一种自适应远光灯控制系统
1.本实用新型涉及汽车远光灯控制技术领域,具体涉及一种自适应远光灯控制系统。
背景技术:
2.随着汽车持有量的不断增加,人们对汽车安全的重视程度日益增强。车辆在夜间行驶中,驾驶人员对远光灯的操作不当是导致交通事故的原因之一。汽车远近灯光的切换,均是由驾驶者手动操作完成,灯光的合理切换很大程度上依赖于驾驶者的注意力和经验。因远光灯滥用导致的严重交通事故,往往是由于远光灯照射的对向车辆驾驶者或行人出现短暂性失明,看不清路面环境出现事故。
3.目前,关于远光灯控制技术发展状况,主要完成了对远光灯的亮、灭自动控制,或者是对传统前照车灯的远近光灯进行自动切换,但不能根据不同路况和周围环境实时情况调整led的相关控制策略,如对车辆前方的行人和车辆识别检测,并对行人和车辆所在位置的灯光进行控制。
技术实现要素:
4.为了解决现有技术车灯不能根据不同路况和周围环境实时情况调整led的相关控制策略的问题,本实用新型提供一种自适应远光灯控制系统,能够根据车辆驾驶环境的不同,做出相应的车灯控制决策,提升了汽车安全的主动性,结构组成简单、清晰。
5.本实用新型为解决其技术问题所采用的技术方案是:一种自适应远光灯控制系统,包括:
6.视觉传感器模块,用以获取周围环境图像数据信息,对图像数据信息进行处理后发送;
7.光敏检测模块,用以检测并发送周围环境光强度数据信息;
8.mcu控制模块,与视觉传感器模块、光敏检测模块连接,用以接收图像信息、光强度数据信息并做出判断及发送控制信号;
9.led控制模块,与mcu控制模块连接,用以接收mcu控制模块发送的控制信号,做出相应的亮、灭、亮度状态;
10.电源模块,分别与视觉传感器模块、光敏检测模块、mcu控制模块、led控制模块连接,用以向各模块供电。
11.进一步的,所述led控制模块包括与mcu控制模块连接的led控制器,以及与led控制器连接的led矩阵车灯。
12.进一步的,所述led矩阵车灯由多个分为上下两组依次对应排列的led灯组成,每一列的两个led灯作为一个灯光区域,各灯光区域独立控制。
13.进一步的,所述光敏检测模块包括相连接的光敏电阻和信号转换电路,其输出信号为模拟信号。
14.进一步的,所述视觉传感器模块采用k210芯片,mcu控制模块采用nxp s32k144芯片,k210芯片通过can总线向nxp s32k144芯片发送数据信息。
15.进一步的,所述led控制器采用ti tps92662-q1芯片。
16.有益效果:打破传统的远光灯控制,能够控制汽车前照灯的单个或多个led灯的亮灭和光强,根据车辆驾驶环境的不同,做出相应的控制决策;对车辆、行人的检测识别,做出不同的控制决策,实现对车灯自动控制,有效防止在夜间行车灯光给车辆驾驶者带来的眩目感,同时最大程度使用远光灯照明,提升了汽车安全的主动性,改善驾驶舒适性,该系统结构组成简单、清晰,便于实现。
附图说明
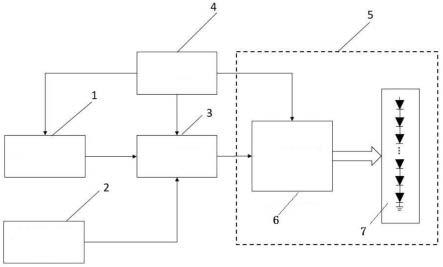
17.图1是本实用新型整体结构框图;
18.图2是本实用新型led矩阵车灯排列结构示意图;
19.图3是本实用新型光敏检测模块结构图;
20.图4是本实用新型mcu控制模块结构图;
21.图5是本实用新型视觉传感器模块结构图;
22.图6是本实用新型led控制器结构图;
23.图7是本实用新型实施例2系统流程图。
24.附图标记:1、视觉传感器模块,2、光敏检测模块,3、mcu控制模块,4、电源模块,5、led控制模块,6、led控制器,7、led矩阵车灯。
具体实施方式
25.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.在本实用新型的描述中,需要说明的是,术语“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或部件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于区分部件,而不能理解为指示或暗示相对重要性。
27.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
28.实施例1
29.一种自适应远光灯控制系统,包括:mcu控制模块3以及分别与其连接的视觉传感器模块1、光敏检测模块2、led控制模块5,上述各模块通过电源模块4进行供电。
30.视觉传感器模块1,采用k210芯片,用以获取周围环境图像数据信息,主要是对车辆前方车辆和行人的检测和识别,对图像数据信息进行处理,并通过can总线将处理过的数据信息发送给mcu控制模块3;
31.光敏检测模块2,如图3所示,包括相连接的光敏电阻和信号转换电路,用以实现对
车辆周围环境的光照强度检测,输出信号为模拟信号,将检测的数据信息发送到mcu控制模块3;mcu控制模块3对该数据信息进行分析,向led控制模块5发出控制信号;
32.mcu控制模块3,采用nxp s32k144芯片,用以接收视觉传感器模块1、光敏检测模块2发送的数据,对接收到的数据进步判断,做出控制决策,将控制信号发送给led控制模块5;通过can总线与车控制中心及其它控制单元连接,还使用uart搭配can两种通信方式与led控制模块5和视觉传感器模块1进行数据的发送和接收。
33.led控制模块5,包括与mcu控制模块3连接的led控制器6,以及与led控制器6连接的led矩阵车灯7;用以接收mcu控制模块3发送的控制信号,决策控制led矩阵车灯7的亮、灭以及亮度状态;
34.led控制器6采用ti tps92662-q1芯片;
35.led矩阵车灯7由多个分为上下两组依次对应排列的led灯组成,每一列的两个led灯作为一个灯光区域,各灯光区域独立控制;
36.电源模块4,分别与视觉传感器模块1、光敏检测模块2、mcu控制模块3、led控制模块5连接,用以向各模块供电。
37.本实施例中,所述led矩阵车灯7,左右两个车灯的led灯数量一致、左右对称,led灯的亮度以及灯光的亮灭,均是由led控制器6芯片产生脉冲宽度进行实时控制,每个led控制器6芯片可独立控制8个led灯,左右两个车灯led灯数量设置为32个,将其分为不同的灯光区域,独立控制各灯光区域的灯光亮度,灯光区域如下表所示,排列如图2所示。
38.led编号区域led区域l1,l2lq1r1,r2rq1l3,l4lq2r3,r4rq2l5,l6lq3r5,r6rq3l7,l8lq4r7,r8rq4l9,l10lq5r9,r10rq5l11,l12lq6r11,r12rq6l13,l14lq7r13,r14rq7l15,l16lq8r15,r16rq8
39.引脚连接:
40.1、k210芯片与mcu连接方式
41.k210芯片通过其集成的视觉传感器对周围环境信息进行采集,处理后的数据传送给nxp s32k144芯片。k210芯片的io6和io7两个引脚通过一个uart转can接口与nxp s32k144芯片的pta12和pta13连接,nxp s32k144芯片的这两个引脚为can1接口。
42.2、ti tps92662-q1芯片与mcu连接方式
43.ti tps92662-q1芯片的rx和tx两个引脚通过一个uart转can接口与nxp s32k144芯片的pte4和pte5连接,nxp s32k144芯片的这两个引脚为can0接口。
44.3、光敏检测模块2与mcu连接方式
45.光敏电阻的ad输出引脚连接nxp s32k144芯片的ptd16引脚,用mcu控制模块3内部模拟量处理芯片处理(12位)。
46.实施例2
47.一种自适应远光灯控制系统的控制流程:如图7所示,包括步骤:
48.s1:系统初始化:
49.分别对mcu控制模块3、视觉传感器模块1、led控制模块5、电源模块4和光敏检测模块2进行模块初始化设置,确保系统的安全性。
50.s2:开启自适应模式:
51.由驾驶者自主决定是否开启自适应模式,若驾驶者选择不开启,则为手动模式,如驾驶者选择开启,则为自适用模式。
52.手动模式:手动模式下与传统的汽车车灯操作方式一致,灯光的控制由驾驶者来完成;
53.自适应模式:自适用模式分为普通路段驾驶模式和高速路段驾驶模式两种情况:
54.高速路段驾驶模式:mcu控制模块3通过车辆上的gps模块,判断车辆是否处于高速路段,当驾驶车辆处于高速路段时,mcu控制模块3向led控制模块5发出高速模式控制信号;若车辆行驶不在高速路段,但实时检测速度大于90km/h时,车辆处于该状态下也定义为高速路段驾驶模式。
55.高速路段驾驶模式控制方法:mcu控制模块3向led控制模块5发送控制信号,led矩阵车灯7将会关闭lq1和rq8两个灯光区域的灯光,使照明视野更聚拢、更清晰,同时减少对两侧车道车辆的影响。
56.普通路段驾驶模式:自适应远光灯控制系统处于激活状态下,判断车辆的行驶速度,根据行驶速度控制灯光模式,若车速小于90km/h,则光敏检测模块2检测车辆驾驶环境的光照强度,检测周围车辆在驾驶环境照明不足且车速超过60km/h时,系统将自动打开远光灯。当系统检测到环境光照较强(超过7000lx)或车速小于40km/h时,将自动关闭远光灯。
57.当远光灯照射前方范围有车时,控制方法如下:
58.车辆识别:车辆在行驶的过程中,通过视觉传感器模块1采集前方环境信息进行处理,对前方目标进行识别分类。
59.车辆定位:视觉传感器模块1根据识别的数据信息,对前方车辆进行定位,从而获取前方车辆和驾驶车辆的相对位置信息。将处理好的信息发送给mcu控制模块3,让其做出控制决策,将相应位置的led灯亮度进行调节。
60.驾驶环境中出现行人时,控制方法如下
61.行人识别:车辆在行驶的过程中,通过视觉传感器模块1采集前方环境信息进行处理,对前方目标进行识别分类。
62.行人定位:视觉传感器模块1根据识别的数据信息,对前方行人进行定位,从而获取前方行人和驾驶车辆的相对位置信息。
63.将处理好的信息发送给mcu控制模块3,让其做出控制决策,将相应位置的led灯亮度进行调节,led控制模块5将控制行人对应灯光区域的led灯闪烁两次,间隔时间为1秒,用以提示行人,并调节行人对应灯光区域led灯的亮度。
64.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1