一种用于电驱动系统的扭矩控制方法及扭矩控制系统与流程
1.本发明涉及电驱动系统控制领域,特别是涉及一种用于电驱动系统的扭矩控制方法及扭矩控制系统。
背景技术:
2.当前纯电动汽车或(插电)混合动力汽车等新能源汽车的高压电池基本采用的都是可二次充电的锂电池。电压是锂离子电池的重要参数,其中截止电压是指电池放电时允许的最低电压和电池充电时允许的最高电压。如果电压低于放电截止电压后继续放电,电池正极的电势持续降低,而负极电势会迅速上升,形成过度放电。过度放电可能造成电极活性物质损伤,失去反应能力,使电池寿命缩短;还会导致负极铜箔分解并在正极析出,存在短路风险。如果充电电压高于充电截止电压,电池正极的电势持续升高,造成正极材料过过度脱锂,晶体结构破坏失效,电解液分解损耗锂离子;而负极电势会持续下降,过度嵌锂,石墨层状瓦解,极片表面析锂等问题。
3.为了避免纯电动汽车或(插电)混合动力汽车等电动车辆在运行过程中,因电驱动系统在电动模式下从高压电池中取电,导致电池电压跌落,低于其最低截止工作电压,和能量回收模式下对电池充电,导致电池电压被抬升,高于其截止最高工作电压的情况,需要根据实际电压与其截止工作电压,对电驱动系统的可用扭矩进行合理的限制,并保证电驱动系统扭矩输出的平顺。
4.针对纯电动汽车或(插电)混合动力汽车高压电池的电压应保证在其截止电压范围内的问题,当前行业内主要的关注点在于对车辆进行充电时的控制,例如由快充设备(直流充电桩)或慢充设备(车载充电机)充电的过程,而对车辆运行过程中,低soc(荷电状态)时驱动或混合动力车辆启动发动机时造成的电压跌落,以及高soc时车辆进行能量回收造成电压抬升等工况下电池电压超出其截止工作电压(在电池老化后,情况更加恶劣),对高压电池的损害是被忽视的。上述工况存在对电池的滥用的情况,因此缩短了高压电池的使用寿命。
5.虽然有一些车企/或供应商关注到了这个问题,但在控制系统设计上,其控制方法还相对的简单,即在实际电压跌落到截止最低工作电压,切断电驱动系统的电动输出,在实际电压高于截止最高工作电压,切断电驱动系统的发电输出。由于控制上的滞后、以及测量的实际电池电压误差、估计的截止电压存在误差,在此类控制方法中过充电和过放电现象还是存在的,且容易引起驾驶性问题。
技术实现要素:
6.鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的扭矩控制方法及扭矩控制系统。
7.本发明第一方面的一个目的是提供一种扭矩控制方法,能够有效保护车辆的高压电池。
8.本发明的另一个目的是要保证车辆的驾驶平顺性。
9.本发明第二方面的一个目的是要提供一种扭矩控制系统,能够有效保护车辆的高压电池。
10.特别地,根据本发明实施例的一方面,提供了一种用于电驱动系统的扭矩控制方法,所述电驱动系统包括高压电池和电机,所述扭矩控制方法包括:
11.获取所述高压电池的充电截止电压和放电截止电压;
12.设置允许充电下限值和允许放电上限值,所述允许充电下限值小于所述充电截止电压,所述允许放电上限值大于所述放电截止电压;
13.将所述高压电池的实际电压与所述允许充电下限值和所述允许放电上限值进行比较;
14.在所述高压电池的实际电压大于或等于所述允许充电下限值或者小于或等于所述允许放电上限值时,设置动态目标电压值,所述动态目标电压值配置为使所述高压电池的电压不超出所述充电截止电压和所述放电截止电压;
15.根据所述高压电池的实际电压和所述动态目标电压值计算目标扭矩值;
16.根据所述高压电池的实际电压与所述允许充电下限值和所述允许放电上限值的比较结果和所述目标扭矩值设置所述电驱动系统的可用扭矩限值,并根据所述可用扭矩限值控制所述电机的扭矩输出。
17.可选地,在所述高压电池的实际电压大于或等于所述允许充电下限值,或所述高压电池的实际电压小于或等于所述允许放电上限值时,设置动态目标电压值的步骤包括:
18.在所述高压电池的实际电压大于或等于所述允许充电下限值,将所述动态目标电压值设置为以所述允许充电下限值为起点按照第一预设斜率递增至所述充电截止电压;
19.在所述高压电池的实际电压小于或等于所述允许放电上限值时,将所述动态目标电压值设置为以所述允许放电上限值为起点按照第二预设斜率递减至所述放电截止电压。
20.可选地,所述根据所述高压电池的实际电压和所述动态目标电压值计算目标扭矩值的步骤包括:
21.计算所述实际电压和所述动态目标电压值的差值;
22.根据所述差值和pid控制算法计算扭矩限制值;
23.计算所述电机的实际输出扭矩和所述扭矩限制值的差值作为所述目标扭矩值。
24.可选地,所述设置允许充电下限值和允许放电上限值的步骤包括:
25.将所述充电截止电压与第一设定值的差设置为所述允许充电下限值,所述第一设定值为标定的正数;
26.将所述放电截止电压与第二设定值的和设置为所述允许放电上限值,所述第二设定值为标定的正数。
27.可选地,所述可用扭矩限值包括可用电动扭矩限值和可用发电扭矩限值。
28.可选地,所述根据所述高压电池的实际电压与所述允许充电下限值和所述允许放电上限值的比较结果和所述目标扭矩值设置所述电驱动系统的可用扭矩限值的步骤包括:
29.在所述高压电池的实际电压大于或等于所述允许充电下限值时,将所述电驱动系统的可用发电扭矩限值设置为所述目标扭矩值,并将所述电驱动系统的可用电动扭矩限值设置为所述电驱动系统的最大电动扭矩输出能力。
30.可选地,所述根据所述高压电池的实际电压与所述允许充电下限值和所述允许放电上限值的比较结果和所述目标扭矩值设置所述电驱动系统的可用扭矩限值的步骤包括:
31.在所述高压电池的实际电压小于或等于所述允许放电上限值时,将所述电驱动系统的可用电动扭矩限值设置为所述目标扭矩值,并将所述电驱动系统的可用发电扭矩限值设置为所述电驱动系统的最大发电扭矩输出能力。
32.可选地,所述根据所述高压电池的实际电压与所述允许充电下限值和所述允许放电上限值的比较结果和所述目标扭矩值设置所述电驱动系统的可用扭矩限值的步骤包括:
33.在所述高压电池的实际电压小于所述允许充电下限值且大于所述允许放电上限值时,将所述电驱动系统的可用电动扭矩限值设置为所述电驱动系统的最大电动扭矩输出能力,并将所述电驱动系统的可用发电扭矩限值设置为所述电驱动系统的最大发电扭矩输出能力。
34.可选地,所述获取所述高压电池的充电截止电压和放电截止电压的步骤包括:
35.获取所述高压电池的状态参数,所述状态参数包括电池荷电状态和/或电池温度;
36.根据所述状态参数确定所述高压电池的充电截止电压和放电截止电压。
37.特别地,根据本发明实施例的另一方面,还提供了一种用于电驱动系统的扭矩控制系统,包括存储器和处理器,所述存储器内存储有控制程序,所述控制程序被所述处理器执行时用于实现上述任一项所述的扭矩控制方法。
38.本发明在实际电压越过允许充电下限值接近充电截止电压,或越过允许放电上限值接近放电截止电压时,就通过设置动态目标电压值的方式控制高压电池的实际电压。也就是,在放电截止电压和充电截止电压的限制基础上对高压电池允许的充电能力或放电能力建立了合理的缓冲空间,即约束此时电驱动系统在发电状态或电动状态下的可用扭矩,避免出现高压电池的电压被抬高到高于允许的最高工作电压或被拉低到低于允许的最低工作电压,而对其电动扭矩不作限制的情况,在高压电池的实际电压接近其充电截止电压或放电截止电压时尽可能的稳住电压,防止电压进一步抬升至超出其充电截止电压或进一步跌落至低于其放电截止电压,避免了过充或过载对高压电池造成伤害,保证了电池的使用寿命。
39.进一步地,本发明通过合理地设置第一预设斜率和第二预设斜率可以实现高压电池的实际电压平滑过渡,进而实现电驱动系统的可用发电扭矩限值的平滑过渡或电驱动系统的可用电动扭矩限值的平滑过渡,从而避免电驱动系统扭矩输出的突变,引起整车冲击等驾驶性问题,即保证了整车驱动扭矩的平滑过渡。
40.进一步地,本实施例中在高压电池的电压大于或等于允许充电下限值就将动态目标电压值设置为以允许充电下限值为起点按照第一预设斜率递增至充电截止电压,在高压电池的电压小于或等于允许放电上限值就将动态目标电压值设置为以允许放电上限值为起点按照第二预设斜率递减至放电截止电压,即对充电截止电压和放电截止电压增加了一个滞回,避免因高压电池的电压在充电截止电压或放电截止电压附近波动致使电驱动系统的扭矩输出在有和无状态频繁切换而引起冲击,从而保证扭矩输出的平顺性。
41.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
42.根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述以及其他目的、优点和特征。
附图说明
43.后文将参照附图以示例性而非限制性的方式详细描述本发明的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:
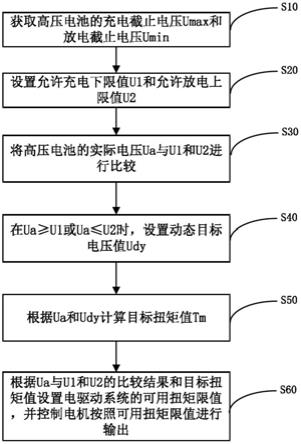
44.图1是根据本发明一个实施例的用于电驱动系统的扭矩控制方法的流程图;
45.图2是根据本发明另一个实施例的用于电驱动系统的扭矩控制方法的流程图;
46.图3是根据本发明一个实施例的用于电驱动系统的扭矩控制方法中各个电压参数的对应关系图;
47.图4是根据本发明另一个实施例的用于电驱动系统的扭矩控制方法中计算扭矩限制值的控制原理图。
具体实施方式
48.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
49.本发明的扭矩控制方法用于电驱动系统,即包括了高压电池和电机的车辆驱动系统。图1是根据本发明一个实施例的用于电驱动系统的扭矩控制方法的流程图。如图1所示,本实施例中,该扭矩控制方法包括:
50.步骤s10:获取高压电池的充电截止电压umax和放电截止电压umin。可选地,步骤s10包括:获取高压电池的状态参数,状态参数包括电池荷电状态和/或电池温度等;根据状态参数确定高压电池的充电截止电压umax和放电截止电压umin。充电截止电压umax也称为充电终止电压,是指在规定的恒流充电期间,电池达到完全充电状态时的电压。到达终止电压后若仍继续充电,即为过充电,一般对电池性能和寿命有损害。一般地,高压电池的生产厂商会对电池做大量的试验来确定高压电池满足安全寿命的要求范围的充电截止电压umax。
51.步骤s20:设置允许充电下限值u1和允许放电上限值u2,允许充电下限值u1小于充电截止电压umax,允许放电上限值u2大于放电截止电压umin。例如将充电截止电压umax与第一设定值的差设置为允许充电下限值u1,第一设定值为标定的正数,例如为8-15之间的数值,可以是8、10或15等。例如将放电截止电压umin与第二设定值的和设置为允许放电上限值u2,第二设定值为标定的正数,第二设定值可以是与第一设定值相同的数值,例如为8-15之间的数值,可以是8、10或15等。
52.步骤s30:将高压电池的实际电压ua与允许充电下限值u1和允许放电上限值u2进行比较。
53.步骤s40:在高压电池的实际电压ua大于或等于允许充电下限值u1或者小于或等于允许放电上限值u2时,设置动态目标电压值。动态目标电压值配置为使高压电池的电压
不超出充电截止电压umax和放电截止电压umin。
54.步骤s50:根据高压电池的实际电压ua和动态目标电压值udy计算目标扭矩值tm。
55.步骤s60:根据高压电池的实际电压ua与允许充电下限值u1和允许放电上限值u2的比较结果和目标扭矩值tm设置电驱动系统的可用扭矩限值,并根据可用扭矩限值控制电机的扭矩输出,也就是约束电机的输出扭矩不超过该可用扭矩限值。
56.本实施例中,在实际电压ua越过允许充电下限值u1接近充电截止电压umax,或越过允许放电上限值u2接近放电截止电压umin时,就通过设置动态目标电压值的方式控制高压电池的实际电压ua。也就是,在放电截止电压umin和充电截止电压umax的限制基础上对高压电池允许的充电能力或放电能力建立了合理的缓冲空间,即约束此时电驱动系统在发电状态或电动状态下的可用扭矩,避免出现高压电池的电压被抬高到高于允许的最高工作电压或被拉低到低于允许的最低工作电压,而对其电动扭矩不作限制的情况,在高压电池的实际电压ua接近其充电截止电压umax或放电截止电压umin时尽可能的稳住电压,防止电压进一步抬升至超出其充电截止电压umax或进一步跌落至低于其放电截止电压umin,避免了过充或过载对高压电池造成伤害,保证了电池的使用寿命。
57.图2是根据本发明另一个实施例的用于电驱动系统的扭矩控制方法的流程图。图3是根据本发明一个实施例的用于电驱动系统的扭矩控制方法中各个电压参数的对应关系图。图3中的横坐标为时间,纵坐标为电压值。如图2所示,本实施例中,步骤s30包括步骤s302和步骤s304,步骤s40包括步骤s402和步骤s404。
58.步骤s302:判断高压电池的实际电压ua是否大于或等于允许充电下限值u1,若是进入步骤s402,否则进入步骤s304。
59.步骤s304:判断高压电池的实际电压ua是否小于或等于允许放电上限值u2,若是进入步骤s404。
60.步骤s402:将动态目标电压值udy设置为以允许充电下限值u1为起点按照第一预设斜率递增至充电截止电压umax。
61.步骤s404:将动态目标电压值udy设置为以允许放电上限值u2为起点按照第二预设斜率递减至放电截止电压umin。
62.本实施例通过合理地设置第一预设斜率和第二预设斜率可以实现高压电池的实际电压ua平滑过渡,进而实现电驱动系统的可用发电扭矩限值tqavl_gen的平滑过渡或电驱动系统的可用电动扭矩tqavl_mot的平滑过渡,从而避免电驱动系统扭矩输出的突变,引起整车冲击等驾驶性问题,即保证了整车驱动扭矩的平滑过渡。
63.进一步地,本实施例中在高压电池的电压大于或等于允许充电下限值u1就将动态目标电压值udy设置为以允许充电下限值u1为起点按照第一预设斜率递增至充电截止电压umax,在高压电池的电压小于或等于允许放电上限值u2就将动态目标电压值udy设置为以允许放电上限值u2为起点按照第二预设斜率递减至放电截止电压umin,即对充电截止电压umax和放电截止电压umin增加了一个滞回,避免因高压电池的电压在充电截止电压umax或放电截止电压umin附近波动致使电驱动系统的扭矩输出在有和无状态频繁切换而引起冲击,从而保证扭矩输出的平顺性。
64.一个实施例中,步骤s50包括以下步骤:计算实际电压ua和动态目标电压值udy的差值;根据差值和pid控制算法计算扭矩限制值tq_error;计算电机的实际输出扭矩tq_act
和扭矩限制值tq_error的差值作为目标扭矩值tm。
65.图4是根据本发明另一个实施例的用于电驱动系统的扭矩控制方法中计算扭矩限制值tq_error的控制原理图。如图4所示,通过将实际电压ua和动态目标电压值udy的差值输入到pid控制器,pid控制器执行对应的pid算法计算出扭矩限制值tq_error。当然在其他实施例中还可以采用其他算法根据实际电压ua和动态目标电压值udy的差值计算扭矩限制值tq_error,只要能使得计算出的扭矩限制值tq_error能够反应实际电压ua和目标电压值udy的差值的对应关系即可。
66.一个实施例中,可用扭矩限值包括可用电动扭矩限值tqavl_mot和可用发电扭矩限值tqavl_gen。
67.如图2所示,一个实施例中,步骤s402和步骤s50之后的步骤s60包括步骤s602,步骤s404和步骤s50之后的步骤s60包括步骤s604。
68.步骤s602:将电驱动系统的可用发电扭矩限值tqavl_gen(即可用发电扭矩的最大值)设置为目标扭矩值tm,并将电驱动系统的可用电动扭矩限值tqavl_mot设置为电驱动系统的最大电动扭矩输出能力。
69.由于此时电驱动系统处于电压抬升的状态(例如能量回收模式下对电池充电),因此其电动扭矩的输出能力是足够的,因此可以将电驱动系统的可用电动扭矩限值tqavl_mot设置为其最大电动扭矩输出能力,可以最大限度地输出电动扭矩。
70.步骤s604:将电驱动系统的可用电动扭矩限值tqavl_mot设置为目标扭矩值tm,并将电驱动系统的可用发电扭矩限值tqavl_gen设置为电驱动系统的最大发电扭矩输出能力。
71.由于此时电驱动系统处于电压跌落的状态(例如电驱动系统在电动模式下从高压电池中取电),因此其发电扭矩的输出能力是足够的,因此可以将电驱动系统的可用发电扭矩限值tqavl_gen设置为其最大发电扭矩输出能力,电驱动系统具有最大限度地输出发电扭矩的能力。
72.当然,在一些实施例中,若步骤s304中判断出高压电池的实际电压ua大于允许放电上限值u2,则进入步骤s406:将电驱动系统的可用发电扭矩限值tqavl_gen设置为电驱动系统的最大发电扭矩输出能力、可用电动扭矩限值tqavl_mot设置为电驱动系统的最大电动扭矩输出能力。此时,高压电池的电压处于允许放电上限值u2和允许充电下限值u1之间,处于正常的工作状态,不需要进行特殊设置。
73.在步骤s602、步骤s604或步骤s406中,由于电驱动系统中的电机及其控制器通常都具备四象限运行功能,即正转电动、反转电动、正转发电和反转发电,对应的输出的电动扭矩和发电扭矩也有正反之分,相应地最大发电扭矩输出能力也包括了正转发电扭矩输出能力和反转发电扭矩输出能力,最大电动扭矩输出能力也包括了正转电动扭矩输出能力和反转电动扭矩输出能力。因此需要先判断电机处于何种运行状态,再根据运行状态确定具体的最大发电扭矩输出能力和最大电动扭矩输出能力。具体地可以根据电机实际扭矩和电机实际转速,或根据整车对电驱动系统的请求扭矩和电机实际转速来确定电机的运行状态。例如,在根据电机实际扭矩和电机实际转速来确定电机的运行状态的过程按照如下方式进行判断:(1)在电机实际扭矩大于或等于零,并且电机实际转速大于或等于零时,判定电机处于正转电动状态;(2)在电机实际扭矩小于零,并且电机实际转速大于或等于零时,
判定电机处于正转发电状态;(3)在电机实际扭矩小于零,并且电机实际转速小于零时,判定电机处于电动反转状态;(4)在电机实际扭矩大于或等于零,并且电机实际转速小于零时,判定电机处于反转发电状态。当确定电机处于何种运行状态后就可以确定对应的最大发电扭矩输出能力和最大电动扭矩输出能力,例如当判定电机处于正转电动状态时,最大电动扭矩输出能力即为正转电动扭矩输出能力。
74.本发明还提供了一种用于电驱动系统的扭矩控制系统,包括存储器和处理器,存储器内存储有控制程序,控制程序被处理器执行时用于实现根据上述任一项的扭矩控制方法。处理器可以是一个中央处理单元(central processing unit,简称cpu),或者为数字处理单元等等。处理器通过通信接口收发数据。存储器用于存储处理器执行的程序。存储器是能够用于携带或存储具有指令或数据结构形式的期望的程序代码并能够由计算机存取的任何介质,也可以是多个存储器的组合。上述计算程序可以从计算机可读存储介质下载到相应计算/处理设备或者经由网络(例如因特网、局域网、广域网和/或无线网络)下载到计算机或外部存储设备。
75.至此,本领域技术人员应认识到,虽然本文已详尽示出和描述了本发明的示例性实施例,但是,在不脱离本发明精神和范围的情况下,仍可根据本发明公开的内容直接确定或推导出符合本发明原理的许多其他变型或修改。因此,本发明的范围应被理解和认定为覆盖了所有这些其他变型或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1