用于车辆、特别是用于至少一个轨道车辆的机电制动致动器以及制动系统的制作方法
本发明总体上属于制动系统领域;具体地,本发明涉及一种用于车辆,特别是用于至少一种轨道车辆的机电制动致动器和制动系统。
背景技术:
1、在以下描述中,根据2020年4月1日可用的最新版本,将参考以下欧洲标准:
2、-en50126【“铁路应用-可靠性、可用性、可维护性和安全性(rams)的规范和论证”】
3、-en50128【“铁路应用-通信、信号和处理系统-铁路控制和保护系统软件”】;
4、-en50129【“铁路应用-通信、信号和处理系统-信号用安全相关电子系统”】。
5、-en50159【“铁路应用-通信、信号和处理系统-传输系统中的安全相关通信”】。
6、特别地,en50126标准定义了根据安全分析的结果,将安全等级sil0/1/2/3/4(安全等级sil4表示最大安全等级)分配给组成有关系统的子系统的方法,en50128和en50129标准定义了根据上述安全分析结果分配的sil等级,分别应用于软件和硬件组件的设计标准。
7、从现有技术可知:
8、-根据欧洲标准en50126执行的与紧急制动功能相关的安全计算,系统地将安全完整性等级(safety integrity level,sil)sil≥3分配给所述紧急制动功能,并因此通常将安全完整性等级sil≥3分配给实现紧急制动功能的子系统;
9、-根据欧洲标准en50126执行的与行车制动功能相关的安全计算,通常将安全完整性等级sil≤2分配给所述行车制动功能,并因此通常将安全完整性等级sil≤2分配给实现行车制动功能的子系统;
10、基于en50128和en50129,与根据安全完整性等级sil≤2的设计相比,根据安全完整性等级sil≥3的控制单元(通常为基于微处理器或基于fpga的控制单元)的开发所涉及的设计、验证和认证成本高大约一个数量级。
11、关于前面的最后一点,很明显,将根据sil≥3安全等级开发的功能保持极其有限和简单是值得的。
12、图1示出了根据目前工艺水平技术的气动制动致动器100。机械组件101是本领域技术人员已知的松弛调节器。
13、随着制动的连续进行,制动片和制动盘会随着时间不断磨损。因此,制动执行器的空转行程将随时间增加,从而增加应用制动时的延迟。
14、松紧调节器的目的是在非制动状态下,当制动片和制动盘的厚度由于制动引起的磨损而持续减小时,在制动片的制动表面和制动盘表面之间保持恒定的静止距离。通过这种方式,由于杆的空转行程而导致的制动应用延迟随时间保持恒定,从而允许精确计算车辆或火车的制动时间或停车距离,特别是在紧急制动的情况下。
15、本领域技术人员熟知的是,制动致动器杆在杆和制动缸之间的连接点处的空转行程定义为“尺寸a”,以下称为距离“a”。
16、纯粹作为参考,尺寸a在盘式致动器的情况下,其典型值为2mm,在轮式致动器的情况下,其典型值为6mm。
17、在蹄式制动装置的情况下,采用相同的制动蹄和车轮磨损调节机构。
18、机械组件101的功能复杂性,以及由此产生的装配和测试的复杂性,还有最终的成本,都是显而易见的。
19、不利的是,在已知的制动致动器中,重置初始距离a的程序是在每次更换制动力施加装置217的摩擦装置时由负责更换摩擦装置的操作人员手动进行的,并且需要特别注意和工具。
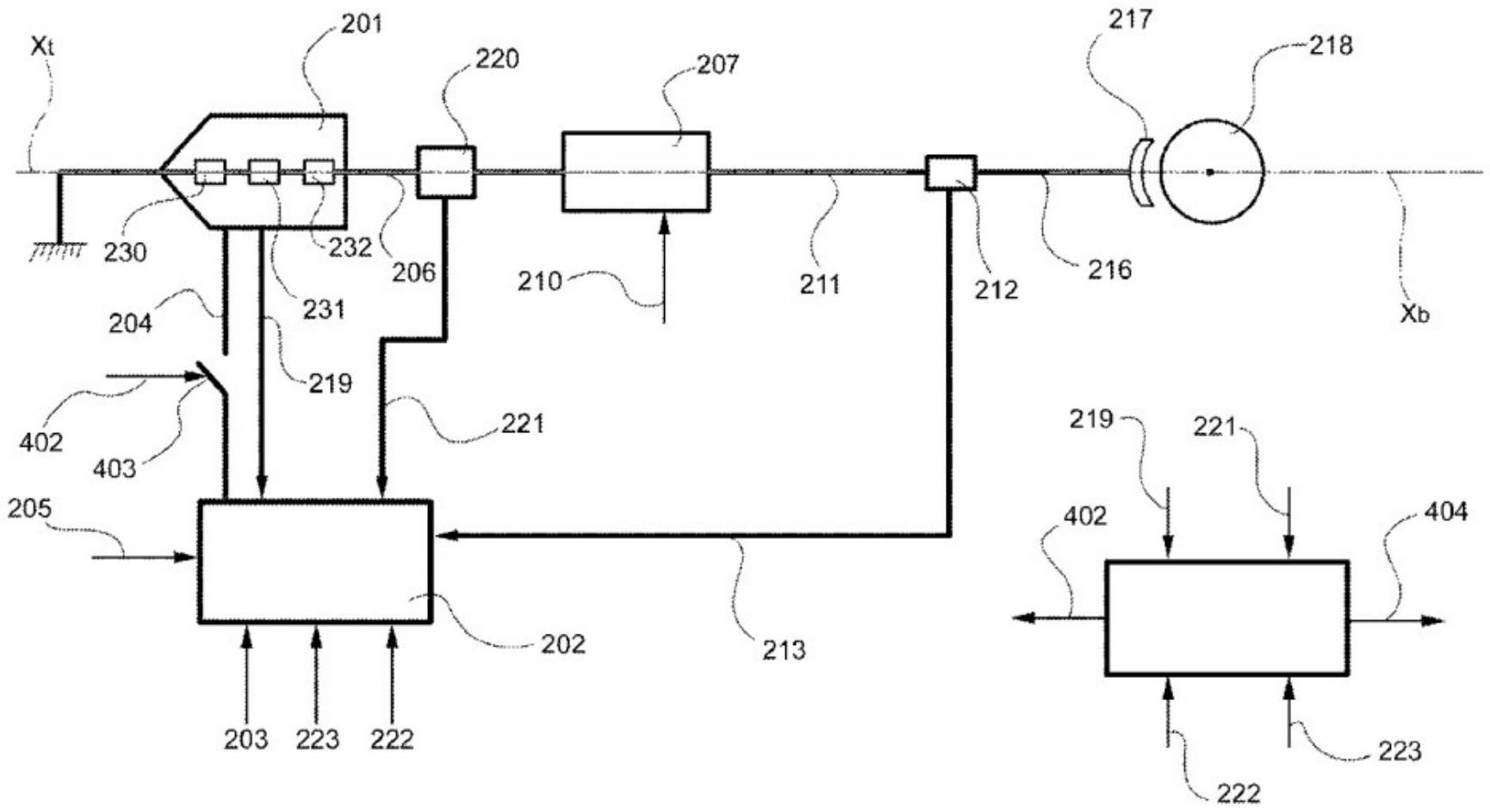
20、图2说明了根据现有技术的机电制动致动器200的功能框图。
21、机电模块201包括至少一个电机和可能的减速器,即扭矩倍增器,并且可以伸出或缩回的与紧急制动模块207相连的力传递构件(即臂206)。
22、紧急制动模块207包括紧急制动能量存储装置208,例如机械势能或动能的机械存储元件。
23、本质上,紧急制动模块207由电信号210控制,并且被设置为能够呈现第一状态,在该第一状态下,当紧急制动请求信号210不指示需要紧急制动请求时,紧急制动组件207不释放存储的能量以执行紧急制动。此外,由电信号210控制的紧急制动模块207被设置为能够呈现第二状态,在该第二状态下,当紧急制动请求信号210指示存在紧急制动请求并且因此需要执行紧急制动时,紧急制动组件207释放所存储的能量以执行紧急制动。
24、考虑到本发明的目的,不需要对所述紧急制动模块207的操作进行更详细的描述。
25、另一个力传递构件(即,臂211)连接到力传感器装置212,力传感器装置被设置为产生制动力指示电信号213,该电信号的值指示施加在力传递构件211和另一个力传递构件(即臂216)之间的机械力。
26、制动力指示电信号213被输入到行车制动控制单元202。
27、臂216连接到力传感器装置212和制动力施加装置217。
28、制动力施加装置217例如通过调用车轮上具有制动蹄的制动装置/致动器来图示;然而,制动力施加装置217可以例如采取其他形式,例如在制动盘上具有制动片的杠杆制动装置/致动器。
29、行车制动控制单元202本质上是电子的,可以在其输入端接收电源信号205,该信号传递电源电压,不完全源自车辆的电池。
30、行车制动控制单元202被设置为来调节电源电压,以通过至少一个电制动力控制信号204控制机电模块201中包括的电机。
31、行车制动控制单元202接收至少一个角位置信号219作为输入,该角位置信号不完全指示机电模块201内存在的旋转构件的角位置和旋转方向。
32、在可能的非排他性实施例中,至少一个角位置信号219包括由属于bldc型电机的霍尔传感器产生的角位置信号。
33、通过由行车制动控制单元202执行的计数和积分方法,行车制动控制装置202连续地获得臂206随时间的瞬时伸长值,即制动力施加装置217的位置。
34、在另一个可能的实施例中,位置传感器装置220(例如,位置传感器)通过电位置信号221(即指示制动力施加装置217的位置)向行车制动控制单元202随时间连续读取指示其瞬时伸长值的手臂206的平移位置。
35、图3所示的图示出了臂206的位置p和由制动力施加装置217施加的力f之间的关系。
36、假设臂206的初始位置对应于横坐标值p=-a,即对应于与距离a相对应的静止位置,所施加的力f对于臂206所覆盖的整个距离具有零值,从横坐标值-a和值0,对应于制动力施加装置217和制动力接收装置(耗散装置)之间的初始接触点,即,在盘式制动器的情况下是制动盘,或者在轮式制动器的情况下是车轮。
37、正位置值p对应于由制动力施加装置217施加的正力值f。
38、e段的角系数表示制动力施加装置217的弹性。弹性越大,角系数越小。现在假设致动器已经施加了对应于位置p’的制动力f’,在请求取消制动力时,行车制动控制单元202命令机电模块201以预定速度缩回臂206。
39、同时,行车制动控制单元202通过位置信号221接收臂206的位置值,即,通过至少一个角位置信号219对机电模块201的旋转构件的转数进行计数和积分。当指示施加的力值f的制动力指示电信号213达到零值时,行车制动控制单元202继续命令机电模块201缩回臂206,直到到达位置-a。
40、这样,制动蹄和车轮所承受的磨损在每次制动时得到补偿。
41、通过上述方法恢复的尺寸分辨率对应于臂位置206的测量分辨率。
42、所描述的解决方案有利地消除了称为松弛调节器的复杂机械组件101,每次释放行车制动器时由行车制动控制单元202执行简单的软件程序。
43、欧洲专利ep3346155中要求保护一种类似于迄今为止所描述的现有技术的方法。
44、现有技术中,行车制动控制单元202通常根据安全等级sil<=2(关于标准en50128和en50129)来开发。
45、在这种情况下,控制恢复距离a的软件功能的故障可能以sil安全等级<=2的特定概率发生。
46、由于列车上所有制动执行器上的软件都相同,因此必须将该软件视为共模故障源,即整个列车上的故障可能同时发生。
47、控制距离a调节的软件功能的故障可能表现为未能在图3中的图中的点-a处停止,继续将臂206缩回到维护位置-b(行程结束位置),对应于维护制动力施加装置217所需的位置。例如,制动力施加装置217的维护可能需要更换所述制动力施加机构217的摩擦装置。
48、位置-b可以是几十毫米,这比位置-a大一个数量级。
49、在这种情况下,制动应用延迟可能达到几秒的值。
50、如果在整个列车以共模出现软件故障后请求紧急制动,区域列车的典型速度为160km/h,则每延迟一秒,停车距离将延长约44m。
51、这种考虑导致了控制恢复距离a的软件功能和执行该功能的硬件必须发展到与紧急制动相同的安全等级,也就是说,根据en50128和en50129标准,行车制动控制单元202必须完全发展到sil等级>=3。
52、不利的是,这一要求对行车制动控制单元的开发和生产成本有很大影响,在符合安全等级sil<=2的当前解决方案中,行车制动控制装置已经非常复杂。
技术实现思路
1、因此,本发明的一个目的是提供一种用于车辆,特别是用于至少一种铁路车辆的机电制动致动器,其可以防止制动力施加装置在维护位置中的不当操作。
2、因此,本发明的另一个目的是提供一种用于车辆、特别是用于至少一种铁路车辆的机电制动致动器,该机电制动致动器通过软件解决方案以低成本实现,同时保持与最先进的紧急制动兼容的所有安全要求,在一些实施例中,机电制动致动器能够恢复距离a,即制动蹄和车轮或制动片和制动盘的消耗。
3、本发明的另一个目的是提供一种机电制动致动器,其具有用于安全维护制动力施加装置的程序。
4、根据本发明的一个方面,通过一种用于车辆,特别是用于至少一种铁路车辆的机电制动致动器,该机电制动致动器具有权利要求1中限定的特征;通过用于车辆,特别是用于至少一种铁路车辆的机电制动致动器,该机电制动致动器具有权利要求9中限定的特征;以及通过具有权利要求25中限定的特征的制动系统,实现了上述和其他目的和优点。
5、本发明的优选实施例在从属权利要求中定义,其内容应被理解为本说明的组成部分。
- 还没有人留言评论。精彩留言会获得点赞!