.s13、根据所述目标泊车位置规划出本车的泊车路线。
14.在进一步的实施方案中,在所述步骤s2中:所述预设分段规则为,以所述泊车路线中的转向点为参考,划分所述泊车路线得到多段泊车路段。
15.本方案在根据实际的泊车过程中,车辆进行转向后路径将产生转折,路径的连贯性将被打断,因此选择泊车路线中的转向点作为参考,划分泊车路线将得到的多段独立且连贯的泊车路段,从而提高泊车安全计算效率。
16.在进一步的实施方案中,所述步骤s3包括;
17.s31、获取本车在本段所述泊车路段的运动方向上与障碍物之间的相对距离,若所述相对距离大于安全距离阈值,则进入下一步,否则控制本车停止运动;
18.s32、根据所述相对距离、泊车轨迹类型与本段所述泊车路段的剩余路段长度,计算本次的实际泊车距离。
19.本方案根据车辆安全行驶的要求,设置车辆与障碍物之间的安全距离阈值,作为预警标准,针对每一段泊车路径,计算车辆的实际泊车距离,从而进行障碍物的碰撞判断,并在实际泊车距离等于0即将撞上障碍物时,及时控制本车停止运动。
20.在进一步的实施方案中,若本段的所述泊车路段为直线泊车轨迹,所述步骤s32包括:获取所述障碍物与本车的第一距离,若所述第一距离小于或等于所述剩余路段长度,则根据第一预设关系式计算所述实际泊车距离,否则根据第二预设关系式计算所述实际泊车距离;
21.所述第一预设关系式为:
22.d(n)
i
=m(n)
i
‑
δ;
23.所述第二预设关系式为:
[0024][0025]
其中,m(n)
i
为在所述泊车路段上第i次获取的所述第一距离,d(n)
i
为第i次获取所述第一距离时的所述实际泊车距离,δ为安全距离阈值,d(n)
k
(k=0,1,2,3
…
i
‑
1)为在所述泊车路段上第k次获取的所述实际泊车距离,d(n)0=0,l(n)为所述泊车路段的长度。
[0026]
在进一步的实施方案中,若当前的所述泊车路段为弧形泊车轨迹,所述步骤s32包括:
[0027]
a、判断障碍物是否处于本段泊车路段的覆盖区域内,若是则进入下一步,若否则根据第三预设关系式确定所述实际泊车距离;
[0028]
所述第三预设关系式为:
[0029][0030]
其中,d(n)
i
为第i次获取所述第一距离时的所述实际泊车距离,d(n)
k
(k=0,1,2,3
…
i
‑
1)为在所述泊车路段上第k次获取的所述实际泊车距离,d(n)0=0;
[0031]
b、连接车辆轨迹的转向圆圆心与车辆尾部中点得到第一线段,计算所述第一线段的长度;
[0032]
c、连接车辆轨迹的转向圆圆心与障碍物坐标得到第二线段,在所述第二线段或其延长线上确定第一端点,使得车辆轨迹的转向圆圆心与所述第一端点的长度为所述第一线段的长度;
[0033]
d、计算第二距离,所述第二距离为以所述第一线段的长度为半径,所述第一线段、所述第二线段的夹角为圆心角对应的圆弧的长度;
[0034]
e、若所述第二距离小于或等于剩余路段长度,则根据第四预设关系式计算所述实际泊车距离,否则根据第三预设关系式计算所述实际泊车距离;
[0035]
在进一步的实施方案中,所述第二距离的计算公式如下:
[0036][0037]
其中,r表示第一线段的长度;(x1,y1)为所述障碍物的坐标;(x
oi
,y
oi
)为i个转向轨迹圆心的坐标;m(n)
i
为在所述泊车路段上第i次获取的所述第一距离。
[0038]
所述第四预设关系式为:
[0039]
d(n)
i
=q(n)
i
‑
δ;
[0040]
其中,d(n)
i
为第i次获取所述第一距离时的所述实际泊车距离,δ为安全距离阈值,q(n)
i
为在所述泊车路段上第i次获取的所述第二距离。
[0041]
本方案针对泊车路段为直线路段和弧形路段的实际情形,分别设置了对应的实际泊车距离计算公式,在判断出本段泊车路段的线路特性时,调用对应的公式并代入已知数值,可加快数据处理效率、提高泊车灵敏度、降低车辆碰撞风险。
[0042]
在进一步的实施方案中,所述判断所述障碍物是否处于所述泊车路段的覆盖区域内包括:
[0043]
根据所述泊车坐标系确定对应所述泊车路段的覆盖区域的坐标集、以及所述障碍物的坐标,若所述坐标集包含所述障碍物的坐标,则判断所述障碍物处于所述泊车路段的覆盖区域内,否则判断所述障碍物在所述泊车路段的覆盖区域之外。
[0044]
在进一步的实施方案中,所述泊车路段的覆盖区域的坐标集为:
[0045][0046]
其中,(x0,y0)为坐标原点o的坐标,k表示车身宽度,r表示车辆轨迹的转向圆半径。
附图说明
[0047]
图1是本发明实施例提供的一种自动泊车行车控制方法的工作流程图;
[0048]
图2是本发明实施例提供的泊车坐标系的示意图;
[0049]
图3是本发明实施例提供的预设分段规则的分段示意图;
[0050]
图4是本发明实施例提供的障碍物与车辆关系示意图;
[0051]
图5是本发明实施例提供的弧形路段特性的泊车路段示意图。
具体实施方式
[0052]
下面结合附图具体阐明本发明的实施方式,实施例的给出仅仅是为了说明目的,并不能理解为对本发明的限定,包括附图仅供参考和说明使用,不构成对本发明专利保护范围的限制,因为在不脱离本发明精神和范围基础上,可以对本发明进行许多改变。
[0053]
本发明实施例提供的一种自动泊车行车控制方法,如图1所示,在本实施例中,包括步骤:
[0054]
s1、识别目标车位,建立泊车坐标系,并根据目标车位确定泊车路线,包括步骤s11~s12;
[0055]
s11、获取目标车位的图像,通过图像识别确定目标泊车位置;
[0056]
s12、以泊车起始点上本车的后轮轴中点为坐标原点、以泊车方向为x轴正向、以本
车横向远离泊车位方向为y轴正向建立泊车坐标系,如图2所示;
[0057]
s13、根据目标泊车位置规划出本车的泊车路线。
[0058]
s2、根据预设分段规则将泊车路线划分为多段泊车路段。
[0059]
在本实施例中,本车在识别到车位后暂停,然后控制车辆以倒车的方式泊入车位。
[0060]
在本实施例中,预设分段规则为以泊车路线中的转向点为参考,划分泊车路线得到多段泊车路段。
[0061]
具体参见图3,根据泊车路线上的转向点进行划分(或者是说泊车过程中方向盘转角的变换次数划分泊车路径,每一次变换对应一转向点),得到多段泊车路段s1、s2
……
sn,对应的每段泊车路段的长度为l(1)、l(2)
……
l(n)。
[0062]
本实施例在根据实际的泊车过程中,车辆进行转向后路径将产生转折,路径的连贯性将被打断,因此选择泊车路线中的转向点作为参考,划分泊车路线将得到的多段独立且连贯的泊车路段,从而提高泊车安全计算效率。
[0063]
s3、实时获取本车在本段泊车路段的运动方向上与障碍物之间的相对距离,并根据相对距离执行对应的泊车控制策略,包括:
[0064]
s31、获取本车在本段泊车路段的运动方向上与障碍物之间的相对距离,若相对距离大于安全距离阈值,则进入下一步,否则控制本车停止运动;
[0065]
在本实施例中,所述相对距离与泊车轨迹类型相关,包括:直线泊车轨迹阶段的第一距离和弧形泊车轨迹阶段的第二距离。如图4所示,第一距离为障碍物z到车辆尾部中点或者头部中点的直线距离;如图5所示,第二距离为圆弧ab的长度。
[0066]
s32、根据相对距离、泊车轨迹类型与本段泊车路段的剩余路段长度,计算本次的实际泊车距离。
[0067]
在本实施例中,步骤s32包括:
[0068]
(1)若本段泊车路段为直线泊车轨迹,计算本次的实际泊车距离的方法为:
[0069]
获取障碍物与本车的第一距离m(n)
i
,若第一距离小于或等于剩余路段长度(即),则根据第一预设关系式计算实际泊车距离,否则根据第二预设关系式计算实际泊车距离;
[0070]
第一预设关系式为:
[0071]
d(n)
i
=m(n)
i
‑
δ;
[0072]
第二预设关系式为:
[0073][0074]
其中,m(n)
i
为在所述泊车路段上第i次获取的所述第一距离,d(n)
i
为第i次获取所述第一距离时的所述实际泊车距离,δ为安全距离阈值,d(n)
k
(k=0,1,2,3
…
i
‑
1)为在泊车路段上第k次获取的实际泊车距离,d(n)0=0,l(n)为所述泊车路段的长度。
[0075]
(2)参见图5,若当前的泊车路段为弧形泊车轨迹,计算本次的实际泊车距离的方法为:
[0076]
a、判断障碍物是否处于本段泊车路段的覆盖区域内,若是则进入下一步,若否则
根据第三预设关系式确定实际泊车距离。
[0077]
第三预设关系式为:
[0078][0079]
其中,d(n)
i
为第i次获取所述第一距离时的所述实际泊车距离,d(n)
k
(k=0,1,2,3
…
i
‑
1)为在所述泊车路段上第k次获取的所述实际泊车距离,d(n)0=0。
[0080]
在本实施例中,判断障碍物是否处于泊车路段的覆盖区域内包括:
[0081]
根据泊车坐标系确定对应泊车路段的覆盖区域的坐标集f(x,y)、以及障碍物的坐标(x1,y1),若坐标集f(x,y)包含障碍物的坐标(x1,y1),即(x1,y1)∈f(x,y),则判断障碍物处于泊车路段的覆盖区域内,否则判断障碍物在泊车路段的覆盖区域之外。
[0082]
在本实施例中,车辆转向轨迹弧形区域坐标集f(x,y)表示式为:
[0083][0084]
其中,(x0,y0)为坐标原点o的坐标,k表示车身宽度,r表示车辆轨迹的转向圆半径。
[0085]
b、连接车辆轨迹的转向圆圆心o
i
(x
oi
,y
oi
)与车辆尾部中点a得到第一线段,计算第一线段的长度r;
[0086]
c、连接车辆轨迹的转向圆圆心o
i
(x
oi
,y
oi
)与障碍物坐标z(x1,y1)得到第二线段,在第二线段或其延长线上确定第一端点b,使得车辆轨迹的转向圆圆心o
i
(x
oi
,y
oi
)与第一端点b的长度为第一线段的长度r;
[0087]
d、计算第二距离q(n)
i
,所述第二距离q(n)
i
为以第一线段的长度r为半径,第一线段、第二线段的夹角∠ao
i
b为圆心角对应的圆弧ab的长度,如图5所示;
[0088]
e、若第二距离q(n)
i
小于或等于剩余路段长度(即小于或等于剩余路段长度(即),则根据第四预设关系式计算实际泊车距离d(n)
i
,否则根据第三预设关系式计算实际泊车距离d(n)
i
。
[0089]
第二距离q(n)
i
的计算公式如下:
[0090][0091]
其中,r表示第一线段的长度;(x1,y1)为所述障碍物的坐标;(x
oi
,y
oi
)为i个转向轨迹圆心的坐标;m(n)
i
为在所述泊车路段上第i次获取的所述第一距离。
[0092]
第四预设关系式为:
[0093]
d(n)
i
=q(n)
i
‑
δ;
[0094]
其中,d(n)
i
为第i次获取所述第一距离时的所述实际泊车距离,δ为安全距离阈值,q(n)
i
为在所述泊车路段上第i次获取的所述第二距离。
[0095]
本实施例针对泊车路段为直线路段和弧形路段的实际情形,分别设置了对应的实际泊车距离计算公式,在判断出本段泊车路段的线路特性时,调用对应的公式并代入已知数值,可加快数据处理效率、提高泊车灵敏度、降低车辆碰撞风险。
[0096]
本发明实施例以目标车位为终点,确定了车辆的泊车路径,设置预设分段规则将泊车路径划分为多段泊车路段,可将车辆泊车控制精细至每一段泊车路段;而在获取每一段路径的方向和行驶距离后,根据检测到的本车在运动方向上与障碍物之间的相对距离、泊车轨迹类型,执行对应的泊车控制,从而在泊车过程中出现故障后,依旧可以有效保证车辆泊车的安全。
[0097]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1