一种整车电控悬架系统的主动容错控制方法
1.本发明设计车辆底盘悬架控制领域,具体涉及到一种电控悬架中传感器和执行器以及控制器发生故障时的故障诊断与主动容错控制方法。
背景技术:
2.悬架系统是汽车中连接车身和车轮的一个重要结构组成,其主要作用是对路面产生的冲击载荷进行缓冲和衰减,以抑制车轮的跳动和降低车身的不规则振动,改善和提高车辆的行驶平顺性和操纵稳定性。
3.从可控性的角度,汽车悬架可以分为被动悬架、半主动悬架(参考zl202010233226.1)和主动悬架,由于被动悬架的刚度与阻尼不可调节,难以兼顾汽车的行驶平顺性和操纵稳定性,越来越多的车辆采用了半主动悬架和主动悬架,统称电控悬架(参考zl202110623048.8)。在电控悬架中,控制系统需要根据传感器采集到的车辆状态,经由控制器驱动执行器对悬架特性进行控制(参考zl2021104801808),而当传感器或执行器乃至控制器出现故障会导致悬架的工作可靠性降低以及性能恶化,甚至降低其使用寿命。
技术实现要素:
4.本发明是为了提高电控悬架系统的可靠性,提出了一种整车电控悬架系统的主动容错控制方法,以期通过解析冗余的方式诊断故障,实时定位电控悬架控制系统中故障发生位置,并通过将故障隔离和补偿输出来进行主动容错控制,从而能够在悬架系统中某部件发生故障时有效改善其可靠性,确保电控悬架功能的正常发挥,维持车辆的平顺性和操纵稳定性。
5.本发明为达到上述发明目的,采用如下技术方案:
6.本发明一种整车电控悬架系统的主动容错控制方法的特点包括:
7.步骤1、利用式(1)建立整车电控悬架系统的动力学模型的状态方程;
[0008][0009]
式(1)中,a为系统矩阵,b为控制矩阵,f为路面扰动输入矩阵,c为输出矩阵,d为传递矩阵,w表示悬架控制力矢量,并由式(2)得到;为路面的随机激励矢量z
t
的导数,且z
t
由式(3)得到;表示状态向量x的导数,且x=[x1x
2 x
3 x4]
t
,并利用式(4)得到,y为输出状态向量,且y=[y
1 y
2 y3]
t
,并利用式(5)得到:
[0010]
w=[f
mr1 f
mr2 f
mr3 f
mr4
]
t
ꢀꢀꢀ
(2)
[0011]
z
t
=[q
1 q
2 q
3 q4]
t
ꢀꢀꢀ
(3)
[0012][0013][0014]
式(2)中,f
mri
表示第i个车轮的电控悬架的控制力,i=1,2,3,4;
[0015]
式(3)中,q
i
表示第i个车轮处来自路面的随机激励,i=1,2,3,4;
[0016]
式(4)中,x1,x2,x3,x4分别表示状态向量x的4个分量;h表示转换矩阵,并由式(6)得到;表示车身的动力学响应矢量z
c
的导数,且z
c
由式(7)得到;表示非簧载质量的垂向位移矢量z
us
的导数,且z
us
由式(8)得到;
[0017]
式(5)中,y1,y2,y3分别表示输出状态向量y的3个分量;表示车身的动力学响应矢量z
c
的二阶导数;
[0018][0019]
z
c
=[z
g α β]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0020]
z
us
=[z
us1 z
us2 z
us3 z
us4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0021]
式(6)中,l1和l2分别表示质心到右轮和左轮的距离;a和b分别表示质心到前后轴的距离;
[0022]
式(7)中,z
g
表示车身的垂向运动位移;β表示车身的俯仰角;α表示车身的侧倾角;
[0023]
式(8)中,z
usi
表示第i个车轮的垂向位移;i=1,2,3,4;
[0024]
步骤2、传感器系统故障时的主动容错控制;
[0025]
步骤2.1、设传感器系统中共有m个测量值,将m个测量值分成m个不同的组合,且任意第σ个组合中不包括m个测量值中的第σ个测量值,从而使得每个组合中仅包含m
‑
1个测量值;σ∈[1,m];
[0026]
将每个组合分别作为m个卡尔曼滤波器的输入,利用卡尔曼滤波器对传感器系统的状态进行估计,得到状态估计值,并与其输入比较后得到残差r;对残差r进行加权平方和处理,得到处理后的残差wssr;
[0027]
步骤2.2、在无故障且无噪声干扰的条件下,残差为零;故障发生后,通过将加权平方和处理后的残差wssr与设定的理想阈值η
*
的比较,若残差wssr大于理想阈值η
*
,则表示发生故障,否则,表示无故障发生;
[0028]
步骤2.3、当无故障发生时,卡尔曼滤波器直接将传感器系统的测量值输出;当有故障发生时,卡尔曼滤波器根据状态估计值对故障传感器输出的测量值进行重构;将无故障的传感器测量值或经过重构的测量值输入到控制器中;
[0029]
步骤3、考虑整车行驶平顺性和操纵稳定性的电控悬架控制器的混合控制策略;
[0030]
利用式(9)建立控制器的混合控制策略表达式:
[0031]
f
d
=εf1+(1
‑
ε)f2ꢀꢀꢀꢀꢀ
(9)
[0032]
式(9)中,ε为加权系数,f
d
表示混合控制策略的控制力,f1和f2分别表示侧重于行驶平顺性和侧重于操纵稳定性的两种控制策略的控制力;
[0033]
根据输入所述控制器中的传感器测量值并结合车辆实际运行工况,改变加权系数ε并得到控制力f
d
后,经电驱动传递给执行器,使得车辆在“操纵稳定性”和“行驶平顺性”之间切换;
[0034]
步骤4、判断电控悬架系统执行器和控制器是否同时发生故障:
[0035]
计算电控悬架的实际动力学响应与理论值之间的偏差δ;若δ>δ1,则判断执行器和控制器均发生故障或控制器发生故障,对驾驶员报警提示;若δ2<δ<δ1,则判断执行器发生故障;若δ<δ2,则判断执行器和控制器均无故障发生,其中δ1和δ2为所设定的两个阈值,且δ1>δ2;
[0036]
步骤5、执行器故障时的主动容错控制;
[0037]
步骤5.1:建立执行器的故障模型;
[0038]
当执行器发生增益变化故障时,利用式(10)建立执行器的故障输出:
[0039]
u
mi
=(1
‑
λ
i
)u
i
ꢀꢀꢀꢀ
(10)
[0040]
式(10)中,u
mi
表示第i个执行器的故障输出值,u
i
表示第i个执行器的无故障输出值,λ
i
表示执行器发生增益变化故障时的程度,且λ
i
∈[0 1];i=1,2,3,4分别表示四个不同的执行器序号;
[0041]
步骤5.2:在确定故障发生之后,根据电控悬架的实际动力学响应与理论值之间的偏差e与控制参数的修正系数的正比关系,按照模糊规则对执行器的逆模型的控制参数进行修正补偿,以减少执行器的输出误差。
[0042]
本发明所述的主动容错控制方法的特点也在于,所述步骤1中的系统矩阵a,控制矩阵b,路面扰动输入矩阵f,输出矩阵c,传递矩阵d分别由式(11),式(12),式(13),式(14)和式(15)得到;
[0043][0044][0045]
[0046][0047][0048]
式(11),式(12),式(13),式(14)和式(15)中,h
t
表示转换矩阵h的转置矩阵,m
c
,k
s
,c
s
,m
t
,k
us
为五个参数矩阵,并分别由式(16),式(17),式(18),式(19)和式(20)得到,和分别表示m
c
和m
t
的逆矩阵;
[0049][0050][0051][0052][0053][0054]
式(16)中,m表示整车的簧载质量,j
α
和j
β
分别表示车身侧倾转动惯量和车身俯仰转动惯量;
[0055]
式(17)中,k
si
表示第i个车轮处悬架的刚度系数;i=1,2,3,4;
[0056]
式(18)中,c
i
表示第i个车轮处悬架的阻尼系数;i=1,2,3,4;
[0057]
式(19)中,m
i
表示第i个车轮的非簧载质量;i=1,2,3,4;
[0058]
式(20)中,k
usi
表示第i个车轮的轮胎刚度系数;i=1,2,3,4。
[0059]
所述步骤2中的理想阈值η
*
是按如下过程进行确定;
[0060]
利用式(21)构建阈值η的代价函数y(η),并求代价函数y(η)对阈值η的最小值,从而得到故障决策的理想阈值η
*
:
[0061]
y(η)=p
f
p
m
(η)+(1
‑
p
f
)p
fa
(η)
ꢀꢀꢀꢀ
(21)
[0062]
式(21)中,p
f
表示待检测信号的故障概率,p
m
表示故障信号的漏检率,p
fa
表示故障信号的误检率。
[0063]
所述步骤2的传感器系统的故障形式包括:传感器卡死、传感器噪声故障、传感器恒偏差故障;
[0064]
利用式(22)得到传感器系统的故障输出模型:
[0065]
s
mj
=δ
j
s
j
+φ
j
ꢀꢀꢀꢀꢀꢀ
(22)
[0066]
式(22)中,s
mj
表示第j个传感器的故障输出值;s
j
表示第j个传感器的无故障输出值;δj表示第j个传感器的故障增益,且δj∈[0 1];φ
j
表示第j个传感器出现卡死或恒偏差故障时的偏差值。
[0067]
与已有技术相比,本发明的有益效果体现在:
[0068]
1、本发明建立了整车电控悬架系统的动力学模型,为后续进行准确的故障诊断和主动容错控制创造了必要的前提。
[0069]
2、本发明利用基于解析冗余的故障诊断方法来诊断故障,相较于硬件检测方法,并没有增加控制系统的体积和系统中的硬件成本,可应用在装有电控悬架的普通车辆上,具有更好的应用价值。
[0070]
3、本发明提出的电控悬架主动容错控制方法,利用设计的一组卡尔曼滤波器,综合考虑到误检率和漏检率来设定理想阈值,能够诊断电控悬架系统中的传感器是否发生故障,并在故障发生时对故障信号进行隔离并输出重构,从而能够获取正确的车辆状态信息,提高了后续控制的准确性。
[0071]
4、本发明根据不同行驶工况下驾乘人员对于行驶平顺性和操纵稳定性的侧重需求,设计混合控制策略的电控悬架控制器,通过改变相应的加权系数即可实现电控悬架对于“行驶平顺性”和“操纵稳定性”之间的侧重切换。
[0072]
5、本发明能够检测执行器和控制器是否同时发生故障;在执行器故障发生故障时根据偏差的大小,利用模糊规则对控制参数修正补偿;在控制器发生故障时报警提示;从而尽可能地降低故障带来的控制结果偏差,使得电控悬架系统运行更加稳定可靠,车辆的平顺性和操纵稳定性也相应地得到了保证。
附图说明
[0073]
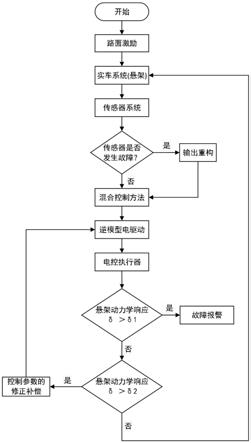
图1为本发明整个控制过程的流程图;
[0074]
图2为现有整车垂向七自由度模型原理图;
[0075]
图3为卡尔曼滤波实现的原理图;
[0076]
图4为本发明用于传感器系统故障隔离与输出重构的原理图。
具体实施方式
[0077]
本实施例中,一种整车电控悬架的主动容错控制方法,如图1所示,是按如下步骤进行的:
[0078]
步骤1:建立整车电控悬架系统的动力学模型;
[0079]
步骤1.1:如图2所示为整车七自由度电控悬架系统模型,七个自由度分别是四个车轮的垂向位移(z
us1
,z
us2
,z
us3
,z
us4
)、车身的垂向运动位移z
g
、车身的俯仰角β和车身的侧倾角α。为了方便描述,定义七个自由度z
us1
,z
us2
,z
us3
,z
us4
,z
g
,β,α为广义坐标,簧载质量垂向位移z
s1
,z
s2
,z
s3
,z
s4
为冗余坐标,利用式(1)得到簧载质量的垂向位移和车身动力学响应的关系式:
[0080]
z
s
=hz
c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0081]
式(1)中,z
s
表示簧载质量垂向位移矢量,并由式(2)得到,h表示转换矩阵,并由式(3)得到,z
c
表示车身的动力学响应矢量,并由式(4)得到:
[0082]
z
s
=[z
s1 z
s2 z
s3 z
s4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0083][0084]
z
c
=[z
g
αβ]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0085]
式(3)中,l1和l2分别表示质心到右轮和左轮的距离;a和b分别表示质心到前后轴的距离;
[0086]
步骤1.2:建立整车七自由度电控悬架系统的动力学方程:
[0087][0088][0089][0090][0091][0092][0093][0094]
式(5),式(6),式(7),式(8),式(9),式(10)和式(11)中,m表示整车的簧载质量;m
i
表示非簧载质量;j
α
和j
β
分别表示车身侧倾转动惯量和车身俯仰转动惯量;表示簧载质量的垂向速度;表示非簧载质量的垂向速度;表示车身的垂向加速度;表示车身的俯仰角加速度;表示车身的侧倾角加速度;表示车轮的垂向加速度;f
mri
表示电控悬架的控制力;k
si
表示悬架的刚度系数;k
usi
表示轮胎的刚度系数;c
i
表示悬架的阻尼系数;q
i
表
示来自路面的随机激励。i=1,2,3,4分别表示4个不同的车轮。
[0095]
步骤1.3建立簧载和非簧载质量的动力学方程;
[0096]
现将系统分成两个互相关联的子系统,簧载质量子系统一和非簧载质量子系统二,以便将整个系统进行矩阵化表示。
[0097]
利用式(12)建立簧载子系统一的动力学方程:
[0098][0099]
式(12)中,m
c
,k
s
,c
s
为3个参数矩阵,分别由式(13),式(14)和式(15)得到,h
t
表示转换矩阵h的转置矩阵,分别表示车身的动力学响应矢量z
c
的一阶导数和二阶导数,表示非簧载质量的垂向位移矢量z
us
的导数,并且z
us
由式(16)得到,w表示悬架控制力矢量,并由式(17)得到:
[0100][0101][0102][0103]
z
us
=[z
us1 z
us2 z
us3 z
us4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0104]
w=[f
mr1 f
mr2 f
mr3 f
mr4
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0105]
利用式(18)建立非簧载子系统二的动力学方程:
[0106][0107]
式(18)中,m
t
,k
us
为2个参数矩阵,分别由式(19),式(20)得到,表示非簧载质量的垂向位移矢量z
us
的二阶导数,z
t
为路面的随机激励矢量,并由式(21)得到:
[0108][0109][0110]
z
t
=[q
1 q
2 q
3 q4]
t (21)
[0111]
步骤1.4:建立所述动力学模型的状态方程;
[0112]
利用式(22)得到状态向量x=[x
1 x
2 x
3 x4]
t
:
[0113][0114]
式(22)中,x1,x2,x3,x4分别表示状态向量的4个分量。
[0115]
利用式(23)得到输出状态向量y=[y
1 y
2 y3]
t
:
[0116][0117]
式(23)中,y1,y2,y3分别表示输出状态向量的3个分量。
[0118]
利用式(24)得到整车动力学模型的状态方程:
[0119][0120]
式(24)中,a为系统矩阵,b为控制矩阵,f为路面扰动输入矩阵,c为输出矩阵,d为传递矩阵,并由式(25),式(26),式(27),式(28)和式(29)得到,和分别表示m
c
和m
t
的逆矩阵;
[0121][0122][0123][0124]
[0125][0126]
步骤2:传感器系统故障时的主动容错控制;
[0127]
步骤2.1:建立传感器系统的故障输出模型;传感器系统的故障形式包括:传感器卡死、传感器噪声故障、传感器恒偏差故障。传感器卡死故障是指传感器的输出信号卡死在某一固定输出值;传感器发生漂移故障时输出信号与实际测量真值之间存在一定的偏差;传感器噪声故障时会出现测量值与输出真值对比存在较大的噪声干扰。
[0128]
假设汽车电控悬架第j个传感器发生前述故障,利用式(30)建立对应的传感器故障模型:
[0129]
s
mj
=δ
j
s
j
+φ
j
ꢀꢀꢀꢀꢀꢀꢀ
(30)
[0130]
式(30)中,s
mj
表示第j个传感器的故障输出值;s
j
表示第j个传感器的无故障输出值;δj表示第j个传感器的故障增益,δj∈[0 1];φ
j
表示第j个传感器出现卡死或恒偏差故障时的偏差值。
[0131]
步骤2.2:利用无迹卡尔曼滤波器对传感器系统状态进行估计,其流程如图3所示,得到状态估计值,并与其输入比较后得到残差;残差指的是被观测对象的测量值与其期望值之差,可以用来反映系统的故障信息。
[0132]
假设系统由式(31)表示:
[0133][0134]
残差的生成过程为:
[0135]
①
获得一组采样点x
(i)
(k|k)以及采样点对应的权值w
i
;
[0136]
②
利用式(32)一步预测得到新的预测点集x
(i)
(k+1|k);
[0137]
x
(i)
(k+1|k)=φx
(i)
(k|k)+lu(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(32)
[0138]
③
计算系统状态量的一部最佳估计及对应的协方差矩阵p(k+1|k);
[0139]
④
由一步预测结果使用无迹变换,产生新的采样点集;
[0140]
⑤
结合新的采样点集利用式(33)计算系统的观测预测值z
(i)
(k+1|k);
[0141]
z
(i)
(k+1|k)=ix
(i)
(k+1|k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(33)
[0142]
⑥
加权求得最佳预测值
[0143]
⑦
与传感器的实际测量值对比,得到系统残差r(k);
[0144]
为了减少干扰信号的影响,对残差进行加权平方和处理,得到处理后的残差wssr(k)。
[0145]
步骤2.3:确定故障决策的理想阈值η
*
;
[0146]
假设存在两个被比较的信号θ1和θ2,且θ1,θ2~n(μ,σ2),令v=|θ1‑
θ2|,利用式(34)得到z的概率密度函数f(v):
[0147]
[0148]
假设阈值为η,利用式(35)计算误检率函数p
fa
:
[0149][0150]
若θ1和θ2中有一个信号发生偏置量为q的故障,利用式(36)计算v=|θ1‑
θ2|的概率密度函数f
v
(v|q):
[0151][0152]
利用式(37)计算漏检率函数p
m|q
:
[0153][0154]
假设q在[
‑
g g]上服从均匀分布,利用式(38)计算总的漏检率p
m
:
[0155][0156]
被检测信号的故障概率p
f
由式(39)表示:
[0157][0158]
式(39)中,δt为检测系统观察周期,t为系统平均无故障工作时间。
[0159]
利用式(40)构建阈值η的代价函数y(η):
[0160]
y(η)=p
f
p
m
(η)+(1
‑
p
f
)p
fa
(η)
ꢀꢀꢀꢀꢀꢀꢀ
(40)
[0161]
式(40)中,等式右边第一项表示系统发生故障时存在漏检,第二项表示未发生故障时存在误检,求代价函数y(η)对阈值η的最小值,得到理想阈值η
*
。
[0162]
在无故障且无噪声干扰的条件下,残差为零;故障发生后,通过将加权平方和处理后的残差wssr(k)与设定的理想阈值η
*
比较,若残差wssr(k)大于理想阈值η
*
,则表示发生故障,否则,表示无故障发生;
[0163]
步骤2.4:将传感器故障信号进行隔离并输出重构;
[0164]
设传感器系统共有m个测量值,将这m个测量值分成m个不同的组合,且任意第σ个组合中不包括m个测量值中的第σ个测量值,从而使得每个组合中仅包含m
‑
1个测量值;σ∈[1,m];将每个组合分别作为设计的m个卡尔曼滤波器的输入。当某个传感器j发生故障时,只有不包括该传感器观测量的输入组合对应的卡尔曼滤波器的输出残差满足故障诊断的阈值要求,于是故障便可被分离出来。
[0165]
由所设计的卡尔曼滤波器组可知,当无故障发生时,卡尔曼滤波器直接将传感器的测量信号输出;当第j个传感器发生故障时,滤波器组中的第j个滤波器的输入信号中不含故障传感器的观测值,由此可以根据余下的m
‑
1个传感器的观测值对输出信号和状态变量准确估计,根据状态估计值完成对故障传感器输出的测量值进行重构。实现的具体过程如图4所示。将无故障的传感器测量值或经过重构的测量值输入到控制器中;
[0166]
步骤3:考虑整车行驶平顺性和操纵稳定性的电控悬架控制器的混合控制策略;
[0167]
步骤3.1:利用式(41)建立控制律表达式:
[0168]
f
d
=εf1+(1
‑
ε)f2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(41)
[0169]
式(41)中,f
d
表示混合控制策略的控制力,ε为加权系数,f1和f2分别表示侧重于行驶平顺性和侧重于操纵稳定性的两种控制策略的控制力;
[0170]
步骤3.2:单一的控制策略在提高簧载质量振动特性的同时会相应地导致非簧载质量振动状态的恶化,会使汽车的操纵稳定性降低;而在改善非簧载质量振动特性提高操纵稳定性的同时,会加剧簧载质量的振动,从而使行驶平顺性降低。根据输入到控制器中的传感器的测量值结合车辆实际运行需要,改变加权系数ε并得到控制力f
d
后,经电驱动传递给执行器,使得车辆在“操纵稳定性”和“行驶平顺性”之间切换;
[0171]
步骤4:判断电控悬架系统执行器和控制器是否同时发生故障;
[0172]
计算电控悬架的实际动力学响应与理论值之间偏差δ;若δ>δ1,则判断执行器和控制器均发生故障或控制器发生故障,对驾驶员报警提示;若δ2<δ<δ1,则判断执行器发生故障;若δ<δ2,则判断执行器和控制器均无故障发生,其中δ1和δ2为所设定的两个阈值,且δ1>δ2;
[0173]
步骤5:执行器故障时的主动容错控制;
[0174]
步骤5.1:建立执行器的故障模型;
[0175]
类似地,常见的执行器故障有增益变化、卡死和恒偏差等情况,不失一般性,仅考虑汽车电控悬架执行器发生增益变化故障。对装有四个执行器的整车电控悬架来说,当执行器发生增益变化故障时,利用式(42)建立执行器的故障输出:
[0176]
u
mi
=(1
‑
λ
i
)u
i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(42)
[0177]
式(42)中,u
mi
表示第i个执行器的故障输出值,u
i
表示第i个执行器的无故障输出值,λ
i
表示执行器发生增益变化故障时的程度,且λ
i
∈[0 1];i=1,2,3,4分别表示四个不同的执行器序号;
[0178]
由式(41)可知,
[0179]
当λ
i
=1时,表示执行器发生完全增益损失故障;
[0180]
当λ
i
=0时,表示执行器无故障;
[0181]
当0<λ
i
<1时,表示执行器发生部分增益损失故障。
[0182]
步骤5.2:建立执行器故障时的主动容错控制方法
[0183]
在确定故障发生之后,对执行器的逆模型的控制参数进行修正补偿,从而减少执行器的输出误差。
[0184]
假设悬架系统的动力学响应的实际值与理论值分别为y和y0,则当前时刻的偏差e=y0‑
y。
[0185]
本实施例中,将偏差e分为5个模糊集:负大(nb),负小(ns),零(zo),正小(ps),正大(pb);偏差的变化范围分为7个等级:
‑
3,
‑
2,
‑
1,0,+1,+2,+3,得到偏差的模糊划分表,如表1所示:
[0186]
表1
[0187][0188]
控制量为控制参数的修正系数将其分为5个模糊集:负大(nb),负小(ns),零(zo),正小(ps),正大(pb);修正系数的变化范围分为9个等级:
‑
4,
‑
3,
‑
2,
‑
1,0,+1,+2,+3,+4,得到修正系数的模糊划分表,如表2所示:
[0189]
表2
[0190][0191]
相应的模糊规则如下:
[0192]
(1)若e负大,则负大;
[0193]
(2)若e负小,则负小;
[0194]
(3)若e为零,则为零;
[0195]
(4)若e正小,则正小;
[0196]
(5)若e正大,则正大。
[0197]
从而可以根据输出偏差来实时调整逆模型中的控制参数,以实现主动容错控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1