全智能无人操控蓄电式牵引机车运转系统
1.本发明涉及电力机车领域,具体地说是一种全智能无人操控的蓄电式牵引机车运转系统。
背景技术:
2.钢厂内部用于铁水场内转运的蓄电式牵引机车,经常需要小时连续运转。目前,蓄电式牵引机车大多数采用蓄电池作为动力源,蓄电池续航能力一般是一天充电一次,每次充电至少两个小时。蓄电池的容量与体积和价格成正比,因此续航能力越强,电池体积越大,价格也越贵。蓄电式牵引机车充电时需要将机车行驶至指定区域进行长时间充电,尤其是在钢厂用于场内铁水罐运输的蓄电式牵引机车负载大,耗电多,因电池需要充电不能连续运转,且电池容量与体积和价格成正比,对电池充电的快速性要求高。
3.现有的场内牵引机车,大多数是人为操控,需要司机师傅倒班连运,需要司机师傅的注意力高度集中。尤其是夜班时候,很容易由于司机师傅失误导致在靠近高炉灌装铁水时机车停车不到位、机车车速转换不及时等影响灌装效率或效果,还会存在伤害操作人员人身安全的隐患。
技术实现要素:
4.本发明是针对背景技术中提及的现有场内电力机车存在的弊端,提供一种全智能无人操控蓄电式牵引机车运转系统。
5.为实现上述发明目的,本发明采用的技术方案是:一种全智能无人操控蓄电式牵引机车运转系统,包括蓄电式的牵引机车、供牵引机车行进的轨道,还包括无人驾驶机构和远程监控机构;所述轨道;为智能轨道,包括裸露在外的行驶区和置于高炉外侧的室内等待区;行驶区的轨道上铺设有光伏发电板;所述等待区的轨道上铺设无线充电线圈;所述光伏发电板和无线充电线圈均与设置在等待区的储备电源连接;所述无人驾驶机构;包括机车控制模块,以及设置在机车头内部并与机车控制模块连接的gps模块、故障诊断模块、蓝牙遥控模块和到位识别模块;所述机车控制模块、gps模块和故障诊断模块均与监控室的监控中心连接,实现远程控制;所述蓝牙遥控模块与蓝牙遥控器进行通讯;所述远程监控机构;包括设置在监控室的控制中心,还包括设置在等待区的储备电源上的电池管理系统;所述无人驾驶机构中的gps模块和故障诊断模块均与所述控制中心连接受控,电池管理系统与控制中心连接受控。
6.所述牵引机车包括机车头和顺序设置在机车头后面的4
‑
6个铁水罐;每个铁水罐上配设有存储自身id信息的射频标签,高炉外侧设置射频标签读卡器,与所述射频标签相
配合。
7.所述等待区的储备电源包括太阳能充电接口和电网充电接口;所述行驶区的光伏发电板通过太阳能发电并将电能存储入储备电源;储备电源中设置有电池管理系统:当电源电压低于阈值,自动开启电网充电,高于阈值则用太阳能充电。
8.所述等待区的充电模式为动态充电装置,包括位置传感器s、充电线圈l和常闭开关。
9.等待区的储备电源为一个;等待区的充电过程为:以机车行驶方向为准,当传感器s1检测到机车,则第一常闭开关打开,充电线圈l1为机车充电,机车继续前行;当传感器s2检测到机车,第一常闭开关关闭,第二常闭开关打开,充电线圈l2为机车充电,一直延续到机车停止;整个动态充电过程中,必有一个常闭开关打开,充电线圈ln为机车充电直到高炉铁水装载结束,本轮充电结束;充电过程中机车的电池管理系统电池电量数据,并通过机车内部设置的无线发射模块发送给控制中心的上位机进行监控。
10.储备电源为多个,光伏发电板同时与多个储备电源连接,常闭开关由控制器控制;等待区的充电过程为:以机车行驶方向为准(图中箭头方向),当传感器s1检测到机车,第一常闭开关打开,充电线圈l1为机车充电,机车继续前行到l1和l2之间,常闭开关2打开,补偿线圈以与l1相反的方向为机车充电。档s1感应不到机车位置,车辆完全进入补偿线圈1,逆变电路切换电源2方向,机车由补偿线圈b1充电。当传感器s2和s3都可以检测到机车位置时,电源2再次切换方向为机车补偿能量,电源 3和常闭开关3打开为机车充电,直至机车行驶到传感器s2检测不到的位置,电源2管理,l2给机车充电,后面过程以此类推。
11.无人驾驶机构包括机车控制模块、路径规划模块、gps模块、故障报警模块、蓝牙遥控模块和无线发射接受模块;所述无人驾驶机构通过4g/5g无线发射和接收模块与远程监控机构进行无线通讯。
12.所述机车控制模块用于控制机车电机启停和运行方向;所述路径规划模块用于规划牵引机车的起止点,路径规划由工作人员在监控室完成,规划好的路径经无线发射模块发给牵引机车,机车无线接收模块接收到指令后按照规划路径行驶;所述gps模块用于机车定位,监控室工作人员随时观察机车位置;所述故障报警模块用于机车故障报警,机车出现故障后将故障代码通过无线发射模块发送至远程监控机构中的控制中心供工作人员做决策。
13.高炉出铁口下方设射频读卡器,读卡器将读取的射频标签信息反馈给控制中心,铁水罐信息显示非空则机车继续前行,此时机车触发的限位开关无效,直至铁水罐显示信息为空罐,机车触发最近的限位开关后停止运行并等待接收铁水。
14.与所述蓝牙遥控模块相匹配的蓝牙遥控器由炉前工保管,炉前工观察到铁水满罐则用蓝牙遥控器发出指令,蓝牙遥控模块接收指令后,机车控制模块将信号传送给控制中心,控制中心发送指令至牵引机车的机车控制模块,控制机车将铁水罐送至转炉车间。
15.与现有技术相比,本发明所能够实现的有益效果是:全智能无人操控蓄电式牵引机车运转系统,在钢厂从高炉向转炉转运铁水的过程中,在轨道上分别铺设光伏发电板和动态无线充电板,光伏发电板用于太阳能发电,充分利用清洁能源,动态无线充电板用于机车在等待区等待铁水过程中给机车充电;在机车能实现充电无人化的同时,利用机车的无
人驾驶模块和远程监控模块,实现蓄电式牵引机车的全智能无人驾驶模式。
16.本发明可以降低牵引机车的人力成本、降低机车中蓄电池的体积、降低机车制造成本、降低机车使用过程中的电能成本、减碳环保。
附图说明
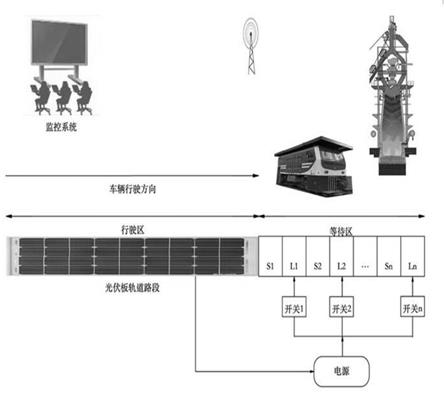
17.图1为本发明其中一个实施例的整体布局图。
18.图2为本发明中另一实施例的布局图。
具体实施方式
19.下面结合附图和实施例对本发明做进一步说明。
20.本发明所公开的是一种全智能无人操控蓄电式牵引机车运转系统,包括蓄电式的牵引机车、供牵引机车行进的轨道,还包括无人驾驶机构和远程监控机构。
21.轨道为智能轨道,包括裸露在外的行驶区和置于高炉外侧的室内等待区。行驶区的轨道上铺设有光伏发电板;等待区的轨道上铺设无线充电线圈。光伏发电板和无线充电线圈均与设置在等待区的储备电源连接。
22.作为一个优选的实施例,等待区的储备电源包括两种充电接口,即太阳能充电接口和电网充电接口。行驶区的光伏发电板通过太阳能发电并将电能存储入储备电源。储备电源还通过正常充电线与电网连接。储备电源中设置有电池管理系统:当电源电压低于阈值,自动开启电网充电,高于阈值则用太阳能充电。
23.作为一个优选的实施例,见图1,等待区的充电模式为动态充电装置,包括位置传感器s、充电线圈l和常闭开关。储备电源为一个,光伏发电板或电网均与该储备电源连接,一个电源为机车充电。
24.等待区的充电过程为:以机车行驶方向为准(图中箭头方向),当传感器s1检测到机车,则第一常闭开关打开,充电线圈l1为机车充电,机车继续前行;当传感器s2检测到机车,第一常闭开关关闭,第二常闭开关打开,充电线圈l2为机车充电,一直延续到机车停止;整个动态充电过程中,必有一个常闭开关打开,充电线圈ln为机车充电直到高炉铁水装载结束,本轮充电结束;充电过程中机车的电池管理系统电池电量数据,并通过机车内部设置的无线发射模块发送给控制中心的上位机进行监控。
25.作为另一个优选的实施例,见图2,储备电源为多个,光伏发电板同时给多个电源充电,之后多个电源为牵引机车充电,常闭开关由控制器控制。
26.等待区的充电过程为:以机车行驶方向为准(图中箭头方向),当传感器s1检测到机车,第一常闭开关打开,充电线圈l1为机车充电,机车继续前行到l1和l2之间,常闭开关2打开,补偿线圈以与l1相反的方向为机车充电。档s1感应不到机车位置,车辆完全进入补偿线圈1,逆变电路切换电源2方向,机车由补偿线圈b1充电。当传感器s2和s3都可以检测到机车位置时,电源2再次切换方向为机车补偿能量,电源 3和常闭开关3打开为机车充电,直至机车行驶到传感器s2检测不到的位置,电源2管理,l2给机车充电,后面过程以此类推。
27.本发明中的无人驾驶机构包括机车控制模块,以及设置在机车头内部并与机车控制模块连接的gps模块、故障诊断模块、到位识别模块和蓝牙遥控模块。控制模块、gps模块和故障诊断模块均与监控室的监控中心连接,实现远程控制。
28.作为一个优选的实施例,无人驾驶机构包括机车控制模块、路径规划模块、gps模块、故障报警模块。无人驾驶机构通过4g/5g无线发射和接收模块与远程监控机构进行无线通讯。机车控制模块用于控制机车电机启、停和运行方向。路径规划模块用于规划牵引机车的起止点,路径规划由工作人员在监控室完成,规划好的路径经无线发射模块发给牵引机车,机车无线接收模块接收到指令后按照规划路径行驶;gps模块用于机车定位,监控室工作人员随时观察机车位置;故障报警模块用于机车故障报警,机车出现故障后将故障代码通过无线发射模块发送至远程监控模块上位监控系统供工作人员做决策。
29.本发明中的远程监控机构包括设置在监控室的控制中心,还包括设置在等待区的储备电源上的电池管理系统。无人驾驶机构中的gps模块和故障诊断模块均与所述控制中心连接受控,电池管理系统与控制中心连接受控,实现对机车运维状况的监控。
30.牵引机车包括机车头和顺序设置在机车头后面的4
‑
6个铁水罐;每个铁水罐上配设有存储自身id信息的射频标签,高炉外侧设置射频标签扫描器,与所述射频标签相配合。高炉出铁口下方设射频读卡器,读卡器将读取的射频标签信息反馈给控制中心,铁水罐信息显示非空则机车继续前行,此时机车触发的限位开关无效,直至铁水罐显示信息为空罐,机车触发最近的限位开关后停止运行并等待接收铁水。
31.与蓝牙遥控模块相匹配的蓝牙遥控器由炉前工保管,炉前工观察到铁水满罐则用蓝牙遥控器发出指令,蓝牙遥控模块接收指令后,机车控制模块将信号传送给控制中心,控制中心发送指令至牵引机车的机车控制模块,控制机车将铁水罐送至转炉车间。
32.远程监控模块位于牵引机车运行现场的监控室,工作人员同时对多辆无人驾驶牵引机车进行监控。监控模块针对高炉出铁需求和转炉炼钢需求对多辆车进行路径规划,之后把规划好的路径数据分别发送给每一辆无人驾驶车辆,同时监控多辆牵引机车运行状态和电池电量数据。如果收到无人驾驶牵引机车故障报警则即时对机车故障进行诊断并对机车进行重新调度和路径规划。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1