基于减振波形的混合动力系统多工况主动减振控制方法
1.本发明属于新能源混合动力系统电子控制领域,特别提出基于减振波形的混合动力系统多工况主动减振控制方法。
背景技术:
2.混合动力系统通过利用发动机、电机和电池相互配合高效率运行实现节能减排。增程式混合动力系统是一种串联混合动力系统,采用发动机和电机构成的发电机组为电动汽车延长里程,是混合动力汽车向电动汽车过渡的一种有效形式。混合动力系统为了减少发动机工作时间,会利用与之相连的isg电机实现快速启停,而发动机频繁快速启停过程产生的扭转振动会对驾驶舒适性造成干扰,也可能致使机电耦合轴断轴,带来部件可靠性问题。
3.现有的减振技术主要采用安置被动式的扭转减振器的方法来降低混合动力系统中机电耦合轴上的扭转振动,然而被动式的扭转减振器的匹配具有一定难度,且扭转减振器不能自主调节减振区间,难以适应混合动力系统中的多频段减振的要求。
4.为此,近年来出现了通过控制电机实现抑制机电耦合轴上扭转振动的主动减振控制方法。但是,现有混合动力系统的主动减振技术主要面向于发动机的启停工况开展,对于其他多种运行工况条件下的减振未给出明确的减振方法。而其他工况确实存在振动与噪声过大影响舒适性的实际情况,典型工况例如:增程式混合动力系统为了尽可能让发动机
‑
发电机组一旦开启就工作在高速、高负荷的高效区运行,如果此时运行于车速较低的城市工况之下,驾驶员会感到明显的发动机
‑
发电机组高速运行的背景噪声和振动体验,降低了驾驶舒适性,同时机电耦合轴上的扭转振动同样会带来轴系安全性和可靠性问题,现有技术难以满足多个工况下的主动减振控制。
5.此外,现有混合动力系统的主动减振技术采用基于转矩传感器实时测量机电耦合轴上转矩或基于发动机缸压传感器实时估测机电耦合轴上转矩,再施加反向的主动减振转矩的方法都为系统增加了高昂的成本。
技术实现要素:
6.本发明的目的在于解决现有技术中存在的上述问题,并且能够保存现有技术所实现的优势,提供基于减振波形的混合动力系统多工况主动减振控制方法。本发明能够在多个混合动力系统的运行工况下,不需要额外安装缸压传感器和转矩传感器等测试装置,通过对不同工况的转矩波形进行估算,实时匹配不同工况波动转矩所对应的减振波形,工况切换时波形也随之切换,从而实现多个主要工况的减振需求,降低传动系统的扭转振动,提高不同工况下的驾驶舒适性和传动部件的安全可靠性。
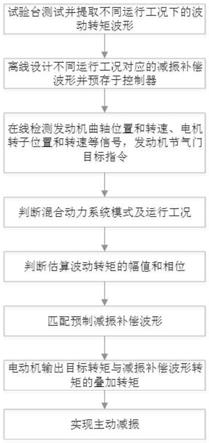
7.本发明提出基于减振波形的混合动力系统多工况主动减振控制方法,该方法包括以下步骤:
8.1)在试验台中测试混合动力系统不同运行状态下机电耦合轴上的波动转矩;
9.2)离线设计不同工况对应的减振补偿波形;
10.3)利用曲轴位置传感器和旋转变压器在线实时采集发动机曲轴和电机转子位置、转速等信号;
11.4)根据当前转速、曲轴和转子位置、发动机节气门目标指令、电机目标转矩,在线实时判断混合动力系统状态与工况点;
12.5)估算波动转矩的幅值和相位等特征信息;
13.6)匹配预制的减振补偿波形;
14.7)使电动机在目标转矩上叠加减振波形的转矩实现主动减振,随着工况变化实时切换减振波形。
15.优选的,所述减振补偿波形通过离线设计,对应于试验台测试混合动力系统的扭振特性而获得的波动转矩的频率和相位,不同工况对应于不同减振补偿波形。
16.优选的,所述实时采集的发动机曲轴位置和转速由曲轴位置传感器获取,电机转子位置和转速信号由旋转变压器获取。
17.优选的,所述在线实时判断混合动力系统状态与工况点的方法,基于当前发动机和电机转速、曲轴和转子位置、电机当前转矩、发动机节气门开度以及发动机目标转速和电机目标转矩的信号完成,该方法先根据当前发动机的转速和节气门开度、电机转速和转矩判断当前工况点,再根据发动机和电机前一时刻工况点和目标工况点判断当前工况处于过渡状态或稳定状态,然后判断当前工况下发动机曲轴和电机转子动态位置。
18.优选的,所述估算波动转矩根据当前发动机和电机具体运行状态和工况点不同而不同,利用整车控制器中寄存表格和查表法,根据当前发动机和电机的命令和传感器采集的状态,在线估算波动转矩的幅值、相位和频率。
19.优选的,所述匹配预制的减振补偿波形预存于混合动力系统整车控制器之中,不同工况有不同波形,根据当前估算的波动转矩而调取,该减振补偿波形为估算的波动转矩波形的反向波形,相位与估算的波动转矩相同。
20.优选的,所述叠加减振波形叠加于电动机目标转矩之上,利用电动机的快速响应特性平衡发动机和电机耦合的振动,该减振波形随着工况变化而实时切换。
21.本发明主动减振控制方法应用于具有发动机和电机具有刚性连接的串联式混合动力系统的增程器之上,也可以用于发动机和电机同轴连接的并联式混合动力机电耦合系统,同样可用于发动机、多个电机和变速箱相互连接的混联式混合动力机电耦合系统,利用电机主动降低发动机与电机连接轴上的转矩波动。
22.本发明试验台是基于混合动力机电耦合系统的台架试验进行测试,包括待测试特性的混合动力系统,转矩传感器、曲轴位置传感器和旋转变压器在内的信号采集装置,信号采集与记录仪在内的数据记录装置,以及测功机等测试设备。通过试验台测试不同工况下混合动力机电耦合系统中轴上的转矩波动的幅值、相位和频率,包括发动机启动工况、发动机停机工况和若干典型发动机
‑
发电机组高效发电工况,与工况对应记录不同工况下波动转矩的具体形态。
23.本发明所述的离线设计的不同减振波形基于如下表达式进行计算求取:
[0024][0025]
式中,为主动减振的补偿转矩,为波动转矩,为目标工况的电机转矩,即平均转矩,为转矩传感器采集的机电耦合轴上的转矩,为曲轴转角。
[0026]
补偿转矩与波动转矩的相位和频率完全相同,幅值绝对值相等方向相反。
[0027]
本发明所述采用曲轴位置传感器测量发动机的曲轴的在线实时位置和发动机转速,利用旋转变压器在线实时采集与发动机刚性链接的电机转子的位置和电机转速信号。
[0028]
本发明所述在线实时判断混合动力系统状态与工况点由传感器采集的信号和目标指令综合判断,例如根据控制器发送的启动命令和当前发动机、启动电机的转速判断发动机所处的启动过程的阶段,并确定启动阶段中的转速和发动机曲轴、电机转子的相位。
[0029]
本发明所述估算波动转矩的幅值和相位等特征信息在线进行,为了保障高频控制的实时性,波动转矩的估算根据查表法获取,根据发动机和电机当前工作状态、电机的目标指令、发动机转速和曲轴位置查取当前试验测得的当前工况下的波动转矩。
[0030]
本发明所述匹配预制的减振补偿波形同样为了保证采用查表法获取,由波动转矩的幅值、相位和频率查取对应的预制的减振补偿波形。
[0031]
本发明所述在电动机目标转矩上叠加减振波形时需要减振波形幅值和相位与当前工况下波动转矩所对应,随着工况改变而实时切换对应动态或稳态工况的补偿转矩,以适应不同工况的减振需求。
[0032]
本发明的特点及有益效果在于:
[0033]
1、本发明的主动减振控制扩展到多个运行工况,包括稳态和动态运行工况之上,能够实现混合动力机电耦合系统在多个工况的减振降噪,尤其是对于串联式增程式混合动力系统启动工况和低速高负荷工况运行的减振效果,提高了驾驶舒适性和部件安全可靠性。
[0034]
2、本发明中波动转矩的估算不采用复杂的计算方法,利用试验台测试的转矩波动特性形成的表格进行查取,算法简单易行,保障了主动减振高频控制的实时性。
[0035]
3、本发明不需要对已有混合动力系统进行改造,也不需要额外加装价格高昂的如转矩传感器或发动机缸压传感器等,具有更加简单可靠的结构形式和更低的系统成本。
附图说明
[0036]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0037]
图1为本发明的整体流程图;
[0038]
图2为本发明实施方式中的混合动力系统结构图;
[0039]
图3为本发明测试波动转矩的试验台示意图;
[0040]
图4为本发明实施方式中混合动力发动机常用工作点示意图;
[0041]
图5为本发明实施方式中启动工况中波动转矩和减振补偿转矩示意图;
[0042]
图6为本发明实施方式中启动工况中减振前后转速变化示意图;
[0043]
图7为本发明实施方式中发电工况中波动转矩和减振补偿转矩示意图;
[0044]
图8为本发明实施方式中发电工况中减振前后转速变化示意图。
具体实施方式
[0045]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。因此,在此公开的具体结构和功能细节不应被解释为限制,而应作为向本领域技术人员展示以多种形式利用本公开的实施例的代表和说明性的基础文件。
[0046]
实施例:
[0047]
现参照图1—图5所示,说明本发明提出的基于减振波形的混合动力系统多工况主动减振控制方法的具体实施方式,该方法示例所实施的平台如图2所示,为串联式混合动力汽车动力系统平台,具有以发动机和isg电机构成的增程器,本示例主动减振控制主要在该发动机
‑
isg电机构成的增程器上使用,该控制方法包括以下步骤:
[0048]
1)首先在如图3所示试验台中测试图2所示混合动力系统中关键混合动力机电耦合系统,即发动机
‑
isg电机系统在不同运行状态下机电耦合轴上的波动转矩。利用曲轴位置传感器测量发动机转速和曲轴的实时位置,利用旋转变压器采集并记录isg电机转子的旋转角度和速度,与此同时利用在发动机
‑
isg电机连接轴上加装的转矩传感器测试机电耦合轴上的转矩大小和波动形态。利用整车控制器与数据采集仪通过can总线链接,采集记录整车控制器发动机控制器、isg电机控制器,工控机给整车控制器发送运行状态指令,再由整车控制器发送给发动机控制器和isg电机控制器。通过工控机设定的发动机启动、停机、怠速以及若干发动机
‑
isg电机高效发电工况点发送给整车控制器,再由整车控制器发送发动机或电机的控制命令、目标转速和转矩发送给发动机和isg电机控制器,控制发动机和isg电机运行。在运行中实时记录设定发动机工作状态、目标转速、当前转速、当前节气门和曲轴位置,以及isg电机目标转矩、当前转矩和转子位置所对应的机电耦合轴上的转矩值的幅值和方向,形成以下列方程为表达式的表格:
[0049][0050]
式中,t
test
转矩传感器采集的机电耦合轴上的转矩,s
e
和s
m
分别为发动机和电机状态,α
e
为发动机节气门开度,n
e
为发动机转速,为发动机目标转速,为发动机曲轴转角,φ为转子位置,t
m
为电机当前转矩,为电机目标转矩。
[0051]
上述函数表示的表格中国,s
e
为发动机启动、点火、怠速或带载运行状态,s
m
为电机作为发电机或是电动机的状态。由状态确定后,记录启动、停机、怠速和若干典型高效区之下,α
e
、n
e
、φ、t
m
和所对应的轴上的波动转矩波形。
[0052]
2)其次,离线设计不同工况对应的减振补偿波形,补偿转矩与波动转矩的相位和
频率完全相同,幅值绝对值相等方向相反,主要以发动机曲轴位置转角的高频变化量为变量进行设计,不同减振波形基于如下表达式进行计算求取:
[0053][0054]
式中,为主动减振的补偿转矩,为波动转矩,为目标工况的电机转矩,即平均转矩,为转矩传感器采集的机电耦合轴上的转矩,为曲轴转角。
[0055]
3)在如图2所示的应用车辆中,利用曲轴位置传感器和旋转变压器在线实时采集发动机曲轴和电机转子位置、转速等信号,并实时记录发动机的节气门开度和电机目标转矩指令。
[0056]
4)在如图2所示的应用车辆中,将预制的不同工况对应的减振波形存储与整车控制器的寄存器之中,根据当前转速、曲轴和转子位置、发动机节气门目标指令、电机目标转矩,在线实时判断混合动力系统状态与工况点。
[0057]
5)在线应用中,取消转矩传感器,利用整车控制器中寄存表格和查表法,根据当前发动机和电机的命令和传感器采集的状态,在线估算波动转矩的幅值、相位和频率。
[0058]
6)根据在整车控制器中预存的,由第2)步预制的减振补偿波形,将减振波形相位与波动转矩相位相对应、幅值和频率相等、方向相反的减振转矩匹配当前工况下对应的波动转矩。
[0059]
7)将减振波形在线应用,使电动机在目标转矩上叠加减振波形的转矩实现主动减振,随着工况变化实时切换减振波形,降低机电耦合轴上的转矩波动。
[0060]
图4为本发明实施方式中混合动力发动机常用工作点示意图,常用工作点包括a点发动机停机工况,b点为发动机怠速工况,从a点到b点为isg电机拖动发动机启动工况,c点、d点和e点为根据发动机最低油耗和isg电机最高效率标定的增程器最优效率发电工况工作点,三个工况点为常用工况,三者发电功率不同,为减轻到台架试验中的测试工作量,选取常用的、有限的工作点进行波动转矩提取,并将相应的减振转矩波形存储进入整车控制器。
[0061]
图5为本发明实施方式中启动工况中从a点到b点过渡以及b点怠速工况下发动机波动转矩和电机减振补偿转矩示意图。图6为本发明实施方式中启动工况中减振前后转速变化示意图。图7为本发明实施方式中发电工况中c点工况下波动转矩和减振补偿转矩示意图,图8为本发明实施方式中发电工况中c点工况下减振前后转速变化示意图。d点和e点工况下的转矩波动、补偿转矩及减振效果示意可参照c点发电工况下的效果。
[0062]
当实际混合动力系统运行时,通过实施检测并匹配适当的减振波形,可以将减振扩展与本系统的常用典型工况上,为了降低振动波形的试验与减振波形的数量、难度和复杂度,在实际系统中,可以只选择常用典型工况进行减振。
[0063]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0064]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1