窄道通行辅助系统及方法与流程
本发明涉及车辆定位,尤其涉及窄道通行辅助系统及方法。
背景技术:
1、随着汽车技术的发展,辅助驾驶技术在车辆上的应用越来越广泛。但是,目前的辅助驾驶技术大多着眼于正常道路上的行驶——如自适应巡航控制、车道偏离预警、碰撞预警等——以及自动泊车。然而,对于驾驶员来说,尤其是新手来说,在狭窄道路上行驶是他们更为担心的情况。毕竟,在正常路况下,完全可以通过保持驾驶员自身的注意力来实现自适应巡航、车道偏离以及碰撞预警等辅助驾驶技术所能达到的状态,但是在狭窄道路上,受到驾驶经验不足、视野不足、道路狭窄等限制,即使注意力高度集中,也难免会出现剐蹭。
2、狭窄道路的典型情况包括限宽道路、小区道路、单行道以及存在大量违章停放的车辆的道路。在这些道路上,道路的两侧或任一侧具有障碍物,导致驾驶员常常难以判断车辆是否能通过这种道路,并且障碍物有时并不整齐,在本来就狭窄的道路上行驶时还需要不断调整车辆行驶轨迹。因此,在这种道路上行驶时存在一定的安全隐患。
技术实现思路
1、本发明是为了解决上述问题而完成的,其目的在于提供一种窄道通行辅助系统及方法,用于在具有限宽障碍物的狭窄道路上,判断车辆能否通过该狭窄道路并对驾驶员进行提醒,并且在能通过该狭窄道路的情况下,自动辅助驾驶员完成通行。
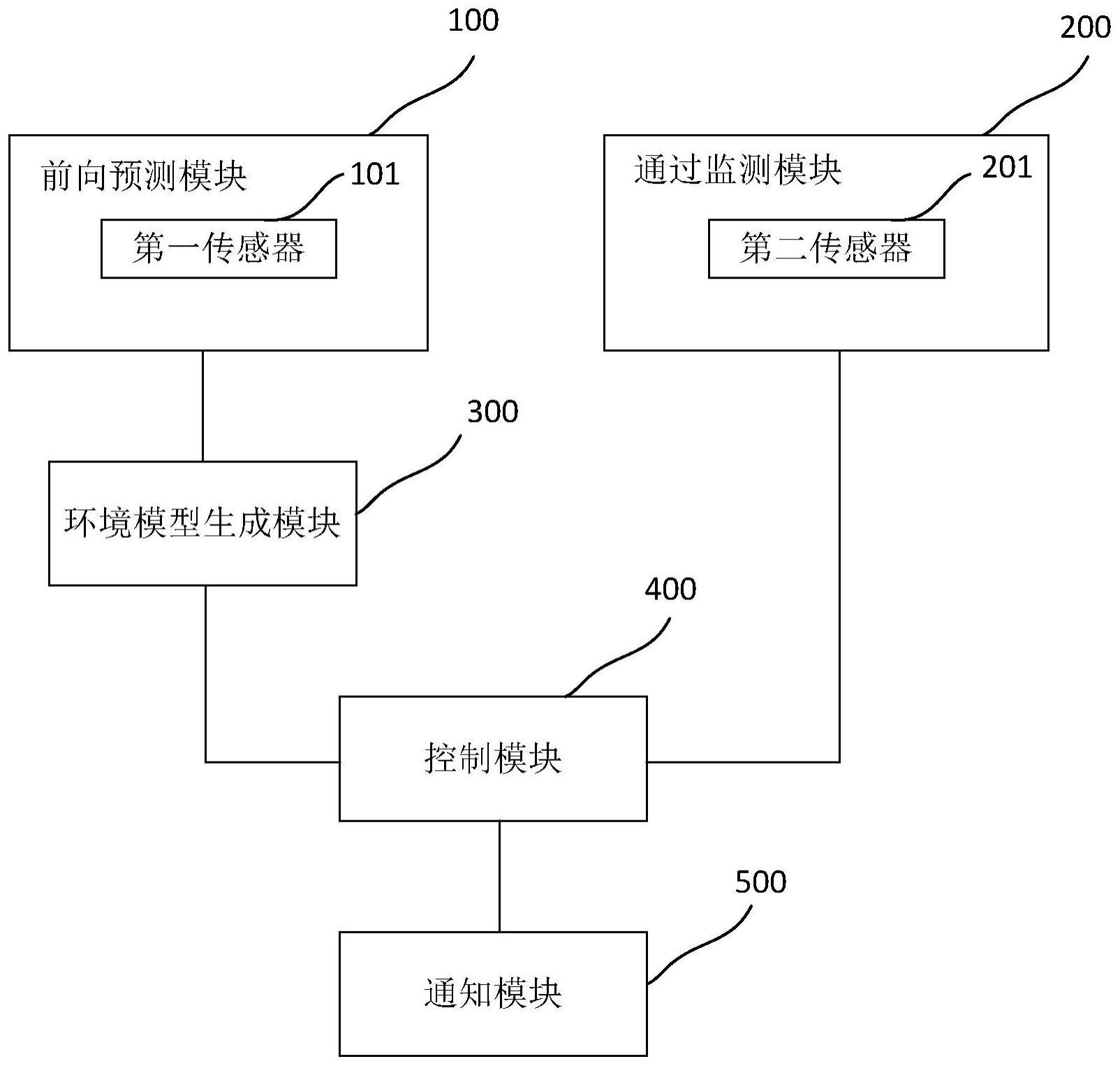
2、根据本发明的一个方面,提供一种窄道通行辅助系统,包括:前向预测模块,该前向预测模块包括安装成在车辆中向前定向的第一传感器,其利用该第一传感器来检测前方的窄道的可通行宽度,并基于该可通行宽度以及所述车辆的宽度信息来判断所述车辆能否通过该窄道;环境模型生成模块,在所述前向预测模块判断为所述车辆能通过所述窄道的情况下,该环境模型生成模块基于所述第一传感器获取到的信息生成窄道的环境模型以及获取所述车辆的当前位置;以及控制模块,所述控制模块利用所述环境模型以及所述车辆的当前位置,在所述环境模型中对所述车辆进行定位,并基于所述环境模型以及所述车辆的定位信息控制所述车辆驶入所述窄道。
3、优选地,该窄道通行辅助系统还包括:通过监测模块,该通过监测模块包括安装于所述车辆两侧的第二传感器,在所述车辆已局部通过或已进入所述窄道后,利用所述第二传感器实时地监测所述车辆与周围的障碍物的距离,在所述车辆已局部通过或已进入所述窄道后,所述控制模块根据所述通过监测模块获得的所述距离在所述环境模型中实时地对所述车辆进行定位,并基于所述环境模型以及所述车辆的定位信息控制所述车辆通过所述窄道。
4、优选地,该窄道通行辅助系统还包括:通知模块,该通知模块包括显示器和/或扬声器,从而通过图像和/或声音通知驾驶员能否通过该窄道以及通知驾驶员将进行窄道通行辅助。
5、优选地,所述前向预测模块中,当所述窄道的可通行宽度与所述车辆的宽度的差值大于等于预定阈值时,判断为所述车辆能通过所述窄道。
6、优选地,所述前向预测模块中,当所述窄道的可通行宽度与所述车辆的宽度的比值大于等于预定比率时,判断为所述车辆能通过所述窄道。
7、优选地,所述第一传感器包括激光雷达传感器。
8、优选地,所述第二传感器包括摄像头、雷达传感器以及超声波传感器。
9、优选地,所述第二传感器安装于所述车辆的外后视镜。
10、根据本发明的另一个方面,提供一种窄道通行辅助方法,包括如下步骤:前向预测步骤,利用安装成在车辆中向前定向的第一传感器来检测前方的窄道的可通行宽度,并基于该可通行宽度以及车辆的宽度信息来判断所述车辆能否通过该窄道;环境模型生成步骤,在所述前向预测步骤中判断为所述车辆能通过所述窄道的情况下,基于所述第一传感器获取到的信息生成窄道的环境模型以及获取所述车辆的当前位置;以及窄道驶入步骤,利用所述环境模型以及所述车辆的当前位置在所述环境模型中对所述车辆进行定位,并基于所述环境模型以及所述车辆的定位信息控制所述车辆驶入所述窄道。
11、优选地,该窄道通行辅助方法还包括:通过监测步骤,在所述车辆已局部通过或已进入所述窄道后,利用安装于所述车辆两侧的第二传感器实时地监测所述车辆与周围的障碍物的距离,窄道通过步骤,根据所述通过监测步骤获得的所述距离在所述环境模型中实时地对所述车辆进行定位,并基于所述环境模型以及所述车辆的定位信息控制所述车辆通过所述窄道。
12、优选地,该窄道通行辅助方法还包括:通知步骤,通过图像和/或声音通知驾驶员能否通过该窄道以及通知驾驶员将进行窄道通行辅助。
13、根据本发明,可以确认车辆能否进入特定窄道,由此防止可能在窄道上发生的汽车事故,此外,当确认车辆能够进入道路时,能进行窄道通行辅助,控制车辆驶入窄道,并且在车辆已局部通过或已进入窄道后,实时地监测车辆与周围的障碍物的距离,并基于此控制车辆顺利通过该窄道。因此,本发明能提升特殊场景——窄道的驾驶安全性。
技术特征:
1.一种窄道通行辅助系统,其特征在于,包括:
2.如权利要求1所述的窄道通行辅助系统,其特征在于,
3.如权利要求1或2所述的窄道通行辅助系统,其特征在于,
4.如权利要求1或2所述的窄道通行辅助系统,其特征在于,
5.如权利要求1或2所述的窄道通行辅助系统,其特征在于,
6.如权利要求1或2所述的窄道通行辅助系统,其特征在于,
7.如权利要求2所述的窄道通行辅助系统,其特征在于,
8.如权利要求2所述的窄道通行辅助系统,其特征在于,
9.一种窄道通行辅助方法,其特征在于,包括如下步骤:
10.如权利要求9所述的窄道通行辅助方法,其特征在于,
11.如权利要求9或10所述的窄道通行辅助方法,其特征在于,
技术总结
本发明提供一种窄道通行辅助系统及窄道通行辅助方法,该窄道通行辅助系统包括:包括安装成在车辆中向前定向的第一传感器,其利用该第一传感器来检测前方的窄道的可通行宽度,并基于该可通行宽度以及车辆的宽度信息来判断车辆能否通过该窄道的前向预测模块;在前向预测模块判断为车辆能通过窄道的情况下,基于第一传感器获取到的信息生成窄道的环境模型以及获取车辆的当前位置的环境模型生成模块;以及利用环境模型以及车辆的当前位置,在环境模型中对车辆进行定位,并基于环境模型以及车辆的定位信息控制车辆驶入窄道的控制模块。通过本发明的窄道通行辅助系统及方法能提升特殊场景——窄道的驾驶安全性。
技术研发人员:付志博
受保护的技术使用者:大陆泰密克汽车系统(上海)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!