用于电动汽车充电的自行走电池车的制作方法
1.本实用新型涉及电动汽车充电领域,具体是一种用于电动汽车充电的自行走电池车。
背景技术:
2.电动汽车是一种利用电能为能量源,通过车载电源为电机供电驱动车轮行进的车辆。
3.传统的停车场受其空间限制,可能不能在每个车位安装充电桩以对电动车进行充电。因此需要额外的电池车,通过自动取枪机器人从电池车上取枪为电动汽车充电。充电枪的电缆长度较长,其下垂段可能接触地面造成磨损或影响电池车的行进,其下垂段过低还可能被自动取枪机器人的机械臂误钩造成损坏。
技术实现要素:
4.本实用新型的目的在于提供一种用于电动汽车充电的自行走电池车,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种用于电动汽车充电的自行走电池车,包括:agv动力底盘、主壳体、充电枪、存储电能以向充电枪供电的储能装置、电缆和用于使电缆在一定范围内运动的摆臂装置;
7.agv动力底盘设置于主壳体的底部;储能装置和摆臂装置安装至主壳体内;电缆连接充电枪和摆臂装置;摆臂装置包括:可转动地安装至主壳体的摆臂;主壳体形成有在摆臂运动时供电缆穿过的条状出口和用于不同角度放置充电枪的多个放置槽;多个放置槽环绕主壳体。
8.作为本实用新型进一步的方案:主壳体设有用于覆盖放置槽的多个盖门。
9.作为本实用新型进一步的方案:用于电动汽车充电的自行走电池车还包括若干个导向雷达。
10.作为本实用新型进一步的方案:两个导向雷达分别设置于主壳体的相对的两侧。
11.作为本实用新型进一步的方案:用于电动汽车充电的自行走电池车还包括:用于监测周围环境避免碰撞的多个监测摄像头;多个监测摄像头环绕主壳体。
12.作为本实用新型进一步的方案:用于电动汽车充电的自行走电池车还包括:用于投射光线指示行进方向的前进指示灯和后退指示灯;前进指示灯和后退指示灯安装至主壳体。
13.作为本实用新型进一步的方案:前进指示灯和后退指示灯为相同的指示灯;前进指示灯和后退指示灯分别安装至主壳体的前侧和后侧。
14.作为本实用新型进一步的方案:放置槽设置于主壳体的中部;条状出口设置于主壳体的顶端。
15.作为本实用新型进一步的方案:电缆可拆卸安装至摆臂的端部;主壳体的相对的
两侧均形成有条状出口。
16.作为本实用新型进一步的方案:摆臂装置还包括电机;电机驱动摆臂相对于主壳体在一定范围内摆动。
17.与现有技术相比,本实用新型的有益效果是:可以提升电缆的下垂段的高度,避免触地;降低被自动取枪机器人的机械臂误钩造成损坏的可能性。
18.设置不同角度的多个放置槽,方便不同方位或角度的自动取枪机器人从放置槽中取枪。
19.本实用新型的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
附图说明
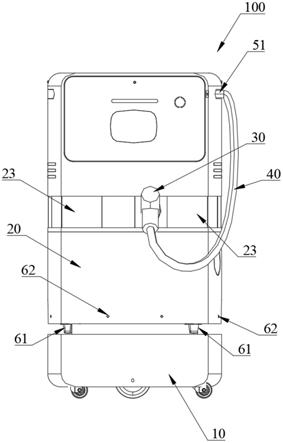
20.图1为本实用新型的用于电动汽车充电的自行走电池车的示意图;
21.图2为图1中用于电动汽车充电的自行走电池车的移除盖门后的立体图;
22.图3为图2中结构的另一视角的立体图。
23.附图标号清单:自行走电池车100,agv动力底盘10,主壳体20,条状出口21,放置槽22,盖门23,充电枪30,电缆40,摆臂51,导向雷达61,监测摄像头62,前进指示灯71,后退指示灯72。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.如图1至图3所示,本实用新型实施例中,一种用于电动汽车充电的自行走电池车100,包括:agv动力底盘10、主壳体20、充电枪30、存储电能以向充电枪30供电的储能装置、电缆40和用于使电缆40在一定范围内运动的摆臂装置。
26.充电枪30插装到电动汽车的充电口后,储能装置可以经电缆40和充电枪30向电动汽车充电。作为一种具体的实施方式,储能装置为电池。具体而言,储能装置可以采用锂电池。
27.agv动力底盘10设置于主壳体20的底部。agv动力底座10可以实现自动运动。具体而言,agv动力底座10包括两个动力轮和4个无动力轮。具体而言,两个动力轮设置于agv动力底座10的底部的中部。两个无动力轮设置于agv动力底座10的底部的前端。另外两个无动力轮设置于agv动力底座10的底部的后端。通过两个动力轮的转速的控制,实现前进后退以及转向。在两个动力轮差速时实现转向。两个动力轮同速时实现直线运动。动力轮正向转动时,agv动力底盘10前进;动力轮反向转动时,agv动力底盘10后退。
28.储能装置和摆臂装置安装至主壳体20内。电缆40连接充电枪30和摆臂装置。摆臂装置包括:可转动地安装至主壳体20的摆臂51。主壳体20形成有在摆臂51运动时供电缆40穿过的条状出口21。通过摆臂51的位于条状出口21的不同的位置,控制电缆40的前端的位置进而控制充电枪30的最大活动范围。在使用充电枪30时,通过摆臂51朝向充电枪30的方向摆动从而增加充电枪30的活动范围。在收纳充电枪30时,摆臂51远离充电枪30的存储位
置的方向摆动,从而提升电缆40的下垂段的高度。降低电缆40剐蹭异物的可能性。也避免了电缆40过低触碰底面磨损以及干扰自行走电池车100的其他设备的运行的可能性。
29.作为一种优选的实施方式,主壳体20还形成有用于不同角度放置充电枪30的多个放置槽22。多个放置槽22环绕主壳体20。设置不同角度的多个放置槽22,方便不同方位或角度的自动取枪机器人从放置槽22中取枪。
30.作为一种优选的实施方式,主壳体20设有用于覆盖放置槽22的多个盖门23。对于制定的取枪机器人,选定合适角度的放置槽22后,可以通过盖门23封闭未使用的放置槽22。盖门23设置为可拆卸门。可以从主机体20上分离。作为可选的实施方式,盖门还可以设置为不可分离的滑动门或转动门。
31.作为一种优选的实施方式,用于电动汽车充电的自行走电池车100还包括若干个导向雷达61。两个导向雷达61分别设置于主壳体20的相对的两侧。导向雷达61起主要导向作用。具体而言,主壳体20的截面大致呈矩形。两个导向雷达61设置于主壳体20的矩形的两边相交的对角位置。从而可以使两个导向雷达61具有较大的监测范围。
32.作为一种优选的实施方式,用于电动汽车充电的自行走电池车100还包括:用于监测周围环境避免碰撞的多个监测摄像头62。多个监测摄像头62环绕主壳体20。多个监测摄像头62起到辅助监测作用避免碰撞。通过图像算法判断是否前方具有障碍物,从而辅助控制agv动力底盘10进行规避运动。
33.作为一种优选的实施方式,用于电动汽车充电的自行走电池车100还包括:前进指示灯71和后退指示灯72。前进指示灯71和后退指示灯72用于投射光线指示行进方向。前进指示灯71和后退指示灯72安装至主壳体20。作为一个具体的实施方式,前进指示灯71和后退指示灯72为相同的指示灯。前进指示灯71和后退指示灯72分别安装至主壳体20的前侧和后侧。作为一种具体的实施方式,前进指示灯71和后退指示灯72可以透射出若干条弧形图案,从而指示运动的方向。例如后退指示灯72关闭,前进指示灯71亮起向前透射两条弧形图案,则表示用于电动汽车充电的自行走电池车100在向前运动。反之,当前进指示灯71关闭,后退指示灯72亮起向后透射两条弧形图案,则表示用于电动汽车充电的自行走电池车100在向后运动。透射光线还可以构成的图案还可以设置为箭头图案或文字等。
34.作为一种具体的实施方式,放置槽22设置于主壳体20的中部。条状出口21设置于主壳体20的顶端。提升电缆40的最底端的高度,有效降低电缆40的接触底面的可能。
35.作为一种具体的实施方式,电缆40可拆卸安装至摆臂51的端部。可以在摆臂51的内部设置导线与电缆40实现电连接。作为可以的实施方式,摆臂内可以不设置导线,通过电缆之间固定至摆臂的外部的方式,利用摆臂的运动调节电缆的位置。
36.作为一种优选的实施方式,摆臂装置设有电机。电机驱动摆臂51在一定范围内运动。作为一种具体的实施方式,可以通过电机驱动传动机构带动摆臂51运动。作为可选的实施方式,摆臂可以采用被动式的调节方式,实现位置的变化,通过自动取枪机器人牵引充电枪运动进而在长度不足时,通过电缆带动摆臂运动。可以设置复位弹簧恢复摆臂的初始位置。
37.主壳体20的相对的两侧均形成有条状出口21。可以设置出口盖门或出口塞。在使用一侧的条状出口21时,可以封闭另一侧的条状出口21。
38.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而
且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
39.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1