一种车辆控制结构的制作方法
1.本发明涉及电子电器技术领域,特别涉及一种车辆控制结构。
背景技术:
2.汽车行业历经百年发展,已经从传统的以机械结构为主构成的交通工具变成现代的以电子电气系统为主构成的第三智能移动空间。在电动汽车智能化飞速发展,自动驾驶水平蒸蒸日上的今天,汽车的安全性和可靠性依然是最不可忽视的一点。目前的电子电气构架均以分布式为主,使用了部分域控制器,还有些版本使用了多个域控制器,一旦域控制器与网关之间的通信发生故障,将影响整个域控制器下的车辆集成单元器的通信。因此,现有的车辆控制结构无法在满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
技术实现要素:
3.本发明实施例提供一种车辆控制结构,用以解决现有技术中车辆控制结构无法在满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性的问题。
4.为了解决上述技术问题,本发明采用如下技术方案:
5.本发明实施例提供了一种车辆控制结构,包括:
6.至少两个整车集成单元、整车数据中心、自动驾驶数据中心以及座舱数据中心;
7.所述至少两个整车集成单元之间呈环状连接;
8.所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接。
9.进一步地,每个所述车辆集成单元之间通过千兆以太网连接;
10.所述至少两个整车集成单元,包括:
11.第一车辆集成单元、第二车辆集成单元、第三车辆集成单元以及第四车辆集成单元。
12.进一步地,所述至少两个整车集成单元之间呈环状连接,包括:
13.所述第一车辆集成单元的第一端与所述第二车辆集成单元的第一端连接,所述第二车辆集成单元的第二端与所述第三车辆集成单元的第一端连接,所述第三车辆集成单元的第二端与所述第四车辆集成单元的第一端连接,所述第四车辆集成单元的第二端与所述第一车辆集成单元的第二端连接。
14.进一步地,所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接,包括:
15.所述整车数据中心与所述第一车辆集成单元以及所述第三车辆集成单元之间通过千兆以太网连接;
16.所述自动驾驶数据中心与所述第一车辆集成单元通过千兆以太网连接;
17.所述座舱数据中心与所述第一车辆集成单元通过千兆以太网连接。
18.进一步地,所述座舱数据中心通过灵活数据速率的控制器局域网与所述车辆的车身域总线连接。
19.进一步地,所述车辆的蓄电池与至少一个所述整车集成单元通过电池管理器连接;
20.且在与所述蓄电池连接的整车集成单元与所述蓄电池之间设置有智能短路器。
21.进一步地,所述自动驾驶数据中心通过灵活数据速率的控制器局域网与所述车辆的制动总线连接。
22.进一步地,所述整车数据中心通过控制器局域网与所述车辆的底盘域总线连接。
23.进一步地,所述座舱数据中心通过控制器局域网与所述车辆的信息娱乐域总线连接。
24.进一步地,所述自动驾驶数据中心通过控制器局域网与所述车辆的防撞预警系统连接。
25.本发明的有益效果是:
26.本发明实施例的车辆控制结构,通过数据计算中心加整车集成单元的物理构架,整车集成单元之间采用环状网络的形式,且数据计算中心与整车集成单元之间双路连接,实现通信冗余以及为面向服务的通信结构的设计提供物理支持。本发明实施例的车辆控制结构,在保证车辆能够满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
附图说明
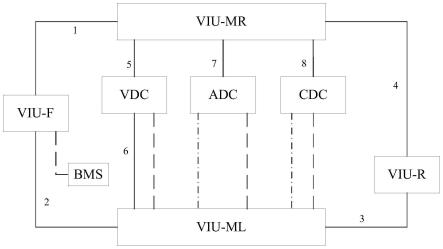
27.图1表示本发明实施例的车辆控制结构的结构示意图。
具体实施方式
28.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。在下面的描述中,提供诸如具体的配置和组件的特定细节仅仅是为了帮助全面理解本发明的实施例。因此,本领域技术人员应该清楚,可以对这里描述的实施例进行各种改变和修改而不脱离本发明的范围和精神。另外,为了清楚和简洁,省略了对已知功能和构造的描述。
29.应理解,说明书通篇中提到的“一个实施例”或“一实施例”意味着与实施例有关的特定特征、结构或特性包括在本发明的至少一个实施例中。因此,在整个说明书各处出现的“在一个实施例中”或“在一实施例中”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。
30.本发明针对现有技术中车辆控制结构无法在满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性的问题,提供一种车辆控制结构。
31.本发明实施例提供了一种车辆控制结构,包括:
32.至少两个整车集成单元(vehicle integrated unit,viu)、整车数据中心(vehicle data center,vdc)、自动驾驶数据中心(automous data center,adc)以及座舱数据中心(cockpit data center,cdc);
33.所述至少两个整车集成单元之间呈环状连接;
34.所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接。
35.本发明实施例的车辆控制结构,通过将整车集成单元进行环状网络俩连接,对各个整车集成单元进行了通信冗余的设计,在其中两个整车集成单元之间的通信异常后,两个整车集成单元之间的通信数据可以通过环形网络达到。所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接,保证了在数据计算中心与数据计算中心之间的通信异常后,通过冗余的通信通道进行通信。
36.本发明实施例的车辆控制结构,通过数据计算中心加整车集成单元的物理构架,整车集成单元之间采用环状网络的形式,且数据计算中心与整车集成单元之间双路连接,实现通信冗余以及为面向服务的通信结构的设计提供物理支持。本发明实施例的车辆控制结构,在保证车辆能够满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
37.如图1所示,每个所述车辆集成单元之间通过千兆以太网连接;
38.所述至少两个整车集成单元,包括:
39.第一车辆集成单元viu-mr、第二车辆集成单元viu-f、第三车辆集成单元viu-ml以及第四车辆集成单元viu-r。
40.可选地,所述至少两个整车集成单元之间呈环状连接,包括:
41.所述第一车辆集成单元viu-mr的第一端与所述第二车辆集成单元viu-f的第一端通过第一千兆以太网1连接,所述第二车辆集成单元viu-f的第二端与所述第三车辆集成单元viu-ml的第一端通过第二千兆以太网2连接,所述第三车辆集成单元viu-ml的第二端与所述第四车辆集成单元viu-r的第一端通过第三千兆以太网3连接,所述第四车辆集成单元viu-r的第二端与所述第一车辆集成单元viu-mr的第二端通过第四千兆以太网4连接。
42.本发明一实施例中,若第一车辆集成单元viu-mr与第二车辆集成单元viu-f之间的第一千兆以太网1产生故障,使得第一车辆集成单元viu-mr与第二车辆集成单元viu-f之间的通信异常,则可以通过第二千兆以太网2、第三千兆以太网3以及第四千兆以太网4的通路进行数据传输。通过千兆以太网的环状结构为车辆控制结构提供了通信冗余,保证通信的高安全和高实时性。
43.可选地,所述第一车辆集成单元viu-mr用于采集包括车身右侧车门、车轮、制动系统和座椅的第一状态信息以及进行信息路由;
44.所述第二车辆集成单元用于采集包括前舱蓄电池、车灯和喇叭的第二状态信息以及进行信息路由;
45.所述第三车辆集成单元用于采集包括车身左侧车门、车轮、制动系统和座椅的第三状态信息以及进行信息路由;
46.所述第四车辆集成单元用于采集包括充电口、后尾门以及后灯的第四状态信息以及进行信息路由。
47.本发明实施例的车辆控制结构,采用三大计算中心加四个区域控制器的主控架构网络,可根据车型裁剪区域控制器个数,计算中心及区域控制器等主干网络均采用千兆以太网,其他子网根据需求使用canfd及can网络,传统车身简单功能部分采用lin通信。在保
证车辆能够满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
48.本发明基于“三大数据计算中心+四大区域控制器”的物理架构形式,主干采用千兆以太网连接。可以实现采用面向服务的架构(service oriented architecture,soa)的设计理念,进行车内多层服务的定义和部署,局部面向信号设计signal-oriented和整车面向服务设计service-oriented的组合,实现整车soa服务架构设计。
49.1)该架构采用三大计算中心加四个区域控制器的主控架构网络,可根据车型裁剪区域控制器个数,计算中心及区域控制器等主干网络均采用千兆以太网,其他子网根据需求使用canfd及can网络,传统车身简单功能部分采用lin通信。主干千兆以外网成环状连接,实现多网段通信冗余,计算中心、区域控制、底盘等采用双路冗余通讯及供电。两路电源通过智能短路器隔开,实现一个压力转换器给两个低压蓄电池供电。
50.三大数据计算中心整合相关系统(electronic control unit,)ecu的运算资源,实现功能软件的运算深度集成;vdc负责整车功能域控制及整车程序刷写、soa服务设计,cdc负责座舱域功能控制及soa服务设计,adc负责智能驾驶域功能控制及soa服务设计。
51.viu采用区域控制器在局部位置布置,实现相应区域i/0信息的采集和功能的执行及信息路由,viu_f负责前舱蓄电池状态、车灯、喇叭等的信息采集、执行器驱动及信息路由工作,viu_mr负责车身右侧附件、右侧座椅的信息采集与执行器驱动及信息路由工作,viu_ml负责左侧车身附件、座椅等的信息采集或执行器驱动及信息路由工作,viu_r负责充电口、后尾门、后灯等的信息采集与执行器驱动工作及信息路由工作。
52.四大区域控制器按区域实现所有硬件i/o抽象,完成原子服务转化,通过以太网传输到三大数据中心进行服务调用,对于其子网内的传统总线传输功能信号,通过区域控制进行服务的转换,传递到计算中心。上游计算中心运行用户直接感知的应用程序,应用程序通过平台化的api接口调用原子服务,延伸扩展服务和应用服务,实现整车应用软件与下游传感、执行硬件解耦。
53.服务式的低压电源管理,通过将电源管理功能的软件模块,集成到计算中心,遵循soa服务化软件设计,不依赖硬件平台,降低整车低压线束及整车功耗,提升供可靠性和电安全性。
54.可选地,所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接,包括:
55.所述整车数据中心vdc与所述第一车辆集成单元viu-mr以及所述第三车辆集成单元viu-ml之间通过第五千兆以太网5和第六千兆以太网6连接;
56.所述自动驾驶数据中心adc与所述第一车辆集成单元viu-mr通过第七千兆以太网7连接;
57.所述座舱数据中心cdc与所述第一车辆集成单元viu-mr通过第八千兆以太网8连接。
58.可选地,所述座舱数据中心通过灵活数据速率的控制器局域网canfd与所述车辆的车身域总线连接。
59.可选地,所述车辆的蓄电池与至少一个所述整车集成单元通过电池管理器连接;
60.且在与所述蓄电池连接的整车集成单元与所述蓄电池之间设置有智能短路器。
61.可选地,所述自动驾驶数据中心通过灵活数据速率的控制器局域网canfd与所述车辆的制动总线连接。
62.可选地,所述整车数据中心通过控制器局域网can与所述车辆的底盘域总线连接。
63.可选地,所述座舱数据中心通过控制器局域网can与所述车辆的信息娱乐域总线连接。
64.可选地,所述自动驾驶数据中心通过控制器局域网can与所述车辆的防撞预警系统连接。
65.以上所述的是本发明的优选实施方式,应当指出对于本技术领域的普通人员来说,在不脱离本发明所述的原理前提下还可以作出若干改进和润饰,这些改进和润饰也在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1