线控底盘运动控制系统的制作方法
1.本实用新型实施例涉及无人驾驶技术领域,尤其涉及一种线控底盘运动控制系统。
背景技术:
2.随着无人驾驶技术的高速发展和日渐成熟,无人驾驶技术中包含的感知层、决策层、控制层和执行层均成为行业研究的热点方向。支持无人驾驶车辆的线控底盘系统技术方案的研究也越来越多,同时也涌现出各种不同的研究成果。但常见的线控底盘系统技术主要是基于传统车辆的底盘进行改装,将传统的制动、转向及驱动系统通过加装伺服电机的方式实现线控。
3.通过此种方式改装成的线控底盘存在改装困难、控制精度较低,可靠性差,且不易于实现批量化生产,很难达到量产的要求。
4.因此,亟需一种线控底盘运动控制系统,以实现提高控制精度且易于产量化的目的。
技术实现要素:
5.本实用新型提供一种线控底盘运动控制系统,以实现提高控制精度且易于产量化的目的。
6.第一方面,本实用新型实施例提供了一种线控底盘运动控制系统,包括:
7.环境感知子系统、线控驱动子系统、线控制动子系统、线控转向子系统、线控举升子系统、整车电气子系统和整车控制中心;其中,所述环境感知子系统与所述整车控制中心电性连接;所述线控驱动子系统与所述整车控制中心电性连接;所述线控制动子系统与所述整车控制中心电性连接;所述线控转向子系统与所述整车控制中心电性连接;所述线控举升子系统与所述整车控制中心电性连接;所述整车电气子系统与所述整车控制中心电性连接;
8.所述环境感知子系统,用于构建环境地图,并发送环境信号至所述整车控制中心;
9.所述线控驱动子系统,用于根据第一指令自动驱动车辆行驶,其中,所述第一指令是由所述整车控制中心发送至所述线控驱动子系统的;
10.所述线控制动子系统,用于根据第二指令自动制动车辆,其中,所述第二指令是由所述整车控制中心发送至所述线控制动子系统的;
11.所述线控转向子系统,用于根据第三指令在自动驾驶状态下,对车辆进行转向,其中,所述第三指令是由所述整车控制中心发送至所述线控转向子系统的;
12.所述线控举升子系统,用于根据第四指令控制举升阀驱动举升缸,以使所述举升缸倾倒液压油箱内的液压油;其中,所述第四指令是由所述整车控制中心发送至所述线控举升子系统的;
13.所述整车电气子系统,用于控制车辆内部的电气设备。
14.第二方面,本实用新型实施例还提供了一种线控底盘运动控制方法,由线控底盘运动控制系统执行,所述线控底盘运动控制系统包括环境感知子系统、线控驱动子系统、线控制动子系统、线控转向子系统、线控举升子系统、整车电气子系统和整车控制中心,所述方法包括:
15.通过所述环境感知子系统构建环境地图,并发送环境信号至所述整车控制中心;
16.通过所述线控驱动子系统根据第一指令自动驱动车辆行驶,其中,所述第一指令是由所述整车控制中心发送至所述线控驱动子系统的;
17.通过所述线控制动子系统根据第二指令自动制动车辆,其中,所述第二指令是由所述整车控制中心发送至所述线控制动子系统的;
18.通过所述线控转向子系统根据第三指令在自动驾驶状态下,对车辆进行转向,其中,所述第三指令是由所述整车控制中心发送至所述线控转向子系统的;
19.通过所述线控举升子系统根据第四指令控制举升阀驱动举升缸,以使所述举升缸倾倒液压油箱内的液压油;其中,所述第四指令是由所述整车控制中心发送至所述线控举升子系统的;
20.通过所述整车电气子系统控制车辆内部的电气设备。
21.本实用新型实施例提供一种线控底盘运动控制系统,包括:环境感知子系统、线控驱动子系统、线控制动子系统、线控转向子系统、线控举升子系统、整车电气子系统和整车控制中心。采用上述技术手段能够实现提高车辆控制精度且易于产量化的目的。
附图说明
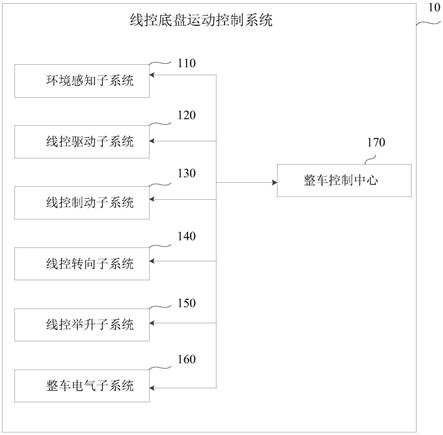
22.图1a是本实用新型实施例一中提供的一种线控底盘运动控制系统的架构示意图;
23.图1b是本实用新型实施例一中提供的一种线控驱动子系统的架构示意图;
24.图1c是本实用新型实施例一中提供的一种线控制动子系统的架构示意图;
25.图1d是本实用新型实施例一中提供的一种线控转向子系统的架构示意图;
26.图1e是本实用新型实施例一中提供的一种线控举升子系统的架构示意图;
27.图1f是本实用新型实施例一中提供的一种整车控制中心的架构示意图;
28.图2是本实用新型实施例二中提供的一种线控底盘运动控制方法的流程示意图。
具体实施方式
29.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
30.在更加详细地讨论示例性实施例之前应当提到的是,一些示例性实施例被描述成作为流程图描绘的处理或方法。虽然流程图将各步骤描述成顺序的处理,但是其中的许多步骤可以被并行地、并发地或者同时实施。此外,各步骤的顺序可以被重新安排。当其操作完成时所述处理可以被终止,但是还可以具有未包括在附图中的附加步骤。所述处理可以对应于方法、函数、规程、子例程、子程序等。
31.实施例一
32.图1a是本实用新型实施例一中提供的一种线控底盘运动控制系统10的架构示意
图,本实施例可适用于控制无人驾驶车辆的情况,该系统包括:环境感知子系统110、线控驱动子系统120、线控制动子系统130、线控转向子系统140、线控举升子系统150、整车电气子系统160和整车控制中心170;其中,所述环境感知子系统110与所述整车控制中心170电性连接;所述线控驱动子系统120与所述整车控制中心170电性连接;所述线控制动子系统130与所述整车控制中心170电性连接;所述线控转向子系统140与所述整车控制中心170电性连接;所述线控举升子系统150与所述整车控制中心170电性连接;所述整车电气子系统160与所述整车控制中心170电性连接。
33.所述环境感知子系统110,用于构建环境地图,并发送环境信号至所述整车控制中心170。
34.本实施例中,可选的,所述环境感知子系统110包括激光传感器或雷达传感器。
35.环境感知子系统110用于感知周围的环境信息,能够通过搭载的激光传感器或雷达对周围的环境进行距离探测。示例性的,通过激光传感器能够探测车辆的前方是否遇到障碍物,并根据探测后的结果构建环境地图,其中,环境地图中包括道路和障碍物。本实施例中,整车控制中心170是用于接收各个子系统的信号,并根据子系统的信号发送指令,以控制车辆执行指令。
36.所述线控驱动子系统120,用于根据第一指令自动驱动车辆行驶,其中,所述第一指令是由所述整车控制中心170发送至所述线控驱动子系统120的。
37.本实施例中,所述线控驱动子系统120包括发动机1210、自动变速箱1211、电控系统1212和传动系统1213;所述发动机1210、所述自动变速箱1211、所述电控系统1212与所述传动系统1213电性连接。具体的,可以参见图1b示出的一种线控驱动子系统的架构示意图。
38.本实施例中,整车控制中心170发送第一指令至电控系统1212,其中,第一指令中包括油门信号,电控系统1212调整发动机1210以使发动机1210工作。其中,发动机1210和自动变速箱1211输入轴固定连接,自动变速箱1211输出轴和传动轴固定连接,自动变速箱1211输出轴和驱动桥并联,通过传动系统1213输出动力至车辆中后桥部分。进一步地,整车控制中心170能够根据车辆行驶的情况与自动变速箱1211进行通讯,进而调整自动变速箱1211的档位,以实现车辆的速度控制。
39.本实施例中,整车控制中心170接收到人工驾驶状态的信号后,电控系统1212和自动变速箱1211由人工进行操作控制。整车控制中心170接收到自动驾驶状态的信号后,整车控制中心170下发驾驶信号,驱动车辆进行前行。若在自动驾驶状态下,出现执行机构的目标信号与执行机构当前所处的状态不同的情况,则整车控制中心170将切换自动驾驶状态至人工驾驶状态。其中,执行机构包括方向盘、油门踏板和换挡手柄。本实施例中,不论整车控制中心170处于人工驾驶状态还是处于自动驾驶状态,若环境感知子系统110检测到车辆严重偏离道路或者出现比较大型的障碍物等情况,则整车控制中心170均会下发停车指令至线控驱动子系统120,以使线控驱动子系统120停止车辆的驱动,进而避免车辆出现驾驶状态之间的切换问题。具体的,整车控制中心170在减速时,通过与电控系统1212通讯并打开发动机1210缓速制动,进行制动减速,同时自动变速箱1211相应地调整所在档位。
40.进一步地,线控驱动子系统120能够根据轮胎管理系统的情况进行调整,具体的,轮胎管理系统的胎温胎压传感器检测到轮胎胎温胎压信号,并将轮胎胎温胎压信号发送至整车控制中心170。整车控制中心170判断胎温胎压是否超过临界值,若胎温胎压超出临界
值,则整车控制中心170控制线控驱动子系统120中的发动机1210缓速制动,并同时控制自动变速箱1211调整自动变速箱1211档位。其中,整车控制中心170在检测到胎温胎压异常时,会发送异常信号至语音报警器,以提示工作人员轮胎存在异常问题。
41.所述线控制动子系统130,用于根据第二指令自动制动车辆,其中,所述第二指令是由所述整车控制中心170发送至所述线控制动子系统130的;
42.本实施例中,可选的,所述线控制动子系统130包括电控制动系统1310、制动总阀1311、单模阀1312、双模阀1313、abs阀1314、apu1315、驻车制动阀1316、前轮转速传感器1317和踏板阀1318;其中,所述单模阀1312与所述abs阀1314串联;所述双模阀1313与所述abs阀1314串联;所述单模阀1312与所述双模阀1313并联;所述电控制动系统1310、所述制动总阀1311、所述单模阀1312、所述双模阀1313、所述abs阀1314、所述apu1315、所述驻车制动阀1316与所述前轮转速传感器1317电性连接。具体的,可以参见图1c示出的一种线控制动子系统的架构示意图。
43.本实施例中,apu(accelerated processing unit,加速处理器)具有高性能处理器和最新独立显卡的处理性能。本实施例中,环境感知子系统110在检测到周围环境中存在障碍物时,发送环境信号至整车控制中心170,整车控制中心170发送第二指令至线控制动子系统130。其中,第二指令包括减速指令。具体的,整车控制中心170下发第二指令至电控制动系统1310,电控制动系统1310接收指令后控制apu1315、单模阀1312、双模阀1313、abs阀1314和驻车制动阀1316进行制动。
44.本实施例中,电控制动系统1310由电瓶箱供电,能够接收整车控制中心170下发的第二指令,并可以下发开关量信号控制部分电磁阀。
45.本实施例中,单模阀1312由电控制动系统1310供电,能够接收电控制动系统1310的控制信号,其中,单模阀1312与前桥左右两侧的前轮转速传感器1317连接,能够接收前轮转速反馈信号,并根据前轮转速反馈信号进行调整。
46.本实施例中,双模阀1313由电控制动系统1310供电,能够接收电控制动系统1310的控制信号,其中,双模阀1313与后桥左右两侧的前轮转速传感器1317连接,能够接收前轮转速反馈信号,并根据前轮转速反馈信号进行调整。
47.本实施例中,踏板阀1318和abs阀1314由电控制动系统1310供电,接收电控制动系统1310下发的开关量信号。
48.所述线控转向子系统140,用于根据第三指令在自动驾驶状态下,对车辆进行转向,其中,所述第三指令是由所述整车控制中心170发送至所述线控转向子系统140的。
49.本实施例中,所述线控转向子系统140包括线控转向驱动器1410、线控方向盘1411、转向器1412、优先阀1413、双联泵1414、液压油箱1415、转向油缸1416和转角传感器1417;其中,所述线控转向驱动器1410与所述转向器1412电性连接;所述线控转向驱动器1410、所述转向器1412、所述优先阀1413、所述双联泵1414与所述液压油箱1415电性连接;所述转向器1412、所述转向油缸1416、所述转角传感器1417与所述线控方向盘1411电性连接。具体的,可以参见图1d示出的一种线控转向子系统的架构示意图。
50.本实施例中,在自动驾驶状态下,整车控制中心170根据车辆自身的姿态信息下发第三指令至线控转向子系统140中的线控转向驱动器1410,其中,第三指令包括目标转角信号。线控转向驱动器1410控制线控方向盘1411转动目标角度,液压油箱1415中液压油由双
联泵1414加压,经优先阀1413优先分配至转向器1412,进而通过转向器1412驱动转向油缸1416工作。在上述过程中,转角传感器1417实时检测前桥转角,并根据获取的转角信号调整线控方向盘1411进行转角控制。在人工驾驶状态下,线控方向盘1411是根据工作人员实际转动量调整转角的。
51.具体的,在线控转向驱动器1410未接收到第三指令时,双联泵1414从液压油箱1415吸油,前泵出油口给优先阀1413进油口供油。在线控转向驱动器1410接收到第三指令时,双联泵1414从液压油箱1415吸油,前泵出油口给优先阀1413进油口供油,转向器1412通过ls口控制优先阀1413出油口cf,同时调小优先阀1413出油口ef流量,优先保证优先阀1413出油口cf流量;液压油从转向器1412l口流入转向油缸1416,保证车辆转向。同时液压油从转向油缸1416r口流出,经过转向器1412r口,从转向器1412流回液压油箱1415。当转角传感器1417检测到输入转向角与实际转向角一致时,将转角信号反馈至线控方向盘1411,线控方向盘1411控制转向器1412保持转向角。
52.所述线控举升子系统150,用于根据第四指令控制举升阀驱动举升缸,以使所述举升缸倾倒液压油箱内的液压油;其中,所述第四指令是由所述整车控制中心170发送至所述线控举升子系统150的。
53.可选的,所述线控举升子系统150包括转向系统1510、优先阀1413、双联泵1414、液压油箱1415、举升缸1520、举升阀1530、气孔电磁阀1540和中央控制盒1550;其中,所述转向系统1510、所述优先阀1413、所述双联泵1414、所述液压油箱1415、所述举升阀1530、所述举升缸1520、所述气孔电磁阀1540与所述中央控制盒1550电性连接。具体的,可以参见图1e示出的一种线控举升子系统的架构示意图。
54.本实施例中,整车控制中心170发送第四指令,其中,第四指令包括远程指令,该远程指令是由工作人员下发至整车控制中心170的。整车控制中心170在接收到第四指令后,通过中央控制盒1550控制气孔电磁阀1540开闭,控制举升阀1530驱动举升缸1520,完成举升作业。在车辆处于停车状态且无转向的情况下,优先阀1413控制油路进行举升作业,液压油箱1415中的液压油,经双联泵1414加压至举升阀1530驱动举升缸1520作业。
55.在整车控制中心170未接收到第四指令时,双联泵1414从液压油箱1415吸油,后泵出油口给举升阀1530进油口(p)供油,气孔电磁阀1540保持1位,举升阀1530出油口(a)关闭,举升阀1530回油口(t1)打开,液压油经回油口(t1)流回液压油箱1415。
56.在整车控制中心170接收到第四指令中的举升信号时,双联泵1414从液压油箱1415吸油,后泵出油口给举升阀1530进油口(p)供油;气孔电磁阀1540保持4位和5位,给举升阀1530a1口供气,控制举升阀1530出油口(a)打开,举升阀1530回油口(t1)关闭,进行举升缸1520举升。当车辆的货箱举升至预设角度时,举升限位阀打开,断开举升阀1530a1口,举升缸1520保持举升状态。
57.在整车控制中心170接收到第四指令中的下降信号时,双联泵1414从液压油箱1415吸油,后泵出油口给举升阀1530进油口(p)供油;气孔电磁阀1540保持2位和3位,给举升阀1530b1口供气;举升阀1530出油口(a)打开,举升阀1530回油口(t1)打开,液压油经举升阀1530(a)回油口(t1)流回液压油箱1415。
58.所述整车电气子系统160,用于控制车辆内部的电气设备。
59.本实施例中,可选的,所述整车电气子系统160包括手动开关1610、单模继电器
1620、双模继电器1630和执行器1640;其中,所述手动开关1610与所述整车控制中心170电性连接,所述整车控制中心170、所述单模继电器1620、所述双模继电器1630与所述执行器1640电性连接。
60.本实施例中,电气设备可以是车辆内部的灯具。示例性的,手动开关1610接通地信号,并将该信号发送至整车控制中心170,整车控制中心170输出地信号至单模继电器1620,单模继电器1620线圈控制正端,与线圈控制负端的地信号形成回路,将负载端地信号接至双模继电器1630线圈负端,双模继电器1630吸合后,将负载端电源接至执行器1640供电,执行器1640进行工作。具体的,可以参见图1f示出的一种整车控制中心的架构示意图。
61.本实用新型实施例提供一种线控底盘运动控制系统,包括:环境感知子系统、线控驱动子系统、线控制动子系统、线控转向子系统、线控举升子系统、整车电气子系统和整车控制中心。采用上述技术手段能够实现提高车辆控制精度且易于产量化的目的。
62.实施例二
63.图2是本实用新型实施例二提供的一种线控底盘运动控制方法的流程示意图,该方法可以由线控底盘运动控制系统执行,所述线控底盘运动控制系统包括环境感知子系统、线控驱动子系统、线控制动子系统、线控转向子系统、线控举升子系统、整车电气子系统和整车控制中心。该装置可以采用软件和/或硬件的方式实现,并可集成于电子设备中,具体包括如下步骤:
64.s210、通过所述环境感知子系统构建环境地图,并发送环境信号至所述整车控制中心。
65.s220、通过所述线控驱动子系统根据第一指令自动驱动车辆行驶,其中,所述第一指令是由所述整车控制中心发送至所述线控驱动子系统的。
66.s230、通过所述线控制动子系统根据第二指令自动制动车辆,其中,所述第二指令是由所述整车控制中心发送至所述线控制动子系统的。
67.s240、通过所述线控转向子系统根据第三指令在自动驾驶状态下,对车辆进行转向,其中,所述第三指令是由所述整车控制中心发送至所述线控转向子系统的。
68.s250、通过所述线控举升子系统根据第四指令控制举升阀驱动举升缸,以使所述举升缸倾倒液压油箱内的液压油;其中,所述第四指令是由所述整车控制中心发送至所述线控举升子系统的。
69.s260、通过所述整车电气子系统控制车辆内部的电气设备。
70.可选的,所述通过所述线控制动子系统根据第二指令自动制动车辆,包括:
71.若通过所述环境感知子系统检测到周围环境中存在障碍物,则发送环境信号至所述整车控制中心;其中,所述环境信号中包括车辆减速指令;
72.通过所述整车控制中心接收所述车辆减速指令,并根据所述车辆减速指令发送第一指令至所述线控制动子系统;
73.通过所述线控制动子系统控制apu、单模阀、双模阀、abs阀和驻车阀工作,以对车辆进行减速和制动。
74.可选的,所述通过所述线控转向子系统根据第三指令在自动驾驶状态下,对车辆进行转向,包括:
75.通过所述环境感知子系统检测到周围环境中存在弯道时,则发送环境信号至所述
整车控制中心;其中,所述环境信号包括车辆转向指令;
76.通过所述整车控制中心接收所述车辆转向指令,并根据所述车辆转向指令发送所述第三指令至所述所述线控转向子系统;
77.通过所述线控转向子系统控制线控转向器,以使所述线控转向器控制转向器,控制车辆转向。
78.本实用新型实施例提供一种线控底盘运动控制方法,通过所述环境感知子系统构建环境地图,并发送环境信号至所述整车控制中心;通过所述线控驱动子系统根据第一指令自动驱动车辆行驶,其中,所述第一指令是由所述整车控制中心发送至所述线控驱动子系统的;通过所述线控制动子系统根据第二指令自动制动车辆,其中,所述第二指令是由所述整车控制中心发送至所述线控制动子系统的;通过所述线控转向子系统根据第三指令在自动驾驶状态下,对车辆进行转向,其中,所述第三指令是由所述整车控制中心发送至所述线控转向子系统的;通过所述线控举升子系统根据第四指令控制举升阀驱动举升缸,以使所述举升缸倾倒液压油箱内的液压油;其中,所述第四指令是由所述整车控制中心发送至所述线控举升子系统的;通过所述整车电气子系统控制车辆内部的电气设备。采用上述技术手段能够实现提高车辆控制精度且易于产量化的目的。
79.注意,上述仅为本实用新型的较佳实施例及所运用技术原理。本领域技术人员会理解,本实用新型不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1