海空兼用飞行器的制作方法
1.本实用新型涉及多栖航行器技术领域,尤其涉及海空兼用飞行器。
背景技术:
2.海空两栖航行器是一种新型的跨介质运载平台,可同时进行空中、水面、水下探测等任务的高机动性运载平台,可以通过船载、岸基等形式进行布放与回收,能够进行远程遥控航行与自动航行。具备指定空域定位、定点航行、指定水域降落、自主水面航行、自主水下航行和飞行返航的功能,在海空立体观测、海洋环境调查、执行持久的情报收集和战场监视领域具备广泛的应用前景。
3.但是,现有的海空两栖航行器在金属水下探测时,航行器主体部分还是处于水面之上的,不仅无法对水下更深处进行探测,同时波动的水面很容易造成航行器进水,导致其无法正常工作,为此,提出海空兼用飞行器。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的海空兼用飞行器。
5.为了实现上述目的,本实用新型采用了如下技术方案:海空兼用飞行器,包括机身,所述机身的机头部分转动安装有螺旋桨,且机身机头部分的两侧均设有可自动充放气的气囊,所述机身的两侧均活动安装有角度可调节的机翼,所述机身上固定安装调节组件,所述调节组件能够带动两个机翼之间的夹角发生变化,所述机身的机尾部分固定安装有尾翼。
6.优选的,所述调节组件包括和机身固定连接在一起的矩形箱,所述矩形箱上开设有通过口,所述矩形箱内固定安装有矩形块,两个机翼相互靠近的一端贯穿通过口并和矩形块的两端转动连接在一起,所述矩形箱内滑动安装有移动块,所述移动块的两侧均铰接有铰接杆,两个铰接杆相互远离的一侧分别和两个机翼铰接在一起。
7.优选的,所述矩形块上转动安装有丝杆,所述丝杆贯穿矩形块,所述矩形箱的内固定安装有电机,所述电机的输出轴和丝杆固定连接在一起,所述丝杆贯穿移动块并和移动块螺纹连接在一起。
8.优选的,所述矩形箱远离机身的一侧内壁上固定安装有两个导轨,两个导轨上均滑动套设有滑块,两个滑块均和移动块固定连接在一起。
9.优选的,所述电机为防水电机,所述矩形箱远离机身的一侧内壁上开设有多个矩阵式分布的沥水孔。
10.优选的,所述机身和两个机翼的顶部均安装有太阳能电池板。
11.优选的,所述螺旋桨远离机身的一侧固定安装有破风圆锥头。
12.与现有技术相比,本实用新型的有益效果是:本实用新型同时兼备空中与水中两项工作机能,可先后对空中以及水中物体或生物进行寻找定位,并立刻潜入水中进行打捞
或是追踪观察,对于稀有海洋动物的检测与跟踪有很大帮助,同时可用于海上巡逻与搜救工作。
附图说明
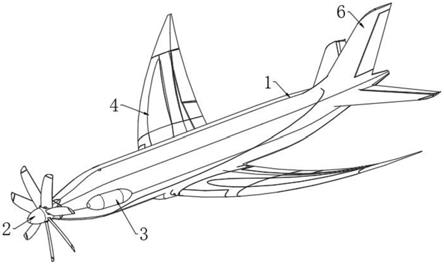
13.图1为本实用新型的整体结构示意图;
14.图2为本实用新型中调节组件和两个机翼展开状态下的结构示意图;
15.图3为本实用新型中调节组件和两个机翼的爆炸图;
16.图4为本实用新型中调节组件的侧剖图;
17.图5为本实用新型中调节组件和两个机翼折叠状态下的结构示意图。
18.图中:1、机身;2、螺旋桨;3、气囊;4、机翼;5、调节组件; 51、矩形箱;52、通过口;53、矩形块;54、移动块;55、铰接杆; 56、丝杆;57、电机;6、尾翼。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参照图1-5,本实用新型提供一种技术方案:海空兼用飞行器,包括机身1,机身1的机头部分转动安装有螺旋桨2,且机身1机头部分的两侧均设有可自动充放气的气囊3,机身1的两侧均活动安装有角度可调节的机翼4,机身1上固定安装调节组件5,调节组件5 能够带动两个机翼4之间的夹角发生变化,机身1的机尾部分固定安装有尾翼6。
21.具体的,尾翼6是能够左右摆动的,从而控制机身1的前进方向,机身1上还安装的超声波发生器,可有效趋避生物的靠近降低人类活动对生物的伤害,也可防止生物靠近人类活动区引起骚动。
22.调节组件5包括和机身1固定连接在一起的矩形箱51,矩形箱 51上开设有通过口52,矩形箱51内固定安装有矩形块53,两个机翼4相互靠近的一端贯穿通过口52并和矩形块53的两端转动连接在一起,矩形箱51内滑动安装有移动块54,移动块54的两侧均铰接有铰接杆55,两个铰接杆55相互远离的一侧分别和两个机翼 4铰接在一起。
23.矩形块53上转动安装有丝杆56,丝杆56贯穿矩形块53,矩形箱51的内固定安装有电机57,电机57的输出轴和丝杆56固定连接在一起,丝杆56贯穿移动块54并和移动块54螺纹连接在一起。
24.矩形箱51远离机身1的一侧内壁上固定安装有两个导轨,两个导轨上均滑动套设有滑块,两个滑块均和移动块54固定连接在一起。
25.电机57为防水电机,矩形箱51远离机身1的一侧内壁上开设有多个矩阵式分布的沥水孔。
26.具体的,防水电机能够在水中的时候也能够正常工作,而沥水孔能够在调节组件5从水中钻出的时候自动排干净矩形箱51内的水。
27.机身1和两个机翼4的顶部均安装有太阳能电池板。
28.具体的,机身1能够通过燃油以及电力进行供能,通过设置太阳能电池板能够在有
太阳的天气下自动对机身1进行充电,延长了机身 1的巡航里程。
29.螺旋桨2远离机身1的一侧固定安装有破风圆锥头。
30.具体的,破风圆锥头能够减小螺旋桨2受到的空气阻力以及水的阻力。
31.工作原理:在调节两个机翼4之间夹角的时候,可以通过电机 57带动丝杆56转动,随着丝杆56转动,移动块54和矩形块53之间的间距将发生变化,之后移动的移动块54能够通过两个铰接杆55 带动两个机翼4以矩形块53为圆心往相反的方向进行转动,当移动块54和矩形块53之间的间距处于最长的情况时,两个机翼4之间的夹角如图2所示,此时流经两个机翼4下方的气流能够对机身1提供上升力,当移动块54和矩形块53之间的间距处于端的情况时,两个机翼4之间的夹角如图5所示,此时流经两个机翼4下方的气流不对对机身1提供上升力;
32.当机身1在空中飞行时,两个机翼4之间的夹角展开至最大角度,在螺旋桨2旋转的过程中,气流流经两个机翼4时,将对两个机翼4 产生一个从下往上的推力,从而使得机身1能够在天空中飞行,使得安装在机身1上的监测机器对空中的生物进行追踪定位,需要机身1 钻进水中工作时,可以先通过调节组件5带动两个机翼4之间的夹角折叠至最小角度,此时两个机翼4对机身1的升力将减小,因而机身 1将不断下降,且由于机身1重心靠近机头的一侧,因而机身1的机头部分首先进入到水中,待到机身1完全没入水中时,转动的螺旋桨 2提供的动力将使得机身1在水中行进,使得安装在机身1上的监测机器能够对水中的生物进行追踪和定位,并且能够通过机身1对水中的悬浮物进行捕捞,而可以摆动的尾翼6能够控制机身1在水中的前进方向,需要使机身1从水中进入到空中时,先通过调节组件5控制两个机翼4之间的夹角展开至最大角度,从而加速机身1上浮的速度,之后再控制两个气囊3膨胀,使得机身1的接头部分以及螺旋桨2首先窜出水面,通过螺旋桨2提供的动力以及两个机翼4的上升力,使得机身1能够重新在空中飞行。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1