双侧独立电驱动履带车电机转矩计算方法与流程
1.本发明涉及无人履带车辆控制技术领域,具体涉及一种双侧独立电驱动履带车电机转矩计算方法。
背景技术:
2.履带车辆由于其可靠性高、通过性强,在各种非结构路面以及非结构地形下具有良好的应用。
3.传统履带车辆通常具有发动机、变速器、转向机构、传动轴、侧减速器等动力传动系统,其中,发动机为动力源;变速器通过不同档位齿轮啮合来改变来自发动机的转速和转矩;转向机构通过横向拉杆实现两侧履带的差速转向;传动轴则将变速器的动力传输至侧减速器;侧减速器通过两级/多级齿轮传动,将来自传动轴的动力减速增扭后,传递至主动轮。整车的牵引特性曲线由发动机和减速器共同决定。
4.双侧独立驱动的混合动力无人履带车辆具有发电机组、高压电池、驱动电机、侧减速器等动力传动装置,其中,发电机组和高压电池为驱动电机供电;驱动电机输出转速和转矩;侧减速器通过多级齿轮传动,将来自传动轴的动力减速增扭后,传递至主动轮。与传统履带车相比,双侧独立驱动的混合动力无人履带车辆由于缺少了变速器,导致传输至主动轮的动力只能靠电机自身来调节,整车牵引特性曲线由驱动电机单独决定。
5.无人履带车辆通过远程遥控或者自动驾驶算法,对整车进行路径规划,需要进行转速闭环的运动学控制。由于履带车辆通常需要面对各种特种工况(35度纵坡、垂直墙、壕沟、高速行驶、中心转向等),因此需要对整车动力学转矩进行精确控制,才能满足运动学需求。
6.目前,双侧独立驱动的无人驾驶履带车辆动力学转矩分配主要靠参数标定来实现,通过参数标定法,获得一个相对合理的转矩,其缺点是同一组参数很难匹配各种不同工况,车辆行进时经常会出现动力不足或超调现象,随着运动学控制精度的进一步提升,原有的动力学转矩计算方法已经越来越不满足需求。
技术实现要素:
7.针对现有技术存在的问题,本发明提供一种基于前馈和反馈的双侧独立电驱动履带车电机转矩计算方法,尽可能针对不同行车工况提高驱动电机扭矩的自适应性,提高整车响应能力,降低超调量。
8.本发明通过以下技术方案来实现:
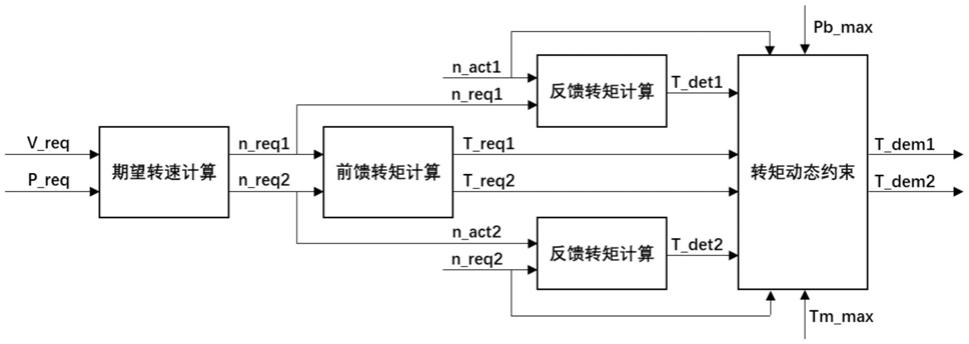
9.双侧独立电驱动履带车电机转矩计算方法,所述计算方法上层接口为车速、曲率、档位、模式,所述计算方法下层接口为驱动电机目标转矩,所述上层接口接受来自遥控系统/自主驾驶系统控制指令,包括车速、曲率、档位、模式四个信号,所述车速信号为整车目标纵向车速;所述曲率信号为整车目标曲率;所述档位信号包括空挡、前进挡、后退档和中心转向档;所述模式包括普通模式和越野模式,所述普通模式用于正常行车使用,所述越野
模式用于特种工况使用;
10.所述下层接口为整车控制器根据当前控制指令和整车实际状态计算最优的转矩,并下发给驱动电机控制器的目标转矩,包括:期望转速计算、前馈转矩计算、反馈转矩计算以及动态转矩约束。
11.所述计算方法的步骤如下:
12.步骤一:进行期望转速计算,根据两侧电机的转速,可以计算得到车速和曲率,如下:
[0013][0014][0015]
式中:v——车速,单位:km/h;
[0016]
n1、n2——两侧驱动电机转速,单位:r/min;
[0017]rz
——驱动轮有效半径,单位:m;
[0018]
ic——电机到驱动轮减速比;
[0019]
ρ——曲率,单位:1/m;
[0020]
b——履带中心距,单位:m。
[0021]
根据上述公式,可以计算得到两侧电机期望转速与期望车速、期望曲率的关系,如下:
[0022][0023][0024]
式中,n
req1
、n
req2
——两侧电机期望转速,单位:r/min;
[0025]vreq
——期望车速,单位:km/h;
[0026]
ρ
req
——期望曲率,单位:1/m。
[0027]
步骤二:进行前馈转矩计算,根据两侧电机的期望转速,可以得到稳态条件下两电机的期望转矩,作为转矩控制算法中的前馈转矩。根据期望曲率的不同,前馈转矩的计算公式有所不同,如下:
[0028]
如果ρ
req
《2/b,则有:
[0029][0030][0031]
如果ρ
req
≥2/b,则有:
[0032][0033][0034]
式中,t
req1
、t
req2
——两侧电机的前馈转矩,单位:n
·
m;
[0035]
f——路面滚动阻力系数;
[0036]
μ——路面转向阻力系数;
[0037]
l——履带接地长,单位:m。
[0038]
步骤三:进行反馈转矩计算,根据电机的期望转速与实际转速的差值,利用pid控制算法分别得到两侧电机的反馈转矩,如下:
[0039][0040][0041]
式中,t
det1
、t
det2
——两侧电机的反馈转矩,单位:n
·
m;
[0042]nact1
、n
act2
——两侧电机的实际转速,单位:r/min;
[0043]kp1
、k
p2
——pid控制的比例系数;
[0044]ki1
、k
i2
——pid控制的积分系数;
[0045]kd1
、k
d2
——pid控制的微分系数。
[0046]
步骤四:进行转矩动态约束,包括:电机本身的转矩约束、电池组的功率约束以及转矩变化率约束等。
[0047]
电机本身的转矩约束与其实际转速有关,如下:
[0048]
|t
req1
|≤t
max1
=f(n
act1
)
[0049]
|t
req2
|≤t
max2
=f(n
act2
)
[0050]
式中,t
max1
、t
max2
——两侧电机的最大转矩,取决于电机的外特性曲线。
[0051]
电池组的功率约束限制两个电机的总充放电功率,如下:
[0052][0053]
式中,p
bmin
、p
bmax
——电池组的最大充电功率和最大放电功率,单位:kw;η
b1
、η
b2
——电池组的充电效率和放电效率。
[0054]
转矩变化率约束用于限制转矩变化的快慢,避免出现转矩冲击和振动,如下:
[0055][0056][0057]
式中,t
n1
、t
m1
、t
n2
、
tm2
——电机转矩变化率的约束值,根据经验和实验调试得到。
[0058]
进一步的,所述双侧独立电驱动履带车电机转矩计算方法基于双侧独立电驱动履带车动力传动系统实现,所述双侧独立电驱动履带车动力传动系统包括:智能动力单元、高压电池、驱动电机控制器、驱动电机、减速器、整车控制器,所述驱动电机控制器包括左侧驱动电机控制器和右侧驱动电机控制器,所述驱动电机包括左侧驱动电机和右侧驱动电机,所述减速器包括左侧减速器和右侧减速器;
[0059]
所述智能动力单元用于为高压电池和驱动电机提供电能;
[0060]
所述高压电池用于为驱动电机控制器提供电能,并在驱动电机处于制动工况时进行制动能量回收;
[0061]
所述左侧驱动电机控制器用于接收整车控制器命令,控制左侧驱动电机工作,并
将来自智能动力单元/高压电池的直流电转换为三相交流电;
[0062]
所述右侧驱动电机控制器用于接收整车控制器的命令,控制右侧驱动电机工作,并将来自智能动力单元/高压电池的直流电转换为三相交流电;
[0063]
所述左侧驱动电机和右侧驱动电机执行来自左侧驱动电机控制器和右侧驱动电机控制器的命令,将电能转换为机械能,输出机械功率;
[0064]
所述左侧减速器和右侧减速器将来自左侧驱动电机和右侧驱动电机的机械能降速增扭后传递到左右主动轮,从而驱动车辆行进。
[0065]
与现有技术相比,本发明的有益效果为:
[0066]
本发明一种基于前馈和反馈的双侧独立电驱动履带车电机转矩计算方法,实现了根据期望车速和期望曲率得到驱动电机的期望转速;再根据驱动电机转速计算得到稳态条件下驱动电机的期望转矩,即前馈转矩;然后根据电机期望转速与实际转速的差值利用pid控制得到其补偿转矩,即反馈转矩;最后,根据电机本身的转矩约束、电池组的功率约束以及转矩变化率约束等,得到驱动电机的实际控制转矩。能够应用于无人平台,针对不同行车工况提高驱动电机扭矩的自适应性,提高整车响应能力,降低超调量。
附图说明
[0067]
图1为本发明的双侧独立电驱动履带车电机转矩计算方法架构示意图。
[0068]
图2为本发明的双侧独立电驱动履带车动力传动系统示意图。
[0069]
图中:1、智能动力单元;2、高压电池;3、左侧驱动电机控制器;4、左侧驱动电机;5、左侧减速器;6、右侧驱动电机控制器;7、右侧驱动电机;8、右侧减速器;9、整车控制器。
具体实施方式
[0070]
下面结合本发明实施例中的附图,对本发明的技术方案进行清楚、完整地描述。
[0071]
如图1所示,双侧独立电驱动履带车电机转矩计算方法,其上层接口为车速、曲率、档位、模式,下层接口为驱动电机目标转矩,上层接口接受来自遥控系统/自主驾驶系统控制指令,包括车速、曲率、档位、模式四个信号,车速信号为整车目标纵向车速;曲率信号为整车目标曲率;档位信号包括空挡、前进挡、后退档和中心转向档;模式包括普通模式和越野模式,普通模式用于正常行车使用,越野模式用于特种工况使用,如35度纵坡、垂直墙、壕沟、高速行驶及中心转向等;
[0072]
下层接口为整车控制器根据当前控制指令和整车实际状态计算最优的转矩,并下发给驱动电机控制器的目标转矩,包括:期望转速计算、前馈转矩计算、反馈转矩计算以及动态转矩约束。
[0073]
转矩计算步骤如下:
[0074]
步骤一:进行期望转速计算,根据两侧电机的转速,可以计算得到车速和曲率,如下:
[0075][0076]
[0077]
式中:v——车速,单位:km/h;
[0078]
n1、n2——两侧驱动电机转速,单位:r/min;
[0079]rz
——驱动轮有效半径,单位:m;
[0080]
ic——电机到驱动轮减速比;
[0081]
ρ——曲率,单位:1/m;
[0082]
b——履带中心距,单位:m。
[0083]
根据上述公式,可以计算得到两侧电机期望转速与期望车速、期望曲率的关系,如下:
[0084][0085][0086]
式中,n
req1
、n
req2
——两侧电机期望转速,单位:r/min;
[0087]vreq
——期望车速,单位:km/h;
[0088]
ρ
req
——期望曲率,单位:1/m。
[0089]
步骤二:进行前馈转矩计算,根据两侧电机的期望转速,可以得到稳态条件下两电机的期望转矩,作为转矩控制算法中的前馈转矩。根据期望曲率的不同,前馈转矩的计算公式有所不同,如下:
[0090]
如果ρ
req
《2/b,则有:
[0091][0092][0093]
如果ρ
req
≥2/b,则有:
[0094][0095][0096]
式中,t
req1
、t
req2
——两侧电机的前馈转矩,单位:n
·
m;
[0097]
f——路面滚动阻力系数;
[0098]
μ——路面转向阻力系数;
[0099]
l——履带接地长,单位:m。
[0100]
步骤三:进行反馈转矩计算,根据电机的期望转速与实际转速的差值,利用pid控制算法分别得到两侧电机的反馈转矩,如下:
[0101][0102][0103]
式中,t
det1
、t
det2
——两侧电机的反馈转矩,单位:n
·
m;
[0104]nact1
、n
act2
——两侧电机的实际转速,单位:r/min;
[0105]kp1
、k
p2
——pid控制的比例系数;
[0106]ki1
、k
i2
——pid控制的积分系数;
[0107]kd1
、k
d2
——pid控制的微分系数。
[0108]
步骤四:进行转矩动态约束,为了保证整车系统运行的稳定性和可靠性,需要对驱动电机的转矩进行限制,包括:电机本身的转矩约束、电池组的功率约束以及转矩变化率约束等。
[0109]
电机本身的转矩约束与其实际转速有关,如下:
[0110]
|t
req1
|≤t
max1
=f(n
act1
)
[0111]
|t
req2
|≤t
max2
=f(n
act2
)
[0112]
式中,t
max1
、t
max2
——两侧电机的最大转矩,取决于电机的外特性曲线。
[0113]
电池组的功率约束限制两个电机的总充放电功率,如下:
[0114][0115]
式中,p
bmin
、p
bmax
——电池组的最大充电功率和最大放电功率,单位:kw;η
b1
、η
b2
——电池组的充电效率和放电效率。
[0116]
转矩变化率约束用于限制转矩变化的快慢,避免出现转矩冲击和振动,如下:
[0117][0118][0119]
式中,t
n1
、t
m1
、t
n2
、t
m2
——电机转矩变化率的约束值,根据经验和实验调试得到。
[0120]
请参阅图2,本发明的双侧独立电驱动履带车电机转矩计算方法是基于双侧独立电驱动履带车动力传动系统实现,双侧独立电驱动履带车动力传动系统包括:智能动力单元1、高压电池2、驱动电机控制器、驱动电机、减速器、整车控制器9,驱动电机控制器包括左侧驱动电机控制器3和右侧驱动电机控制器6,驱动电机包括左侧驱动电机4和右侧驱动电机7,减速器包括左侧减速器5和右侧减速器8;
[0121]
因为智能动力单元(ipu)集成ecu控制,所以智能动力单元1具备发电和能量回收功能,智能动力单元1用于为高压电池2和驱动电机提供电能,高压电池2用于为驱动电机控制器提供电能,并在驱动电机处于制动工况时进行制动能量回收。
[0122]
为了满足电驱动履带车的工作转矩需求,驱动电机采用启动转矩大的三相电机,左侧驱动电机控制器3用于接收整车控制器9命令,控制左侧驱动电机4工作,并将来自智能动力单元1/高压电池2的直流电转换为三相交流电;右侧驱动电机控制器6用于接收整车控制器9的命令,控制右侧驱动电机7工作,并将来自智能动力单元1/高压电池2的直流电转换为三相交流电。
[0123]
左侧驱动电机4和右侧驱动电机7执行来自左侧驱动电机控制器3和右侧驱动电机控制器6的命令,将电能转换为机械能,输出机械功率;左侧减速器5和右侧减速器8将来自左侧驱动电机4和右侧驱动电机7的机械能降速增扭后传递到左右主动轮,从而驱动车辆行进。
[0124]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,应当指出的是,对于本领域的技术人员来说,在不脱离本发明构思的前提下,进行变化、改
型或添加,都应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1