一种基于电动汽车线控底盘的线控制动失效保护系统的制作方法
1.本发明涉及汽车电子技术领域,特别涉及一种基于电动汽车线控底盘的线控制动失效保护系统,应用于电动汽车线控底盘产品。
背景技术:
2.汽车的智能化和电动化推动着汽车电子的改革,随着电动汽车线控底盘系统的逐渐发展,汽车逐渐向更加智能化、安全化、集成化方向发展,这样就需要更多的传感器和集成式整车控制器vcu进行感知并执行控制,集成式整车控制器vcu电子零部件的增加导致车辆在整线布局空间上面具有一定的困难,且只具有一定的控制功能。集成式整车控制器vcu通过接收液压力传感器、位移传感器、abs模块的信号并进行对比分析,进而判断线控制动系统是否失效,最后采取对应的措施进行紧急制动,具有一定的集成度和可执行功能。本发明中的电路设计能有效结合电子驻车制动功能,增大集成式整车控制器vcu的电路集成度,扩展集成电子制动功能,能够节省vcu整车控制器的电路结构空间,增加电路集成度,执行电子制动驻车功能,并且可以通过与液压力传感器、位移传感器、abs模块的结合实现更快、更安全的制动,避免了制动失效问题。
技术实现要素:
3.为了增加整车控制器vcu的集成度,扩展其控制功能,增加线控制动的安全性,本发明提供了一种基于电动汽车线控底盘的线控制动失效保护系统,包括驱动电机(1)、变速器(2)、差速器(3)、转向拉杆(4)、abs模块(5)、esp(6)、制动主缸(7)、储油罐(8)、集成电机(9)、制动踏板(10)、epb控制器(11)、制动卡钳(12)、电机(13)动力电池(14)、eps控制器(15)、助力转向电机(16)、转向器(17)、逆变器(18)、dc
‑
ac逆变器(19)、制动踏板(20)、集成电机(21)、储液罐(22)、制动主缸(23)、左前制动轮缸(24)、右前制动轮缸(25)、左后制动轮缸(26)、右后制动轮缸(27)、abs模块(28)、esp(29)、液压力传感器(30)、位移传感器(31)、集成式整车控制器vcu(32);补充1
‑
18之间的连接关系描述;所述制动失效保护系统由电源、集成式整车控制器vcu(32)、液压力传感器(30)、位移传感器(31)、abs模块(28)、制动主缸(23)、左前制动轮缸(24)、右前制动轮缸(25)、左后制动轮缸(26)、右后制动轮缸(27)组成,所述位移传感器信号与液压力传感器信号输出至集成式整车控制器vcu(32)。
4.进一步地,epb控制器(11)集成到整车控制器vcu(32)内部形成集成式整车控制器vcu(32)。
5.进一步地,液压力传感器(30)、位移传感器(31)、abs模块(28)接入集成式整车控制器vcu(32)模块。
6.进一步地,制动卡钳c与制动卡钳d通过电机接入到集成式整车控制器vcu(32)。
7.进一步地,液压力传感器(30)、位移传感器(31)的信号由集成式整车控制器vcu(32)收集处理。
8.本发明实现了保证整车控制功能的情况下,通过将epb控制器(11)集成到整车控制器vcu(32)内部电路结构,实现电子驻车功能直接通过集成式整车控制器vcu(32)模块进行控制,并且通过液压力传感器(30)、位移传感器(31)、abs模块(28)接入集成式整车控制器vcu(32)模块,通过对比液压力传感器(30)、位移传感器(31)的信号强度与反应时间来判断线控制动是否出现失效,当线控制动系统出现失效时,集成式整车控制器vcu(32)会直接触发abs模块和电子驻车功能进行紧急制动,从而达到制动失效保护的作用,既能增加整车电路集成度,增强系统抗干扰能力,又可以提供线控制动系统失效保护方案,提高行车制动安全性。
附图说明
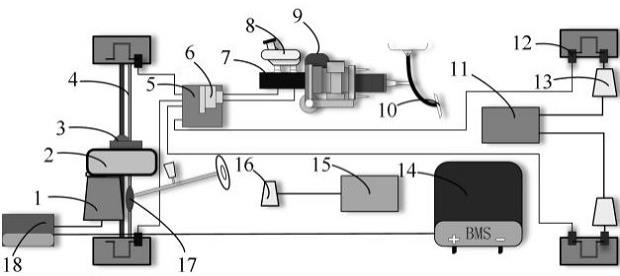
9.图1是本发明一种基于电动汽车线控底盘的线控制动失效保护系统的线控底盘结构示意图。
10.图2是本发明一种基于电动汽车线控底盘的线控制动失效保护系统的制动失效保护示意图。
11.图3是本发明一种基于电动汽车线控底盘的线控制动失效保护系统的系统失效触发电路流程图。
12.附图标记:1、驱动电机,2、变速器,3、差速器,4、转向拉杆,5、abs模块,6、esp,7、制动主缸,8、储油罐,9、集成电机,10、制动踏板,11、epb控制器,12、制动卡钳,13、电机,14、动力电池,15、eps控制器,16、助力转向电机,17、转向器,18、逆变器,19、dc
‑
ac逆变器,20、制动踏板,21、集成电机,22、储液罐,23、制动主缸,24、左前制动轮缸,25、右前制动轮缸,26、左后制动轮缸,27、右后制动轮缸,28、abs模块,29、esp,30、液压力传感器,31、位移传感器,32、集成式整车控制器vcu。
具体实施方式
13.如图1、图2所示,一种基于电动汽车线控底盘的线控制动失效保护系统,包括驱动电机1、变速器2、差速器3、转向拉杆4、abs模块5、esp6、制动主缸7、储油罐8、集成电机9、制动踏板10、epb控制器11、制动卡钳12、电机13动力电池14、eps控制器15、助力转向电机16、转向器17、逆变器18、dc
‑
ac逆变器19、制动踏板20、集成电机21、储液罐22、制动主缸23、左前制动轮缸24、右前制动轮缸25、左后制动轮缸26、右后制动轮缸27、abs模块28、esp29、液压力传感器30、位移传感器31、集成式整车控制器vcu32;epb控制器11集成到整车控制器vcu32内部形成集成式整车控制器vcu32,液压力传感器30、位移传感器31、abs模块28接入集成式整车控制器vcu32模块,制动卡钳c与制动卡钳d通过电机接入到集成式整车控制器vcu32,左前制动轮缸24、右前制动轮缸25、左后制动轮缸26、右后制动轮缸27接入所述abs模块28。
14.集成式整车控制器vcu32在保证原来的电路结构过程中还集成了epb控制器11控制模块,通过集成式整车控制器vcu32接受到的信号指令进行命令制动电机对制动卡钳施加压力实现电子驻车的功能。
15.如图3所示,液压力传感器30、位移传感器31、abs模块28接入集成式整车控制器vcu32模块,并且位移传感器31会实时收集制动踏板20的位移信号并上传给集成式整车控
制器vcu32模块,液压力传感器30会实时收集制动主缸23内的液压力信号并上传给集成式整车控制器vcu32模块,集成式整车控制器vcu32模块对这两个信号进行对比分析其信号强度与信号反应时间,当两个信号强度或者信号反应时间不能保持大体一致时,说明线控制动系统可能会出现制动失效的情况,会进一步判断两个信号的大小情况,当液压力传感器30信号强度大于位移传感器31的信号强度时,说明此时线控制动是处于过制动的状态,也是属于安全状态下,故失效保护系统不会被触发;当液压力传感器30信号强度小于位移传感器31的信号强度或液压力传感器30信号反应时间大于位移传感器31的信号反应时间时,说明线控制动系统出现制动失效的情况,此时集成式整车控制器vcu32会立刻触发abs系统对相应的制动轮缸进行建压制动,同时集成式整车控制器vcu32会直接控制制动电机对制动卡钳c和制动卡钳d进行施加压力,利用电子驻车功能进行紧急制动,直到液压力传感器30信号强度或反应时间与位移传感器31的信号强度或反应时间保持大体一致时,线控制动失效保护模式会自动退出,恢复到正常的制动模式,从而起到了线控制动失效保护的作用,增强了制动安全性和智能化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1