车辆控制系统以及车辆行驶控制装置的制作方法
1.本公开涉及车辆控制系统以及车辆行驶控制装置。
背景技术:
2.在日本特开2017-114195中公开了一种与在进行碰撞避免控制的情况下能避免产生行驶控制的干扰的车辆控制装置相关的技术。该技术的车辆控制装置执行避免车辆与障碍物的碰撞的第一控制(碰撞避免控制)。而且,车辆控制装置执行巡航控制、车道维持控制这样的第二控制。车辆控制装置识别车辆的周围的障碍物,并基于其识别结果来判定规定的碰撞避免条件是否已成立。在第二控制的执行中判定为碰撞避免条件已成立的情况下,车辆控制装置停止第二控制并执行第一控制。
3.在此,考虑:自动驾驶控制装置基于自动驾驶的行驶计划来计算目标轨迹,车辆行驶控制装置以追随该目标轨迹的方式控制车辆行驶。在车厢内配置有用于供车辆行驶控制装置经由车辆的前窗获取周边信息的摄像机等传感器装置。传感器装置的识别度有时会由于前窗弄上污垢而降低。在这样的情况下,车辆行驶控制装置能通过进行清洗液的喷出动作来去除前窗玻璃的污垢。
4.然而,在车辆配置有用于供自动驾驶控制装置识别车辆的周边状况的各种传感器装置。因此,由车辆行驶控制装置进行的清洗液的喷出动作恐怕会对自动驾驶控制装置所利用的传感器装置的识别度暂时地造成不良影响。
技术实现要素:
5.本公开是鉴于上述这样的问题而完成的,其目的在于,提供一种能避免清洗动作在对于自动驾驶控制装置而言不当的定时进行工作的车辆控制系统以及车辆行驶控制装置。
6.为了解决上述的问题,第一公开被应用于一种车辆控制系统,该车辆控制系统控制进行自动驾驶的车辆。车辆控制系统具备:自动驾驶控制装置,生成用于车辆的自动驾驶的目标轨迹;以及车辆行驶控制装置,执行以车辆追随目标轨迹的方式控制车辆的转向、加速以及减速的车辆行驶控制。车辆行驶控制装置被配置为:判定将清洗液喷出至车辆的前窗或传感器装置的清洗动作的工作请求条件是否成立,在工作请求条件成立的情况下,将清洗动作的批准请求发送至自动驾驶控制装置,在从自动驾驶控制装置接收到对批准请求的批准的情况下,执行清洗动作。
7.第二公开在第一公开中还具有以下的特征。
8.车辆包括周边状况传感器,该周边状况传感器从车厢内隔着前窗识别车辆的周围的状况。车辆行驶控制装置被配置为:基于由周边状况传感器获取到的周边信息来执行进行对车辆行驶控制的控制量的干预以预防或避免车辆与障碍物的碰撞的预防安全控制。并且,工作请求条件包括周边状况传感器的识别度低于阈值。
9.第三公开在第二公开中还具有以下的特征。
10.工作请求条件包括外部气温比清洗液的冻结温度高。
11.第四公开在第一公开至第三公开中的任一个公开中还具有以下的特征。
12.车辆行驶控制装置被配置为:在工作请求条件成立的情况下,并且在车辆处于停车中的情况下,不将批准请求发送至自动驾驶控制装置就执行清洗动作。
13.此外,为了解决上述的问题,第五公开被应用于一种车辆行驶控制装置,该车辆行驶控制装置被配置为:接受由自动驾驶控制装置生成的用于车辆的自动驾驶的目标轨迹,并执行以车辆追随目标轨迹的方式控制车辆的转向、加速以及减速的车辆行驶控制。车辆行驶控制装置被配置为:判定将清洗液喷出至车辆的前窗或传感器装置的清洗动作的工作请求条件是否成立,在工作请求条件成立的情况下,将清洗动作的批准请求发送至自动驾驶控制装置,在从自动驾驶控制装置接收到对批准请求的批准的情况下,执行清洗动作。
14.第六公开在第五公开中还具有以下的特征。
15.车辆包括周边状况传感器,该周边状况传感器从车厢内隔着前窗识别车辆的周围的状况。车辆行驶控制装置被配置为:基于由周边状况传感器获取到的周边信息来执行进行对车辆行驶控制的控制量的干预以预防或避免车辆与障碍物的碰撞的预防安全控制。并且,工作请求条件包括周边状况传感器的识别度低于阈值。
16.第七公开在第六公开中还具有以下的特征。
17.工作请求条件包括外部气温比清洗液的冻结温度高。
18.第八公开在第五公开至第七公开中的任一个公开中还具有以下的特征。
19.车辆行驶控制装置被配置为:在工作请求条件成立的情况下,并且在车辆处于停车中的情况下,不将批准请求发送至自动驾驶控制装置就执行清洗动作。
20.根据第一公开或第五公开,在接收到来自自动驾驶控制装置的批准的情况下使清洗动作进行工作。由此,能避免清洗动作在对于自动驾驶控制装置而言不当的定时进行工作。
21.根据第二公开或第六公开,在由于前窗的污垢而发生了周边状况传感器的识别不良的情况下,能将清洗动作的工作请求发送给自动驾驶控制装置。
22.根据第三公开或第七公开,外部气温比清洗液的冻结温度高被设为清洗动作的工作请求条件。由此,能防止由于在清洗液冻结的状况下进行清洗动作而对自动驾驶控制装置的动作造成影响。
23.根据第四公开或第八公开,在对自动驾驶控制装置的动作不造成影响的车辆的停车中,能不经过向自动驾驶控制装置发送批准请求和从自动驾驶控制装置接收对所述批准请求的批准就执行清洗动作。
附图说明
24.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
25.图1是表示用于对实施方式的车辆控制系统的概要进行说明的构成例的框图。
26.图2是表示实施方式的自动驾驶控制装置的构成例的框图。
27.图3是表示实施方式的车辆行驶控制装置的构成例的框图。
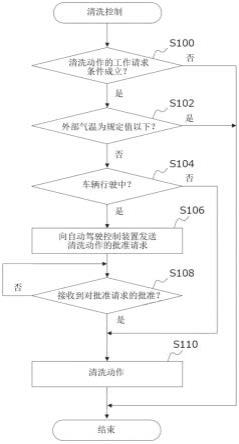
28.图4是表示第二控制装置所执行的清洗控制的控制例程的流程图。
具体实施方式
29.以下,参照附图对本发明的实施方式进行说明。不过,在以下所示的实施方式中提及了各要素的个数、数量、量、范围等数字的情况下,除了特别明示的情况、在原理上明显地确定为该数字的情况之外,本发明不限定于该提及的数字。此外,就在以下所示的实施方式中进行说明的构造、步骤等而言,除了特别明示的情况、在原理上明显地确定为该构造、步骤等的情况之外,在本发明中不一定是必须的。
30.实施方式.
31.1.本实施方式的车辆控制系统的整体构成
32.首先,对本实施方式的车辆控制系统的概略构成进行说明。图1是表示用于对本实施方式的车辆控制系统的概要进行说明的构成例的框图。图1所示的车辆控制系统100搭载于车辆。以下,将搭载有车辆控制系统100的车辆也表述为“车辆v1”。车辆v1是能自动驾驶的自动驾驶车辆。作为此处的自动驾驶,假定了sae(society of automotive engineers:美国汽车工程师学会)的等级定义中的三级以上的自动驾驶。需要说明的是,车辆v1的动力源没有限定。
33.车辆控制系统100控制车辆v1。或者,也可以是,车辆控制系统100的至少一部分配置于车辆v1的外部的外部装置,远程地控制车辆。就是说,车辆控制系统100可以分散地配置于车辆v1和外部装置。
34.如图1所示,车辆控制系统100被配置为包括自动驾驶控制装置10、车辆行驶控制装置20、行驶装置60以及清洗装置70。自动驾驶控制装置10是用于进行车辆v1的自动驾驶的管理的系统。车辆行驶控制装置20是用于进行车辆v1的车辆行驶控制的系统。自动驾驶控制装置10和车辆行驶控制装置20既可以是在物理上分开的装置,也可以是相同的装置。在自动驾驶控制装置10和车辆行驶控制装置20是在物理上分开的装置的情况下,它们通过通信来交换所需的信息。
35.行驶装置60包括转向装置、驱动装置以及制动装置。转向装置对车辆v1的车轮进行转舵。驱动装置是使车辆v1的驱动力产生的驱动源。作为驱动装置,可举例示出发动机、电动机。制动装置使车辆v1产生制动力。行驶装置60基于与车辆v1的转向、加速以及减速有关的行驶控制量来控制车辆v1的行驶。
36.清洗装置70是进行朝向车辆v1的前窗喷射清洗液的清洗动作的装置。清洗装置70的构造没有限定。清洗装置70根据来自驾驶员或车辆行驶控制装置20的工作请求来进行清洗动作。
37.自动驾驶控制装置10具有自动驾驶功能部8来作为用于进行车辆v1的自动驾驶的功能。此外,车辆行驶控制装置20具有运动控制功能部30、预防安全功能部40以及清洗控制功能部50来作为用于进行车辆行驶控制、预防安全控制以及清洗控制的功能。以下,还参照图2和图3对自动驾驶控制装置10和车辆行驶控制装置20的构成和功能进行说明。
38.2.自动驾驶控制装置的构成和功能
39.图2是表示本实施方式的自动驾驶控制装置的构成例的框图。如该图所示,自动驾驶控制装置10具备用于管理车辆v1的自动驾驶的第一控制装置12。此外,自动驾驶控制装置10具备连接于第一控制装置12的输入侧的第一信息获取装置14。
40.第一信息获取装置14被配置为包括周边状况传感器141、车辆状态传感器142、车
辆位置传感器143以及通信装置144。
41.周边状况传感器141识别车辆v1的周边信息。例如,周边状况传感器141可举例示出摄像机(拍摄装置)、激光雷达(lidar:laser imaging detection and ranging(激光成像探测和测距))以及雷达等。周边信息包括由周边状况传感器141识别出的物标信息。作为物标,可举例示出周边车辆、行人、路边物、障碍物、白线、信号灯等。物标信息包括物标相对于车辆v1的相对位置和相对速度。在周边状况传感器141中识别出的周边信息随时被发送至第一控制装置12。
42.车辆状态传感器142检测表示车辆v1的状态的车辆信息。作为车辆状态传感器142,可举例示出车速传感器、横向加速度传感器、横摆角速度传感器等。由车辆状态传感器142检测到的车辆信息随时被发送至第一控制装置12。
43.车辆位置传感器143检测车辆v1的位置和方位。例如,车辆位置传感器143包括gps(global positioning system:全球定位系统)传感器。gps传感器接收从多个gps卫星发送的信号,并基于接收信号来计算车辆v1的位置和方位。车辆位置传感器143也可以进行众所周知的自身位置推定处理(localization:定位)来提高车辆v1的当前位置的精度。由车辆位置传感器143检测到的车辆信息随时被发送至第一控制装置12。
44.通信装置144与车辆的外部进行通信。例如,通信装置144经由通信网络与车辆v1的外部装置进行通信。此处的外部装置可举例示出路侧机、周边车辆、周围的基础设施等。路侧机是发送例如拥堵信息、各车道的交通信息、临时停止等管制信息、盲区位置的交通状况的信息等的信标(beacon)装置。此外,在外部装置是周边车辆的情况下,通信装置144在与周边车辆之间进行车车间通信(v2v通信)。而且,在外部装置是周边的基础设施的情况下,通信装置144在与周围的基础设施之间进行路车间通信(v2i通信)。
45.第一控制装置12是进行车辆控制系统100中的各种处理的信息处理装置。典型而言,第一控制装置12是具备第一处理器122、第一存储装置124以及第一输入输出接口126的微型计算机。第一控制装置12也被称为ecu(electronic control unit:电子控制单元)。
46.在第一存储装置124中储存有各种信息。例如,在第一存储装置124中储存有由第一信息获取装置14获取到的驾驶环境信息。驾驶环境信息是表示车辆v1的驾驶环境的信息,包括表示车辆v1的位置的车辆位置信息、表示车辆v1的状态的车辆状态信息、表示车辆v1的周围的状况的周边状况信息等。作为第一存储装置124,可举例示出易失性存储器、非易失性存储器、hdd(hard disk drive:硬盘驱动器)等。
47.在第一存储装置124中储存有包含详细的道路信息的地图信息。在该地图信息中包括例如道路的形状、车道数、车道宽度的信息等。或者,地图信息也可以储存于外部的管理服务器。在该情况下,第一控制装置12与管理服务器进行通信来获取所需的地图信息。获取到的地图信息记录于第一存储装置124。
48.第一处理器122执行作为计算机程序的自动驾驶软件。自动驾驶软件储存于第一存储装置124。或者,自动驾驶软件记录于计算机可读取记录介质。第一处理器122执行自动驾驶软件,由此第一控制装置12的功能被实现。
49.具体而言,第一处理器122执行与车辆v1的自动驾驶相关的自动驾驶软件,由此自动驾驶功能部8的功能被实现。就是说,自动驾驶功能部8作为进行车辆v1的自动驾驶的功能而被嵌入第一控制装置12。典型而言,第一控制装置12进行生成用于车辆v1的自动驾驶
的目标轨迹的目标轨迹生成处理。
50.在此,目标轨迹至少包括车辆v1所行驶的道路内的车辆v1的目标位置[xi,yi]的集合。需要说明的是,此处的x方向是车辆v1的前方方向,y方向是与x方向正交的平面方向。需要说明的是,目标轨迹还可以包括每个目标位置[xi,yi]的目标速度[vxi,vyi]。
[0051]
在目标轨迹生成处理中,首先,第一控制装置12从第一信息获取装置14获取驾驶环境信息。驾驶环境信息储存于第一存储装置124。接着,第一控制装置12基于地图信息和驾驶环境信息来生成用于车辆v1的自动驾驶的目标轨迹。更详细而言,第一控制装置12基于地图信息和驾驶环境信息来生成自动驾驶中的车辆v1的行驶计划。第一控制装置12基于驾驶环境信息来生成车辆v1按照所生成的行驶计划行驶所需的目标轨迹。
[0052]
需要说明的是,在自动驾驶控制装置10所进行的目标轨迹生成处理中,应用公知的技术。因此,与目标轨迹生成处理关联的自动驾驶控制装置10的功能的说明限于上述的记载。与本实施方式的特征关联的自动驾驶控制装置10的功能的说明在后文进行详细叙述。
[0053]
第一输入输出接口126是用于在与车辆行驶控制装置20之间交换信息的接口。在第一控制装置12中生成的目标轨迹经由第一输入输出接口126输出给车辆行驶控制装置20。
[0054]
3.车辆行驶控制装置的构成和功能
[0055]
图3是表示本实施方式的车辆行驶控制装置的构成例的框图。如该图所示,车辆行驶控制装置20具备第二控制装置22、第二信息获取装置24以及第二输入输出接口226。
[0056]
第二信息获取装置24具有摄像机241、激光雷达(lidar:laser imaging detection and ranging)242以及雷达243来作为用于识别车辆v1的周边信息的周边状况传感器。这些周边状况传感器中的摄像机241搭载于车辆v1的车厢内,激光雷达242和雷达243搭载于车厢外。摄像机241从车厢内隔着前窗拍摄车辆前方。在以下的说明中,将由摄像机241隔着前窗拍摄到的图像信息表述为“摄像机图像信息”。由摄像机241拍摄到的摄像机图像信息随时被发送至第二控制装置22。
[0057]
由周边状况传感器识别出的周边信息包括物标信息。作为物标,可举例示出周边车辆、行人、路边物、障碍物、白线、信号灯等。物标信息包括物标相对于车辆v1的相对位置和相对速度。在周边状况传感器中识别出的周边信息随时被发送至第二控制装置22。
[0058]
第二信息获取装置24还具有车辆状态传感器244。车辆状态传感器244检测表示车辆v1的状态的车辆信息。作为车辆状态传感器244,可举例示出车速传感器、横向加速度传感器、横摆角速度传感器等。由车辆状态传感器244检测到的车辆信息随时被发送至第二控制装置22。
[0059]
需要说明的是,第一信息获取装置14和第二信息获取装置24可以部分地共同化。就是说,自动驾驶控制装置10和车辆行驶控制装置20可以共用第一信息获取装置14或者第二信息获取装置24的一部分。在该情况下,自动驾驶控制装置10和车辆行驶控制装置20相互交换所需的信息。
[0060]
此外,第二信息获取装置24除了具备上述的传感器类之外还可以具备与车辆位置传感器143、通信装置144相同的装置。
[0061]
第二控制装置22是进行车辆控制系统100中的各种处理的信息处理装置。典型而
言,第二控制装置22是具备第二处理器222、第二存储装置224以及第二输入输出接口226的微型计算机。第二控制装置22也被称为ecu(electronic control unit)。
[0062]
在第二存储装置224中储存有各种信息。例如,在第二存储装置224中储存有由第二信息获取装置24获取到的摄像机图像信息、周边信息以及车辆信息。作为第二存储装置224,可举例示出易失性存储器、非易失性存储器、hdd(hard disk drive)等。
[0063]
第二处理器222执行作为计算机程序的车辆行驶控制软件。车辆行驶控制软件储存于第二存储装置224。或者,车辆行驶控制软件记录于计算机可读取记录介质。第二处理器222执行车辆行驶控制软件,由此第二控制装置22的功能被实现。
[0064]
具体而言,第二处理器222执行与车辆行驶控制相关的车辆行驶控制软件,由此运动控制功能部30、预防安全功能部40以及清洗控制功能部50的各功能被实现。就是说,运动控制功能部30、预防安全功能部40以及清洗控制功能部50作为进行车辆行驶控制、预防安全控制以及清洗控制的功能而被嵌入第二控制装置。
[0065]
需要说明的是,运动控制功能部30、预防安全功能部40以及清洗控制功能部50也可以被嵌入在物理上不同的控制装置。在该情况下,车辆行驶控制装置20单独地具备用于进行车辆行驶控制的运动控制功能部30的控制装置、用于进行预防安全控制的预防安全功能部40的控制装置以及用于进行清洗控制的清洗控制功能部50的控制装置即可。
[0066]
第二输入输出接口226是用于在与自动驾驶控制装置10之间交换信息的接口。从第一控制装置12输出的目标轨迹、后述的对批准请求的批准经由第二输入输出接口226输入给车辆行驶控制装置20。
[0067]
4.在车辆行驶控制装置中执行的控制
[0068]
接着,对车辆行驶控制装置20的第二控制装置22所执行的车辆行驶控制、预防安全控制以及清洗控制更详细地进行说明。
[0069]
4-1.车辆行驶控制
[0070]
第二控制装置22执行控制车辆v1的转向、加速以及减速的车辆行驶控制。典型而言,第二控制装置22通过控制行驶装置60的动作来进行车辆行驶控制。具体而言,第二控制装置22通过控制转向装置来控制车辆v1的转舵。此外,第二控制装置22通过控制驱动装置来控制车辆v1的加速。第二控制装置22通过控制制动装置来控制车辆v1的减速。
[0071]
在车辆行驶控制中,第二控制装置22在车辆v1的自动驾驶的过程中从自动驾驶控制装置10接受目标轨迹。基本上,第二控制装置22以车辆v1追随目标轨迹的方式控制与车辆v1的转向、加速以及减速有关的行驶控制量。典型而言,运动控制功能部30计算车辆v1的各种状态量与目标轨迹的偏差(例如,横向偏差、横摆角偏差、速度偏差等),并以该偏差减小的方式进行车辆行驶控制。
[0072]
4-2.预防安全控制
[0073]
第二控制装置22以车辆v1的安全性的提高为目的而进行预防安全控制,该预防安全控制是对车辆行驶控制的行驶控制量进行干预的控制。典型而言,第二控制装置22在车辆v1的自动驾驶中进行避免车辆v1向碰撞对象的碰撞的碰撞避免控制。在碰撞避免控制中,第二控制装置22从第二信息获取装置24获取周边信息和车辆信息。获取到的这些信息储存于第二存储装置224。接着,第二控制装置22基于周边信息和车辆信息来感测作为回避对象的物体。接着,第二控制装置22判定针对回避对象的预防安全控制的工作条件是否成
立。工作条件例如被设为“从车辆v1起至回避对象为止的碰撞剩余时间(ttc;time to collision(碰撞时间))比规定的阈值小”。其结果是,在工作条件成立的情况下,第二控制装置22计算用于避免向回避对象的碰撞的干预行驶控制量。计算出的干预行驶控制量被输出给运动控制功能部30。
[0074]
基本上,运动控制功能部30以车辆v1追随目标轨迹的方式运算车辆v1的行驶控制量。不过,在从预防安全功能部40输入了干预行驶控制量的情况下,运动控制功能部30基于从预防安全功能部40输入的干预行驶控制量来修正行驶控制量。典型而言,在从预防安全功能部40输入了干预行驶控制量的情况下,运动控制功能部30将干预行驶控制量作为最终的行驶控制量输出。
[0075]
4-3.清洗控制
[0076]
若车辆v1的前窗的视觉辨认性由于污垢等而降低,则摄像机241对周边状况的识别度有时会降低。在该情况下,也假定无法充分地有效利用预防安全控制的功能。
[0077]
因此,在清洗控制中,在表示摄像机241对周边状况的识别度由于前窗的污垢而降低了的条件已成立的情况下,第二控制装置22进行从清洗装置70喷射清洗液的清洗动作。以下,该条件被称为“工作请求条件”。第二控制装置22基于摄像机241的摄像机图像信息来判定工作请求条件是否成立。例如,第二控制装置22在基于摄像机图像信息的物标识别的可靠度(准确度)比规定的阈值低的情况下,认为在前窗附着有污垢,判定工作请求条件成立。或者,第二控制装置22在判定为在车辆v1的行驶中的摄像机图像信息中除了没有变化的图像区域之外的正常图像区域比一定比例小的情况下,认为在前窗附着有污垢,判定工作请求条件成立。或者,第二控制装置22在判定为摄像机图像信息中的除了白色或黑色的图像区域之外的正常图像区域比一定比例小的情况下,认为在前窗附着有雪或污垢,判定工作请求条件成立。
[0078]
不过,在由第一信息获取装置14获取的驾驶环境信息包括隔着前窗获取的周边信息的情况下,清洗动作恐怕会对在第一控制装置12中执行的自动驾驶的控制造成不良影响。典型而言,若在车辆v1的自动驾驶中清洗液被喷出至前窗,则恐怕会损害周边状况传感器141的拍摄范围的视觉辨认性。如此,根据车辆v1的驾驶状况,还存在如下状况:比起恢复由第二控制装置22实现的预防安全控制的功能,应该优先维持由第一控制装置12实现的自动驾驶的功能。
[0079]
因此,在本实施方式的车辆控制系统中,在判定为第二控制装置22应该执行清洗动作的情况下,对第一控制装置12请求对清洗动作的批准。以下,该请求被称为“批准请求”。接受了批准请求的第一控制装置12综合地判断进行了清洗动作的情况对自动驾驶的影响程度,判定可否进行对批准请求的批准。
[0080]
第二控制装置22在从第一控制装置12接受了批准的情况下,执行清洗动作。根据这样的控制,能在不对由自动驾驶控制装置10实现的自动驾驶的功能造成影响的情况下恢复车辆行驶控制装置20的预防安全控制的功能。
[0081]
需要说明的是,在外部气温为清洗液的冻结温度(例如0℃)以下的情况下,通过清洗动作喷出的清洗液恐怕会附着于前窗并冻结,从而视野会变得更差。因此,第二控制装置22也可以以如下方式进行控制:在判定为需要清洗动作的情况下,并且在外部气温为规定的冻结温度以下的情况下,不执行清洗动作。
[0082]
此外,在车辆v1的停车中,即使执行了清洗动作,对自动驾驶的控制的影响也小。因此,第二控制装置22也可以以如下方式进行控制:在判定为需要清洗动作的情况下,并且在车辆v1不处于行驶中的情况下,不将批准请求发送至自动驾驶控制装置10就执行清洗动作。
[0083]
如此,根据本实施方式的车辆控制系统100,能避免由车辆行驶控制装置20进行的清洗动作在对于自动驾驶控制装置10而言不当的定时被执行。
[0084]
5.在车辆控制系统中执行的清洗控制的具体处理
[0085]
图4是表示第二控制装置22所执行的清洗控制的控制例程的流程图。第二控制装置22以规定的控制周期反复执行图4所示的例程。
[0086]
在图4所示的例程的步骤s100中,第二控制装置22判定清洗动作的工作请求条件是否成立。在此,第二控制装置22判定摄像机241的识别度是否低于规定的阈值。摄像机241的识别度例如可以将基于摄像机图像信息的物标识别的可靠度(准确度)、摄像机图像中的除了没有变化的图像区域以外的图像区域的比例、摄像机图像中的除了白色或黑色的区域以外的图像区域的比例等用作指标。其结果是,在不认可判定的成立的情况下,判断为不需要清洗动作,结束本例程。
[0087]
另一方面,在认可了步骤s100的判定的成立的情况下,判断为需要清洗动作,处理进入下一个步骤s102。在步骤s102中,第二控制装置22判定外部气温是否为规定值以下。此处的规定值被读入作为喷射至前窗的清洗液冻结的温度的、预先设定的值(例如0℃)。其结果是,在认可了判定的成立的情况下,判断为由于清洗液的冻结而对由自动驾驶控制装置10实现的自动驾驶的功能造成影响,不进行清洗动作而结束本例程。
[0088]
另一方面,在不认可步骤s102的判定的成立的情况下,处理进入下一个步骤s104。在步骤s104中,第二控制装置22基于车辆信息来判定车辆v1是否处于行驶中。其结果是,在车辆v1处于停车中的情况下,判断为清洗动作不会对由自动驾驶控制装置10实现的自动驾驶的功能造成影响,处理进入步骤s110的处理。另一方面,在车辆v1处于行驶中的情况下,判断为清洗动作可能会对由自动驾驶控制装置10实现的自动驾驶的功能造成影响,处理进入步骤s106。
[0089]
在步骤s106中,第二控制装置22将清洗动作的批准请求发送至自动驾驶控制装置10。自动驾驶控制装置10的第一控制装置12综合地判断进行了清洗动作的情况对自动驾驶的影响程度,判定可否进行对批准请求的批准。然后,第一控制装置12在判定为能批准的情况下,将对批准请求的批准发送至车辆行驶控制装置20。
[0090]
若进行了步骤s106的处理,则处理进入下一个步骤s108。在步骤s108中,第二控制装置22判定是否从自动驾驶控制装置10接收到对批准请求的批准。其结果是,在未接收到批准的情况下,判断为对自动驾驶控制装置10的自动驾驶有影响,进行待机直至接收到批准为止。另一方面,在接收到批准的情况下,判断为对自动驾驶控制装置10的自动驾驶没有影响,处理进入下一个步骤s110。在步骤s110中,第二控制装置22执行清洗动作。
[0091]
如此,根据本实施方式的车辆控制系统100,能避免清洗动作在对于自动驾驶控制装置10的自动驾驶的功能而言不当的定时被执行。
[0092]
5.变形例
[0093]
本实施方式的车辆控制系统100也可以采用如以下这样变形的方案。
[0094]
在图4所示的清洗控制的控制例程中,步骤s102的处理和步骤s104的处理不是必须的。
[0095]
工作请求条件只要是能判定由前窗的污垢引起的周边状况传感器的识别度的降低的条件即可,不限于使用摄像机241的摄像机图像信息的条件。即,就工作请求条件的判定而言,只要是基于由受到前窗的污垢的影响的周边状况传感器获取的周边信息的条件即可,例如也可以是基于由搭载于车厢内的激光雷达、雷达获取的周边信息的条件。
[0096]
由清洗装置70进行的清洗动作不限于朝向车辆v1的前窗喷射清洗液的动作。即,也考虑到:在第二信息获取装置24中所包括的传感器装置中,摄像机241的镜头部或激光雷达242、雷达243的电波透过部露出在车辆v1的外部。在车辆v1具备这样的传感器装置的情况下,由清洗装置70进行的清洗动作也可以被配置为朝向露出在外部的传感器装置的镜头部或电波透过部喷射清洗液的动作。在该情况下,工作请求条件设为表示作为对象的传感器装置的识别度降低了的条件即可。
[0097]
自动驾驶控制装置10和车辆行驶控制装置20也可以分开设计、开发。例如,负责车辆行驶控制的车辆行驶控制装置20由精通机械、车辆运动特性的开发者(典型而言为汽车制造商)设计、开发。在该情况下,车辆行驶控制装置20的可靠度极高。以利用这样的高可靠度的预防安全功能部40为前提,自动驾驶服务提供者能设计、开发自动驾驶控制装置10用的软件。在该意义上,车辆行驶控制装置20可以说是用于自动驾驶服务的平台。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1