无人驾驶汽车的传感器安装架及集成传感装置的制作方法
1.本实用新型涉及无人驾驶技术领域,特别涉及一种无人驾驶汽车的传感器安装架。此外,本实用新型还涉及一种无人驾驶汽车的集成传感装置。
背景技术:
2.无人驾驶汽车是在一个未知的动态环境中运行的,因此,它需要事先构建出环境地图并在地图中进行自我定位;执行同步定位和映射过程(slam,即时定位和地图构建)的输入则需要传感器和ai(人工智能)系统的帮助。无人驾驶汽车上安装的多种传感器与人工智能系统连接,以使汽车可以感知周边环境的情况。选择多个传感器是为了权衡采样率、视场(fov)、精度、范围、成本和整个环境系统的复杂度。
3.在现有的设计中,通常的做法是采用不同类型的传感器搭载于无人驾驶汽车上,以满足无人驾驶的不同需求。
4.惯性导航装置作为高精度组合导航系统,是基于mems(mems, micro-electro-mechanical system,微机电系统)惯性导航技术、融合卫星导航、支持rtk(real-time kinematic,实时差分定位)和车辆信息(轮速、档位等) 的高性能组合导航定位系统,为整个无人驾驶系统提供了较为精准的定位信息。
5.除采用上述的惯性导航装置进行车辆的定位之外,无人驾驶汽车还需要实时检测周围的环境信息,通过感知周围环境的情况,以确保车辆的安全行驶。用于检测周边环境的传感器通常会使用较为成熟的高清摄像头和高精度激光雷达。
6.其中,高清摄像头通过收集反射到三维环境对象上的光来捕捉二维图像。图像质量通常取决于环境条件,即不同的天气条件,不同的光照环境,都会对图像质量产生不同的影响。计算机视觉和机器学习算法通常用于从捕获的图像或视频中提取有用的信息。通过在各个角度为车辆配备摄像头,可使车辆保持 360
°
的外部环境视野,并提供周围交通状况的更广阔画面。
7.激光雷达是使用发射器发射激光束,并通过接收器对遇障碍物后返回的激光束进行探测。激光雷达传感器通过发射脉冲激光,计算散射光从发射到遇障碍物返回的时间间隔(timeofflight,飞行时间),可对三维空间内的物体形状及距离进行有效感知,具有较长距离的感知作用。除能测量到道路上各种物体的距离之外,激光雷达还可以创建被探测物体的3d图像并绘制出周围环境的地图,是目前精度极高的传感器类型。
8.正是由于上述多种传感器均需要安装在无人驾驶汽车上,因此,如何搭载和布置各个传感器,是无人驾驶汽车研发中需要着重考虑的问题。目前,传感器的布置方案很多,大部分是采用分散布置的方式,在车辆不同位置以不同角度进行安装,虽然保证了环境感知的需求,但分布式的布置方案对于各传感器的线路布设、以及车辆整个系统的管理带来了诸多不便,也不利于车辆上各传感器的问题排查和日常维护。
技术实现要素:
9.有鉴于此,本实用新型旨在提出一种无人驾驶汽车的传感器安装架,以改善无人驾驶汽车上各类传感器的安装布置条件。
10.为达到上述目的,本实用新型的技术方案是这样实现的:
11.一种无人驾驶汽车的传感器安装架,所述传感器安装架包括框架,以及设于所述框架上的若干个支架;所述框架由多根型材搭接而成;所述支架位置可调地设于所述框架上;所述支架用于安装传感器。
12.进一步的,所述框架包括多根第一立梁,以及连接于相邻的两所述第一立梁顶部之间的横梁;所述支架包括第一支架;所述第一支架通过角码组件上下可调地连接于各所述第一立梁之间。
13.进一步的,所述第一立梁和所述横梁均为四根;四根所述第一立梁呈矩形排布;以及,四根所述横梁将各所述第一立梁的顶部依次相连。
14.进一步的,所述第一支架采用矩形板;所述矩形板的四个角部成型有安装部;所述安装部与位于对应位置的所述第一立梁上的所述角码组件相连。
15.进一步的,所述第一支架上设有多个用于安装所述传感器的安装位。
16.进一步的,所述框架还包括两根第二立梁;两所述第二立梁分设于相对设置的两根所述横梁上;所述支架还包括第二支架;所述第二支架设于两所述第二立梁的顶部。
17.进一步的,所述第二支架呈板状;且,所述第二支架上设有激光雷达安装位。
18.进一步的,所述第二支架上开设有固定孔和穿线孔;所述第二支架经穿设于所述固定孔中的紧固件安装于两所述第二立梁上;所述穿线孔用于穿设线路。
19.相对于现有技术,本实用新型具有以下优势:
20.本实用新型所述的无人驾驶汽车的传感器安装架,采用型材通过配套的角码组件等搭建出框架,并在框架上设置可以调整位置的支架,由支架来安装各类的传感器,不仅框架的形状和尺寸可以灵活调整,而且支架的数量及其位置也便于在框架上灵活设置,便于集中安装多种传感器,从而可改善无人驾驶汽车上各类传感器的安装布置条件。
21.同时,采用多根第一立梁和若干根横梁搭建框架,将第一支架通过型材配套的角码组件连接安装在各个第一立梁之间,便于通过调整角码组件的位置改变第一支架的高度,且可以为传感器提供一个便于安装的水平布置的平台。
22.此外,通过在横梁上设置第二立梁,在第二立梁的顶部设置第二支架,则通过调整第二立梁和横梁之间角码组件的连接部位,可方便地调整第二支架的高度。
23.本实用新型的另一个目的在于提出一种无人驾驶汽车的集成传感装置,包括多个传感器,各所述传感器安装在本实用新型所述的无人驾驶汽车的传感器安装架上。
24.进一步的,所述传感器包括惯性导航装置和多个摄像头;所述惯性导航装置设于所述支架的中部,各所述摄像头设于所述支架的边部。
25.相对于现有技术,本实用新型提出的集成传感装置具有以下优势:
26.本实用新型所述的无人驾驶汽车的集成传感装置,采用本实用新型提供的传感器安装架,可以将无人驾驶汽车所需的多种传感器集中安装在传感器安装架上,且便于调整各类传感器的高度位置,使各类传感器在无人驾驶汽车上的安装布置条件得以改善,便于各传感器的装配、问题排查和日常维护。
27.此外,在集成传感装置中设置惯性导航装置和多个摄像头,可实现对周边环境图像和视频信息的采集、以及对车辆的准确定位。
附图说明
28.构成本实用新型的一部分的附图,是用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明是用于解释本实用新型,其中涉及到的前后、上下等方位词语仅用于表示相对的位置关系,均不构成对本实用新型的不当限定。在附图中:
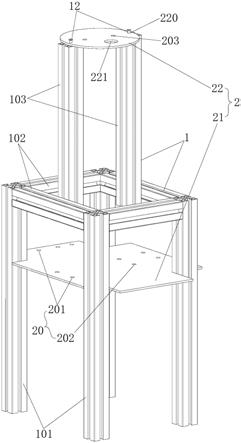
29.图1为本实用新型实施例一所述的无人驾驶汽车的传感器安装架的整体结构示意图;
30.图2为本实用新型实施例一所述的型材通过角码组件进行搭接的装配示意图;
31.图3为本实用新型实施例二所述的无人驾驶汽车的集成传感装置的整体结构示意图;
32.图4为本实用新型实施例二所述的集成传感装置于另一视角下的整体结构示意图;
33.附图标记说明:
34.1、框架;10、型材;11、角码组件;12、紧固件;100、角码固定槽;101、第一立梁;102、横梁;103、第二立梁;
35.2、支架;20、安装位;201、边部安装位;202、中部安装位;203、激光雷达安装位;21、第一支架;22、第二支架;220、固定孔;221、穿线孔;
36.3、激光雷达;30、线路;
37.4、惯性导航装置;
38.5、摄像头;51、高清长焦摄像头;52、高清广角摄像头。
具体实施方式
39.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
40.在本实用新型的描述中,需要说明的是,若出现“上”、“下”、“内”、“背”等指示方位或位置关系的术语,其为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;若出现“第一”、“第二”等术语,其也仅用于描述目的,而不能理解为指示或暗示相对重要性。
41.此外,在本实用新型的描述中,除非另有明确的限定,术语“安装”、“相连”、“连接”、“连接件”应做广义理解。例如,连接可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,亦或是两个元件内部的连通。对于本领域的普通技术人员而言,可以结合具体情况理解上述术语在本实用新型中的具体含义。
42.下面将参考附图并结合实施例来详细说明本实用新型。
43.实施例一
44.本实施例涉及一种无人驾驶汽车的传感器安装架,可改善无人驾驶汽车上各类传
感器的安装布置条件。
45.整体来说,该无人驾驶汽车的传感器安装架包括框架、以及设于框架上的若干个支架。其中,框架由多根型材搭接而成,支架则位置可调地设在框架上;支架用于安装传感器。
46.基于上述的设计思路,本实施例的无人驾驶汽车的传感器安装架的一种示例性结构如图1所示,其主要包括框架1和支架2两部分。
47.为了可以灵活调整和改变框架1的结构形状以及整体尺寸,结合图2所示,本实用新型的框架1采用型材10进行搭建,可通过配套的角码组件11将多根型材10连接为一体,形成不同大小和形状的框架结构,以将支架2安装在框架 1上的所需位置。
48.此间,型材10优选采用横截面呈方形的铝合金型材,在型材10的侧壁上开设有沿型材的长度方向布置的角码固定槽100,角码组件11中的螺栓头部可以滑动于角码固定槽100中,以灵活地调整角码组件11的位置,并通过螺栓和螺母将角码紧固在型材10上。同一个型材10分别和两根型材10连接,即可将两型材10拼接在一起。
49.借助角码组件11,也可将支架2安装在框架1中的型材10上;此时,角码组件11的一侧用于连接型材10,另一侧用于连接支架2,通过螺钉等紧固件 12和支架2上开设的安装孔,即可实现支架2和角码组件11的连接。这样的安装方式,便于通过调整角码组件11的位置以改变支架2在框架1中的位置。
50.在框架1的搭建中,可设置多根第一立梁101,以及用于将相邻的两个第一立梁101的顶部连接起来的横梁102,形成立式的框架。支架2可以是一个或多个,其中,支架2中的第一支架21通过角码组件11上下可调地连接在各第一立梁101之间。采用多根第一立梁101和若干根横梁102搭建框架1,将第一支架21通过型材10配套的角码组件11连接安装在各个第一立梁101之间,便于通过调整角码组件11的位置改变第一支架21的高度,且可以为传感器提供一个便于安装的水平布置的平台。
51.优选地,如图1所示,第一立梁101和横梁102均为四根,并且,四根第一立梁101呈矩形排布,四根横梁102将各个第一立梁101的顶部依次相连起来。四根第一立梁101的底部用于固定在无人驾驶汽车的车身上;例如,可固连于车辆的顶部。采用四根第一立梁101和四根横梁102搭建呈立方体状的框架1,形状结构规范,便于装配。
52.同时,框架1还包括两根第二立梁103。两跟第二立梁103分别通过角码组件11连接在相对设置的两根横梁102上;优选连接在横梁102的中部位置。而支架2配置两个,分别为第一支架21和第二支架22。第一支架21安装在各个第一立梁101之间,第二支架22则设在两个第二立梁103的顶部之间。在两相对侧的两根横梁102上分别设置一个第二立梁103,并在第二立梁103的顶部之间设置第二支架22,则通过调整第二立梁103和横梁102之间角码组件11 的连接部位,可方便地调整第二支架22的高度。
53.对于第一支架21和第二支架22的形状结构,可以是网状结构、由支撑杆搭建的支撑结构、或简单的平板状结构。优选地,本实施例的支架2均采用板状结构。
54.其中,第一支架21采用矩形板,并且在该矩形板的四个角部成型有安装部,由安装部与位于对应位置的第一立梁101上的角码组件11相连。该安装部可以是这样,首先在矩形板的四角切割出和第一立梁101的横截面形状一致的缺口,再在矩形板的缺口临近部位开设多个安装孔,由该安装孔作为安装部使用。借助螺栓副、螺钉等通过安装孔将第一支架21
紧固在角码组件11上。
55.采用矩形的板材作为第一支架21使用,便于加工配置,且适宜安装在四根呈矩形排布的第一立梁101之间;在矩形板的四个角部设置和角码组件11配合的安装部,以实现第一支架21在各第一立梁101上的安装。通过调整四个角码组件11的高度,可方便地调整第一支架21的上下位置。
56.基于第一支架21的形状特点,以及其基本为水平的布置姿态,可在第一支架21上设置多个用于安装传感器的安装位20。具体来说,安装位20包括位于第一支架21多个边上的边部安装位201,以及位于第一支架21中部的中部安装位202,在各个安装位20处可开设一些安装孔,用于安装的传感器。这样的设置,便于将不同种类的传感器分别安装在不同的安装位20,以适合各类传感器的不同检测需求。
57.第二支架22同样可采用板状;优选将第二支架22加工成圆形板,并在第二支架22上设有激光雷达安装位203,用于安装激光雷达。将第二支架22设置为板状,便于加工配置;在第二支架22上设置用于安装激光雷达的激光雷达安装位203,可使激光雷达位于整个框架1的顶部,适于激光雷达3的检测要求。
58.为了便于第二支架22的安装以及其上传感器的布置,在第二支架22上开设有固定孔220和穿线孔221;第二支架22通过穿设在固定孔220中的紧固件 12安装固定在两个第二立梁103的顶部;穿线孔221则用于穿设传感器的线路。其中,该处的紧固件12可以采用自攻螺钉,直接螺接到第二立梁103顶部中央的孔内。
59.本实施例所述的无人驾驶汽车的传感器安装架,采用型材10通过配套的角码组件11等搭建出框架1,并在框架1上设置可以调整位置的支架2,由支架2来安装各类的传感器,不仅框架的形状和尺寸可以灵活调整,而且支架2的数量及其位置也便于在框架1上灵活设置,便于集中安装多种传感器,从而可改善无人驾驶汽车上各类传感器的安装布置条件。
60.实施例二
61.本实施例涉及一种无人驾驶汽车的集成传感装置,该装置中设有多个传感器,并且,各传感器均安装在实施例一所提供的无人驾驶汽车的传感器安装架上。该集成传感装置的一种示例性结构如图3和图4所示。
62.采用本实用新型提供的传感器安装架,可以将无人驾驶汽车所需的多种传感器集中安装在传感器安装架上,且便于调整各类传感器的高度位置,使各类传感器在无人驾驶汽车上的安装布置条件得以改善,便于各传感器的装配、问题排查和日常维护。
63.对于集成传感装置中传感器的数量和种类,一种优选的配置方案为,在第二支架22的激光雷达安装位203上设置一台激光雷达3,在第一支架21的中部安装位202上安装一台惯性导航装置4。同时,结合实施例一中的图1所示,在第一支架21的三个边部上设置四个边部安装位201;其中,两个边部安装位 201间隔排布地设在位于集成传感装置前侧的第一支架21的同一个边部,另外两个边部安装位201分别设在位于集成传感装置左右两侧的第一支架21的两个边部上。
64.上述的四个边部安装位201用于分别安装四台摄像头5。其中,摄像头5 包括一台高清长焦摄像头51和三台高清广角摄像头52,高清长焦摄像头51安装在位于前侧的一个边部安装位201上,其它三个边部安装位201用来分别安装三台高清广角摄像头52。
65.在集成传感装置中设置惯性导航装置4和多个摄像头5,可实现对周边环境图像和
视频信息的采集、以及对车辆的准确定位;将惯性导航装置4设置在第一支架21的中部安装位202,将多个摄像头5安装在第一支架21的边部安装位201,不仅布置规范,且满足惯性导航装置4和摄像头5的检测要求,第一立梁101也不会影响摄像头5的视线。
66.通过上述的无人驾驶汽车的集成传感装置,可将其安装在车身上;例如,可通过将第一立梁101的底部固设在车顶上,使整个装置位于车辆顶部上方。此刻,惯性导航装置4被第一支架21刚性连接,避免了高精度组合惯导设备受车体震动而晃动的情况,有利于位置数据精度的保持。激光雷达3位于整个集成传感装置的顶部,可以不受阻挡地对周边环境进行检测。高清长焦摄像头51 和位于同一边部的一台高清广角摄像头52,它们的视角方向与车身前进的方向之间夹角为0
°
;位于左右两侧的两台高清广角摄像头52,其视角方向与车身前进方向之间的夹角分别为90
°
和-90
°
;如此一来,摄像头5可对车辆前方和两侧的情况进行全面的图像和视频信息采集。
67.而且,由于各类摄像头5在集成传感装置上实现了集中的配置,不仅布置安装条件更为便利,且对各类传感器的调整、检修和维护均更为方便。
68.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1