集成支架以及定位导航系统的制作方法
1.本技术涉及无人车定位导航系统组装技术领域,具体而言,涉及一种集成支架以及定位导航系统。
背景技术:
2.在固态雷达技术应用中,定位导航系统包括多个固态雷达和相机支架,通过固态雷达来进行障碍物探测,通过相机来探测车身周围环境并对预设的标记物进行识别。将固态雷达和相机固定安装于车身时,需要固态雷达和相机经长时间使用后仍不会发生相对于车身的位置偏移或者松动,以保证整车定位导航性能正常。
3.目前,通用的固定方法为结合车身形状单独设计与固态雷达、相机匹配的支架,再通过对应的支架分别将固态雷达和相机装配于车身。该种固定方法不仅装配麻烦,且需要单独进行支架设计和制造,并各自保证其装配精度,使其子坐标系与理论子坐标系不发生较大偏差。尤其是,在车身的前后两侧,固态雷达和相机的预设安装位置较近,如果单独设计支架,会占据较大的空间,组装非常不便。
技术实现要素:
4.为此,本技术的目的在于提出一种集成支架以及定位导航系统,构造简单,易于制造,使用集成支架将固态雷达和相机同时安装于车身,能够保证固态雷达和相机的安装精度,且能够充分利用固态雷达的视域和相机的视域,进而保证了定位导航系统的探测性能良好稳定。
5.本技术的一些实施例提出一种集成支架,包括:基板,用于安装于车身;雷达支架,固定于所述基板,所述雷达支架具有雷达安装部,所述雷达安装部相对于所述基板倾斜设置,所述雷达安装部用于安装固态雷达,以使所述固态雷达的视域的上临界面与所述基板平行;相机支架,固定于所述基板,所述相机支架具有至少一个相机安装部,所述相机安装部与所述基板相互垂直,所述相机安装部用于安装相机,以使所述相机的视域中心线与所述基板平行。
6.相对于传统的将固态雷达和相机分别使用支架固定于车身的形式,本技术实施例中的集成支架构造简单,易于制造。一方面,能够同时安装固态雷达和相机于车身,不仅简化了固态雷达和相机的组装过程,能够保证固态雷达、相机安装于车身时相对于imu的位置精度,另一方面,还能够充分利用固态雷达的视域和相机的视域,当基板水平安装于车顶时,使固态雷达的视域中心线朝下倾斜,相机的视域中心线水平延伸,进而保证定位导航系统的探测性能良好稳定。
7.另外,根据本技术实施例的集成支架还具有如下附加的技术特征:
8.根据本技术的一些实施例,所述雷达安装部的法线方向与所述基板的法线方向之间的夹角为35
±5°
。通过该种形式,能够将固态雷达倾斜安装,使固态雷达的视域中心线向下倾斜,使固态雷达的视域的上临界面水平。
9.根据本技术的一些实施例,所述雷达支架包括:第一固定板,所述第一固定板固定于所述基板;两个竖向支撑板,所述两个竖向支撑板从所述第一固定板的长度方向的两端垂直向上延伸,每个竖向支撑板的远离所述第一固定板的一端向靠近另一个竖向支撑板的方向弯折形成雷达安装板,所述两个雷达安装板共同形成所述雷达安装部且用于共同安装固态雷达。该种形式的雷达支架构造简单,易于制造。
10.根据本技术的一些实施例,所述雷达支架还包括:加强板,所述加强板位于所述雷达安装板的远离所述固态雷达的一侧,所述加强板的远离所述雷达安装板的一侧设有加强肋结构;螺纹件,用于从所述加强板的远离所述雷达安装板的一侧依次贯穿所述加强板、所述雷达安装部后拧入固态雷达,以将所述固态雷达固定于所述雷达安装部。通过设置加强板,能够承受固态雷达的重量,牢固支撑固态雷达于预设位置。
11.根据本技术的一些实施例,所述相机支架包括:相机安装板,包括至少一个所述相机安装部且用于安装相机;两个竖向固定臂,所述两个竖向固定臂于所述相机安装板的长度方向上的两端向后延伸,每个竖向固定臂的远离所述相机安装板的一端向靠近另一个竖向固定臂的方向弯折形成第二固定板,所述两个竖向固定臂的第二固定板固定于所述基板。该种形式的相机支架构造简单,易于制造。
12.根据本技术的一些实施例,所述相机安装板包括两个相机安装部,所述两个相机安装部沿所述相机安装板的长度方向间隔布置,每个相机安装部用于安装一个相机。通过该种形式,能够集成安装两个相机,拓展定位导航系统的探测区域。
13.根据本技术的一些实施例,所述雷达安装部布置于所述两个相机安装部之间。通过该种形式,能够将两个相机分别布置于固态雷达的两侧,既能够使用一个固态雷达充分探测,又能够合理布置两个相机的位置,以观察固态雷达两侧的环境,从而减少探测盲区。
14.根据本技术的一些实施例,所述两个竖向固定臂之间具有安装空间,所述雷达支架布置于所述安装空间,所述相机安装板设有供固态雷达穿过的避让孔。该种形式能够合理利用空间,使集成支架结构紧凑。
15.根据本技术的一些实施例,所述基板、所述雷达支架和所述相机支架的材质均为钣金件,易于制造,成本低廉。
16.本技术的一些实施例还提出一种定位导航系统,包括固态雷达、相机和上述的集成支架。
17.本技术实施例中的定位导航系统能够保证前后两侧的雷达和支架安装于预设位置,从而具有稳定良好的探测性能。
18.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
19.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
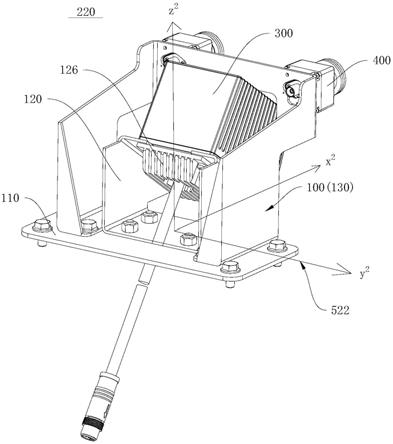
20.图1为本技术实施例提供的定位导航系统中前侧雷达相机集成组件的一种视角的
结构示意图;
21.图2为本技术实施例提供的集成支架的结构示意图;
22.图3为本技术实施例提供的集成支架中基板的结构示意图;
23.图4为本技术实施例提供的集成支架中雷达支架的结构示意图;
24.图5为本技术实施例提供的集成支架中加强板的结构示意图;
25.图6为本技术实施例提供的集成支架中相机支架的结构示意图;
26.图7为本技术实施例提供的集成支架所应用的固态雷达的结构示意图;
27.图8为本技术实施例提供的集成支架所应用的相机的结构示意图;
28.图9为本技术实施例提供的定位导航系统的示意图;
29.图10为本技术实施例提供的定位导航系统中前侧雷达相机集成组件的另一种视角的结构示意图。
30.图标:100
‑
集成支架;110
‑
基板;112
‑
基板第二面;113
‑
车身安装孔;114
‑
第一安装孔;115
‑
第二安装孔;120
‑
雷达支架;121
‑
第一固定板;1211
‑
a端;1212
‑
b端;122
‑
第一竖向支撑板;1221
‑
竖向支撑板本体;1222
‑
雷达安装板;1223
‑
雷达安装侧;1224
‑
加强板安装侧;123
‑
第二竖向支撑板;124
‑
第三安装孔;125
‑
第五安装孔;126
‑
加强板;1261
‑
第七安装孔;1262
‑
加强肋结构;1263
‑
过孔;1264
‑
加强板背面;1265
‑
加强板正面;127
‑
螺纹件;128
‑
雷达安装部;130
‑
相机支架;131
‑
相机安装板;1311
‑
c端;1312
‑
d端;132
‑
第一竖向固定臂;1321
‑
竖向固定臂本体;1322
‑
第二固定板;1323
‑
第四安装孔;133
‑
第二竖向固定臂;134
‑
相机安装部;1341
‑
镂空部;1342
‑
第六安装孔;135
‑
避让孔;136
‑
安装空间;200
‑
定位导航系统;210
‑
imu;220
‑
前侧雷达相机集成组件;230
‑
后侧雷达相机集成组件;240
‑
左后雷达组件;250
‑
右后雷达组件;260
‑
左前相机组件;270
‑
右前相机组件;300
‑
固态雷达;310
‑
雷达尾部;320
‑
雷达安装孔;330
‑
雷达视域中心线;340
‑
雷达视域上临界面;350
‑
雷达视域下临界面;400
‑
相机;410
‑
相机尾部;420
‑
相机安装孔;430
‑
相机视域中心线;440
‑
相机视域临界面;500
‑
总坐标系;510
‑
集成支架坐标系;522
‑
基板子坐标系;531
‑
雷达支架总坐标系;532
‑
雷达支架子坐标系;541
‑
相机支架总坐标系;542
‑
相机支架子坐标系;550
‑
雷达总坐标系;560
‑
相机总坐标系。
具体实施方式
31.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
32.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
33.请参照图9,本技术实施例提出一种定位导航系统200,用于车辆的自动化定位导航,包括imu210、前侧雷达相机集成组件220、后侧雷达相机集成组件230、左后雷达组件240、右后雷达组件250、左前相机组件260和右前相机组件270。其中,imu210预设有定位导
航系统200的总坐标系500以及总坐标原点,其他各组件分别对车身环境和位置进行探测,imu210收集其他各组件反馈的代表车身环境和位置的信号,并判断出车辆的坐标位置和环境。为了保证定位导航系统200的探测性能良好稳定,保证其他各组件相对于imu210的位置精度非常重要,尤其是前侧雷达相机集成组件220和后侧雷达相机集成组件230。
34.在本技术的一些实施例中,前侧雷达相机集成组件220和后侧雷达相机集成组件230构造相同。
35.请参照图1,以前侧雷达相机集成组件220为例,前侧雷达相机集成组件220包括集成支架100、固态雷达300和相机400,集成支架100固定于车身,固态雷达300和相机400均固定于集成支架100上。如果前侧雷达相机集成组件220中固态雷达300和相机400相对于imu210的实际安装位置与理论设计位置差别较大,将导致辆行驶过程中探测车前侧的位置和环境出现位置偏差和探测盲区,进一步对定位导航系统200的探测性能造成较大影响。
36.请参照图2,本技术实施例的集成支架100,包括基板110、雷达支架120和相机支架130。基板110用于安装于车身,雷达支架120和相机支架130均固定于基板110,雷达支架120具有雷达安装部128,雷达安装部128相对于基板110倾斜设置,雷达安装部128用于安装固态雷达300,以使固态雷达300的雷达视域上临界面340与基板110平行;相机支架130具有至少一个相机安装部134,相机安装部134与基板110相互垂直,每个相机安装部134用于安装一个相机400,以使相机400的相机视域中心线430与基板110平行。
37.相对于传统的将固态雷达300和相机400分别使用支架固定于车身的形式,本技术实施例中的集成支架100构造简单,易于制造。一方面,能够同时安装固态雷达300和相机400于车身,简化了固态雷达300和相机400的组装过程,还能够保证固态雷达、相机400安装于车身时相对于imu210的位置精度;另一方面,还能够充分利用固态雷达300的视域和相机400的视域,当基板110水平安装于车顶时,使固态雷达300的视域中心线朝下倾斜,相机400的视域中心线水平延伸,进而保证定位导航系统200的探测性能良好稳定。
38.下述本技术实施例的集成支架100的各部件的结构与相互连接关系。
39.请参照图10,固态雷达300的雷达视域中心线330朝下倾斜,雷达视域上临界面340和雷达视域下临界面350分别位于雷达视域中心线330的上下两侧。
40.固态雷达300用于探测在视域范围内是否有障碍物,以避免车辆在行驶过程中撞到障碍物。雷达视域上临界面340调整至与水平线齐平,能够充分利用固态雷达300的视域范围。
41.请参照图10,在本技术的一些实施例中,雷达安装部128的法线方向与基板110的法线方向之间的夹角为β=35
±5°
。固态雷达300的型号为大疆mid
‑
70,雷达视域上临界面340与雷达视域中心线330之间的夹角α=35
°
。将固态雷达300安装于雷达安装部128,将基板110水平安装于车顶后,能够使雷达视域上临界面340与水平线平齐,雷达视域下临界面350靠近车身。
42.通过该种形式,能够将固态雷达300倾斜安装,使雷达视域中心线330向下倾斜,从而使雷达视域上临界面340水平。
43.在其他实施例中,β角度可以根据具体使用的固态雷达300的规格灵活调整,以使雷达视域上临界面340水平延伸。
44.请参照图10,相机400用于监控并识别信号标识,以辅助自动导航。相机安装部134
与基板110相互垂直,以使相机视域中心线430与基板110平行,当基板110水平安装于车顶后,相机视域临界面440相对于水平延伸的相机视域中心线430对称布置。
45.请参照图3,基板110在厚度方向上的两侧分别包括基板第一面(图中没有标出)和基板第二面112,基板第一面用于与车身贴合,基板第二面112用于雷达支架120和安装相机支架130。
46.基板110包括多个车身安装孔113、多个第一安装孔114和多个第二安装孔115。
47.多个车身安装孔113用于配合螺栓、螺母等以将基板110固定于车身,多个第一安装孔114用于安装雷达支架120,多个第二安装孔115用于安装相机支架130。
48.其中,基板110、雷达支架120和相机支架130均为单独制造的部件。相对于一体成型的形式,将集成支架100拆分成基板110、雷达支架120和相机支架130,分别制造后组装成型,不仅简化了每个部件的构造,降低了制造成本,还能够简化坐标系体系的计算。
49.在本技术的一些实施例中,基板110为规整的矩形板,并具有基板总坐标系(图中没有标出)和基板子坐标系522,基板110安装于车身后,基板总坐标系与车身上安装集成支架100的集成支架坐标系510重合,基板子坐标系522用于安装雷达支架120和相机支架130。
50.其中,当基板110安装于车身后,基板子坐标系522的x2y2平面与水平面平齐。
51.在其他实施例中,基板110也可以为圆形板等其他规则形状,既便于制造,又便于坐标系体系的计算。
52.在本技术的一些实施例中,多个车身安装孔113相对于基板110的中心(即z2轴)周向间隔布置,多个第一安装孔114的布置区域位于多个第二安装孔115的布置区域之内,即多个第二安装孔115组成的轮廓包括多个第一安装孔114组成的轮廓。多个第二安装孔115相对于基板110的中面(即x2z2平面)对称布置,多个第一安装孔114也相对于基板110的中面对称布置。
53.通过该种形式,能够使固态雷达300和相机400均使用基板子坐标系522进行装配,以简化坐标系体系的计算。
54.在其他实施例中,固态雷达300和相机400也可以分别使用一个子坐标系。
55.作为一种示例形式,车身安装孔113的数量为四个,分别位于矩形的基板110的四角。第一安装孔114的数量为四个,第二安装孔115的数量为四个,四个第一安装孔114构成的矩形轮廓位于四个第二安装孔115构成的矩形轮廓之内。
56.通过该种形式,使得基板110与车身、雷达支架120和相机支架130的固定处规整,不仅构造简单,还利于制造。
57.请参照图4,雷达支架120包括第一固定板121和两个竖向支撑板,两个竖向支撑板分别为第一竖向支撑板122和第二竖向支撑板123。
58.第一固定板121的长度方向(即y3方向)的两端分别为a端1211和b端1212,第一竖向支撑板122从a端1211垂直向上延伸,第二竖向支撑板123从b端1212垂直向上延伸。第一竖向支撑板122和第二竖向支撑板123的构造相同且相对设置。
59.以第一竖向支撑板122为例,第一竖向支撑板122包括竖向支撑板本体1221和雷达安装板1222,竖向支撑板本体1221的一端与a端1211相连,另一端相连有雷达安装板1222,雷达安装板1222向靠近第二竖向支撑板123的方向弯折,第一竖向支撑板122的雷达安装板1222和第二竖向支撑板123的雷达安装板(图中没有标出)共同形成雷达安装部128,用于共
同安装固态雷达300。
60.雷达安装部128包括四个第五安装孔125,其中两个第五安装孔125位于第一竖向支撑板122的雷达安装板1222,另外两个第五安装孔125位于第二竖向支撑板123的雷达安装板,四个第五安装孔125相对于雷达安装部的中心(即雷达支架子坐标系532的z4轴)周向间隔布置。
61.第一固定板121包括多个第三安装孔124,第三安装孔124与第一安装孔114一一对应。
62.具体而言,第三安装孔124数量有四个,四个第三安装孔124均布置于第一固定板121上,当第一固定板121与基板第二面112贴合后,对准第三安装孔124和对应的第一安装孔114,使用螺纹件配合螺母锁紧,以将雷达支架120固定于基板110。
63.请参照图4,雷达支架120包括雷达支架总坐标系531和雷达支架子坐标系532。请参照图3和图7,当雷达支架120安装于基板110时,雷达支架总坐标系531和基板子坐标系522对应,雷达支架子坐标系532与固态雷达300的雷达总坐标系550重合。
64.在本技术的一些实施例中,雷达支架总坐标系531的原点在基板子坐标系522的x2轴上发生偏移,以便于坐标系体系的计算。
65.在其他实施例中,也可以将雷达支架总坐标系531和基板子坐标系522完全重合,或者以其他方式进行雷达支架总坐标系531的原点的位置偏移。
66.请参照图1和图5,可选地,雷达支架120还包括加强板126和螺纹件127。雷达安装板1222包括雷达安装侧1223和加强板安装侧1224,雷达安装侧1223用于布置固态雷达300,加强板安装侧1224用于布置加强板126。加强板126包括加强板背面1264和加强板正面1265,加强板正面1265与加强板安装侧1224贴合,加强板背面1264为远离雷达安装板1222的一侧且设有加强肋结构1262。
67.进一步地,加强板126上设有与第五安装孔125一一对应的第七安装孔1261。螺纹件127与第五安装孔125一一对应,使用螺纹件127从加强板背面1264依次贯穿加强板126、雷达安装板1222后拧入固态雷达300的雷达安装孔320,以将固态雷达300固定于雷达安装部128。
68.可选地,加强板126设有过孔1263,用于供固态雷达300的雷达尾部310穿过。雷达尾部310为固态雷达300的线束端,用于与其他部件信号连接。
69.请参照图6,相机支架130包括相机安装板131和两个竖向固定臂,两个竖向固定臂分别为第一竖向固定臂132和第二竖向固定臂133。相机安装板131包括至少一个相机安装部134且用于安装相机400。
70.相机安装部134包括镂空部1341和两个第六安装孔1342,两个第六安装孔1342位于相机安装板131,且相对于相机安装部134的中心(即相机支架子坐标系542的x6轴)周向间隔布置。镂空部1341用于供相机尾部410穿过,第六安装孔1342与相机400的相机安装孔420一一对应,使用螺栓穿过第六安装孔1342后拧入对应的相机安装孔420,以将相机400固定于相机安装部134。
71.请参照图2,进一步地,雷达安装部128布置于所述两个相机安装部134之间。
72.通过该种形式,能够将两个相机400分别布置于固态雷达300的两侧,既能够使用一个固态雷达300充分探测障碍物,又能够合理布置两个相机400的位置,以观察固态雷达
300两侧的环境,从而减少探测盲区。
73.请参照图2,在本技术的一些实施例中,第一竖向固定臂132和第二竖向固定臂133之间具有安装空间136,雷达支架120布置于安装空间136,相机安装板131设有供固态雷达300穿过的避让孔135。该种形式能够合理利用空间,使集成支架100结构紧凑,且使相机支架130具有较好的强度。
74.在其他实施例中,也可以在第一竖向固定臂132和第二竖向固定臂133上分别设置一个相机安装板,每个相机安装板设置一个相机安装部134,以保证相机400和固态雷达300的相对位置。
75.在本技术的一些实施例中,相机安装部134设置有两个,两个相机安装部134沿相机安装板131的长度方向间隔布置,每个相机安装部134用于安装一个相机400。
76.在其他实施例中,相机安装部134的数量也可以为一个或者多个,以安装预设数量的相机400。
77.请参照图6,相机安装板131在长度方向(即y6轴)上的两端分别为c端1311和d端1312,第一竖向固定臂132从c端1311向后延伸,第二竖向固定臂133从d端向后延伸。
78.第一竖向固定臂132和第二竖向固定臂133相对设置且构造相同,以第一竖向固定臂132为例,第一竖向固定臂132包括竖向固定臂本体1321和第二固定板1322,竖向固定臂本体1321的一端向第二竖向固定臂133的方向弯折形成第二固定板1322,另一端与c端1311相连,第二固定板1322上设有两个第四安装孔1323,第四安装孔1323与第二安装孔115一一对应。
79.同样的,第二竖向固定臂133也包括一个第二固定板,该第二固定板上也包括两个第四安装孔1323,第一竖向固定臂132的第二固定板1322和第二竖向固定臂133的第二固定板共同固定于基板第二面112,四个第四安装孔1323绕相机支架130的中心线(即相机支架总坐标系541的z5轴)周向间隔布置。
80.请参照图3和图6,相机支架130包括相机支架总坐标系541和至少一个相机支架子坐标系542,相机支架子坐标系542位于相机安装部134,与相机400一一对应。
81.请参照图6和图8,当相机支架130固定于基板110后,相机支架总坐标系541与基板子坐标系522对应,相机支架子坐标系542与安装于相机安装部134的相机400的相机总坐标系560重合。
82.在本技术的一些实施例中,基板110、雷达支架120和相机支架130均为钣金件,易于制造,成本低廉。
83.在其他实施例中,基板110、雷达支架120和相机支架130也可以为塑料件,例如pa、pp材料等,重量较轻,强度也较高。
84.在本技术的一些实施例中,基板总坐标系、基板子坐标系522、雷达支架总坐标系531、雷达支架子坐标系532、相机支架总坐标系541的xz平面共属于同一平面,相机支架子坐标系542与相机支架总坐标系541的xz平面平行,以提高整个集成支架100的规整度。
85.在其他实施例中,也可以根据相机400和固态雷达300的预设安装位置灵活调整雷达支架子坐标系532和相机支架子坐标系542的位置。
86.本技术实施例中的集成支架100的坐标系体系的设计原理如下:
87.请参照图9,imu210预设有定位导航系统200的总坐标系500以及总坐标原点,并预
设有安装集成支架100的集成支架坐标系510;
88.集成支架100安装于车身,使基板总坐标系与集成支架坐标系510重合;
89.请参照图3和图4,雷达支架120安装于基板110,使雷达支架总坐标系531与基板子坐标系522对应;
90.请参照图4和图7,固态雷达300安装于雷达安装部128,使雷达支架子坐标系532与雷达总坐标系550重合,此时雷达总坐标系550相对于总坐标系500的位置是精准的,所安装的固态雷达300相对于车身的位置也是精准的;
91.请参照图3和图6,相机支架130安装于基板110,使相机支架总坐标系541与基板子坐标系522对应;
92.请参照图6和图8,两个相机400分别安装于两个相机安装部134,每个相机支架子坐标系542与对应的相机400的相机总坐标系560重合,此时每个相机总坐标系560相对于总坐标系500的位置是精准的,所安装的相机400相对于车身的位置也是精准的。
93.使用本技术实施例中的集成支架100将固态雷达300和相机400同时安装在车身上,不仅简化了固态雷达300和相机400的组装过程,还能够保证固态雷达300、相机400安装于imu210的位置精度,且能够充分利用固态雷达300的视域和相机400的视域,进而保证定位导航系统200的探测性能良好稳定。
94.需要说明的是,在不冲突的情况下,本技术中的实施例中的特征可以相互结合。
95.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1