一种自动泊车路径规划方法、装置、介质及设备与流程
本申请涉及自动驾驶,特别涉及一种自动泊车路径规划方法、装置、介质及设备。
背景技术:
1、自动泊车是自动驾驶中的一项重要功能。现有技术中已有多种自动泊车路径规划方法,包括实时圆弧法,根据车的位置以及车位的位置,根据车的位置以及车位的位置,在不与由车位边界、道路边线以及障碍物构成泊车空间发生碰撞,并且符合运动学约束的前提下,利用多条圆弧拼接得到预先规划的泊车路径。另一种自动泊车路径规划方法,利用hybrida*搜索算法计算规划泊车路径。上述两种方法在规划泊车路线的过程中需要较大的泊车空间,但受限于具体泊车环境,使得路径规划成功率低,泊车效率低。
技术实现思路
1、针对现有技术存在的问题,本申请主要提供一种自动泊车路径规划方法、装置、介质及设备,通过构造泊车空间的虚拟边界,利用缩小后的虚拟车辆轮廓与虚拟边界进行碰撞测试,使得实际泊车场景中车辆可以压过地面标线,增大进行路径规划时的可用泊车空间,提高路径规划成功率,减少泊车所需空间,提高泊车效率。
2、为了实现上述目的,本申请采用的一个技术方案是:提供一种自动泊车路径规划方法,其包括:
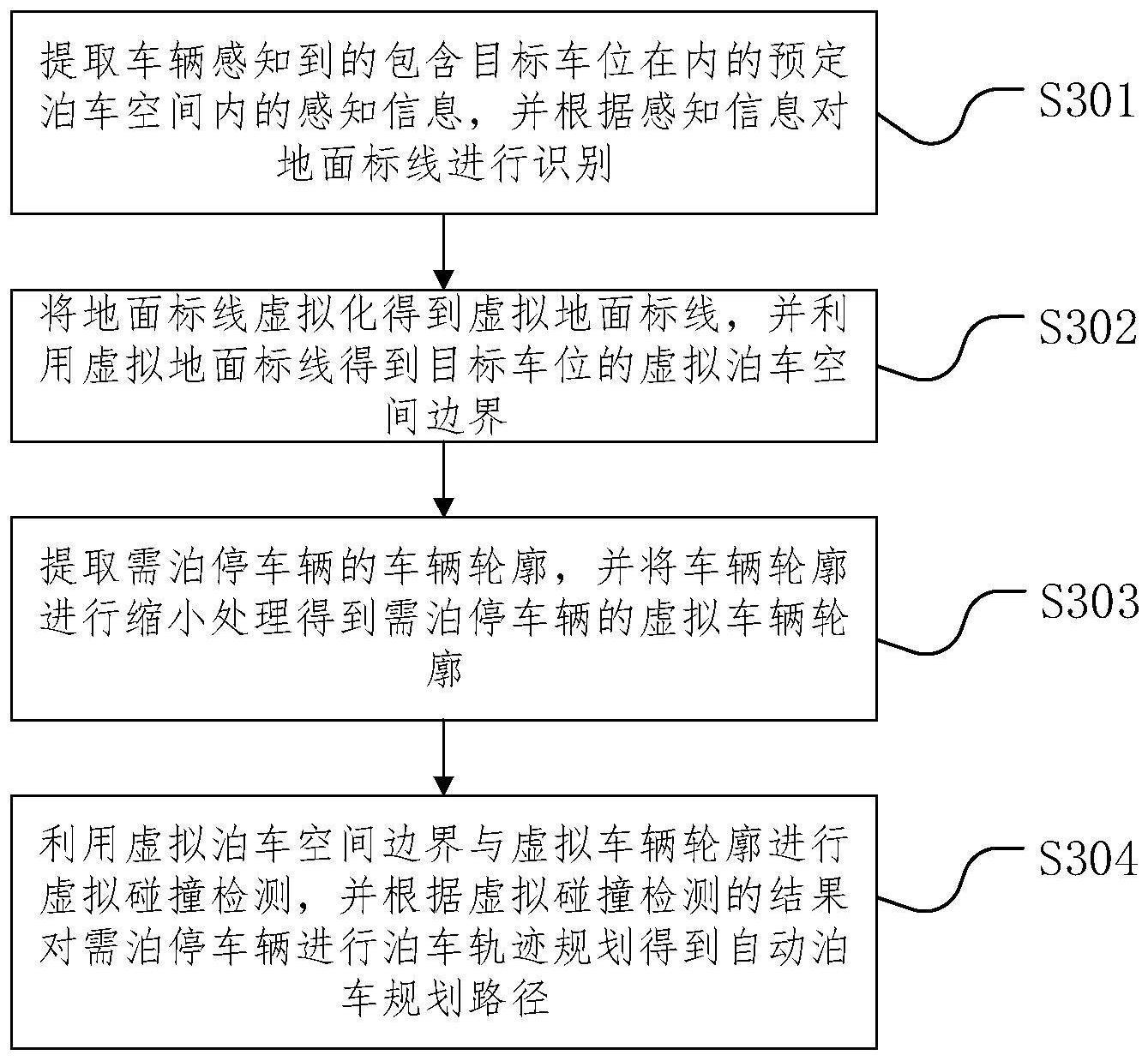
3、提取车辆感知到的包含目标车位在内的预定泊车空间内的感知信息,并根据感知信息对地面标线进行识别;将地面标线虚拟化得到虚拟地面标线,并利用虚拟地面标线得到目标车位的虚拟泊车空间边界;提取需泊停车辆的车辆轮廓,并将车辆轮廓进行缩小处理得到需泊停车辆的虚拟车辆轮廓;利用虚拟泊车空间边界与虚拟车辆轮廓进行虚拟碰撞检测,并根据虚拟碰撞检测的结果对需泊停车辆进行泊车轨迹规划得到自动泊车规划路径。
4、本申请采用的另一个技术方案是:提供一种自动泊车路径规划装置,其包括:
5、地面标线获取模块,用于提取车辆感知到的包含目标车位在内的预定泊车空间内的感知信息,并根据感知信息对地面标线进行识别;虚拟泊车空间边界获取模块,用于将地面标线虚拟化得到虚拟地面标线,并利用虚拟地面标线得到目标车位的虚拟泊车空间边界;虚拟车辆轮廓获取模块,用于提取需泊停车辆的车辆轮廓,并将车辆轮廓进行缩小处理得到需泊停车辆的虚拟车辆轮廓;碰撞检测及规划模块,用于利用虚拟泊车空间边界与虚拟车辆轮廓进行虚拟碰撞检测,并根据虚拟碰撞检测的结果对需泊停车辆进行泊车轨迹规划得到自动泊车规划路径。
6、本申请采用的另一个技术方案是:提供一种计算机可读存储介质,其存储有计算机指令,该计算机指令被操作以执行上述方案中的自动泊车路径规划方法。
7、本申请采用的另一个技术方案是:提供一种计算机设备,其包括处理器和存储器,存储器存储有计算机指令,该计算机指令被操作以执行上述方案中的自动泊车路径规划方法。
8、本申请的技术方案可以达到的有益效果是:一种自动泊车路径规划方法、装置、介质及设备。本申请通过利用地面标线构造泊车空间的虚拟边界,并利用缩小后的虚拟车辆轮廓与虚拟边界进行碰撞测试,使得在实际泊车场景中车辆可以压过地面标线,增大进行路径规划时的可用泊车空间,提高路泊车径规划成功率,减少泊车所需空间,提高泊车效率。
技术特征:
1.一种自动泊车路径规划方法,其特征在于,包括:
2.根据权利要求1所述的自动泊车路径规划方法,其特征在于,
3.根据权利要求1所述的自动泊车路径规划方法,其特征在于,所述将所述车辆轮廓进行缩小处理得到所述需泊停车辆的虚拟车辆轮廓的过程包括,
4.根据权利要求1所述的自动泊车路径规划方法,其特征在于,所述将所述车辆轮廓进行缩小处理得到所述需泊停车辆的虚拟车辆轮廓的过程包括,
5.根据权利要求1所述的自动泊车路径规划方法,其特征在于,还包括,
6.根据权利要求4所述的自动泊车路径规划方法,其特征在于,还包括,
7.根据权利要求5所述的自动泊车路径规划方法,其特征在于,还包括,所述将所述地面侧边线以及与所述地面侧边线相交的道路边线进行裁剪的过程包括,
8.一种自动泊车路径规划装置,其特征在于,包括,
9.一种计算机可读存储介质,其存储有计算机指令,其特征在于,所述计算机指令被操作以执行权利要求1-7中任一项所述的自动泊车路径规划方法。
10.一种计算机设备,其包括处理器和存储器,所述存储器存储有计算机指令,其中所述处理器操作所述计算机指令以执行权利要求1-7中任一项所述的自动泊车路径规划方法。
技术总结
本申请公开了一种自动泊车路径规划方法、装置、介质及设备,属于自动驾驶技术领域。该方法主要包括,提取车辆感知到的包含目标车位在内的预定泊车空间内的感知信息,并根据感知信息对地面标线进行识别;将地面标线虚拟化得到虚拟地面标线,并利用虚拟地面标线得到目标车位的虚拟泊车空间边界;提取需泊停车辆的车辆轮廓,并将车辆轮廓进行缩小处理得到需泊停车辆的虚拟车辆轮廓;利用虚拟泊车空间边界与虚拟车辆轮廓进行虚拟碰撞检测,并根据虚拟碰撞检测的结果对需泊停车辆进行泊车轨迹规划得到自动泊车规划路径。本申请能够增大进行路径规划时的可用泊车空间,提高路泊车径规划成功率,减少泊车所需空间,提高泊车效率。
技术研发人员:黄政明,冉旭,田勃,徐志江,顾云峰
受保护的技术使用者:魔门塔(苏州)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!