用于车辆的访问设备的制作方法
用于车辆的访问设备
1.本发明涉及一种用于车辆、尤其是用于机动车辆的访问设备。本发明还涉及一种具有这种访问设备的车辆。最后,本发明涉及一种用于操作车辆的访问设备的方法。
2.在当今的现代车辆、尤其是机动车辆中,所谓的被动式访问设备被用于访问控制,其中,车辆与驾驶员的相关联移动识别发射器进行问答对话,以验证驾驶员的身份。代码从识别发射器自动发射到车辆,而无需驾驶员操作识别发射器的操作元件。如果发射到车辆的代码与预定代码匹配,则车辆的特定车门或所有车门被解锁或打开。
3.这种访问设备的缺点是,问答对话可能会被作为所谓的中间人攻击(“中继攻击”)的一部分的无线电链路扩展所欺骗,因此车辆可能会被窃贼偷走。
4.因此,本发明的目的是提供一种改进的被动式车辆访问选项,该选项在不损失驾驶员舒适度的情况下提供更大的安全性。
5.此目的通过独立权利要求的主题来实现。从属权利要求涵盖了有利配置。
6.根据本发明的第一方面,提供了一种用于车辆、尤其是机动车辆的访问设备,该访问设备具有以下特征。
7.该访问设备具有车辆发射/接收装置,该车辆发射/接收装置被配置为向移动识别发射器发射多个询问信号。在这种情况下,这些询问信号尤其是一个接一个地发射的。此外,车辆发射/接收装置被配置为从移动识别发射器接收对应的响应信号以响应所发射的询问信号,以便确定询问信号的发射与对应的响应信号的接收之间所经过的相应时间间隔。该访问设备还包括车辆控制装置,该车辆控制装置用于基于两个所发射的询问信号各自的特定时间间隔的变化来输出不同的控制命令。通过对来自车辆的相应询问信号和来自识别发射器的对应的响应信号使用飞行时间测量,可以有效地防止中间人攻击。此外,通过监测两个所发射的询问信号的特定时间间隔的变化,车辆控制装置能够用适当的控制命令对携带移动识别发射器的驾驶员的不同情况和应用作出反应。
8.可以设想,车辆控制装置对直接一个接一个地发射的两个询问信号各自的特定时间间隔的变化执行检查。然而,车辆控制装置也可以对不是直接一个接一个地发射的两个所发射的询问信号各自的特定时间间隔的变化执行检查。这意味着车辆控制装置首先确定第一询问信号的发射与对应的响应信号的接收之间的第一时间间隔,然后发射特定数量的一个或多个另外的询问信号。车辆控制装置然后发射第二询问信号并使用它来确定第二询问信号的发射与对应的响应信号的接收之间的第二时间间隔,以便最终确定第一时间间隔和第二时间间隔的变化。这种对彼此间隔开特定数量的另外的询问信号或预定时间段的两个所发射的询问信号各自的特定时间间隔的变化的确定是有利的,特别是在询问信号在相对较短的时间内连续发射和/或预计移动识别发射器只有非常缓慢的移动的情况下。
9.根据该访问设备的一种配置,询问信号和响应信号是符合uwb(超宽带)标准的信号。就此而言,相应地可以设想,车辆发射/接收装置作为uwb发射器向移动识别发射器发送uwb信号、尤其是加密的uwb信号。然后,移动识别发射器可以对信号进行签名,并将其以修改后的形式返回给车辆发射/接收装置(现在作为uwb接收器)。车辆发射/接收装置现在知道在信号的发送与接收之间已经经过了多少时间,并且因此可以确定在询问信号的发射与
对应的响应信号的接收之间所经过的相应时间间隔。此外还可以设想,还减去移动识别发射器计算签名所需的设想时间,以便由此确定询问信号和响应信号的实际飞行时间。
10.使用特定时间间隔、或者询问信号和响应信号的实际飞行时间,车辆发射/接收装置或相关联的车辆控制装置还可以计算移动识别发射器所在的距离或半径。如果在车辆的不同位置提供多个uwb发射器和接收器(它们与移动识别发射器交换uwb信号),则还可以计算移动识别发射器相对于车辆的确切位置。
11.根据该访问设备的一种配置,车辆控制装置被配置为识别特定的应用并输出适用的控制命令。就此而言,该车辆控制装置能够在两个所发射的询问信号的特定时间间隔的变化小于或等于预定阈值的情况下输出至少一个第一控制命令。这意味着在这种情况下,车辆控制装置识别出移动识别发射器不移动或几乎不移动的差不多“静态”情况,比如在起动发动机的验证过程期间或者移动识别发射器意外留在车辆内或车辆附近的情况。此外或作为这种情况的替代方案,车辆控制装置能够在两个所发射的询问信号的特定时间间隔的变化大于预定阈值的情况下输出至少一个第二控制命令。这意味着在这种情况下,车辆控制装置识别出移动识别发射器明显移动的差不多“动态”情况,比如朝向或远离车辆移动的情况。
12.特别地,当识别出“动态”情况时,即当检测到两个所发射的询问信号的特定时间间隔的变化大于预定阈值时,这表明朝向或远离车辆的移动,车辆控制装置可以输出解锁命令或锁定命令。为了明确定义要输出这两个控制命令中的哪一个,可以指定当检测到变化大于预定阈值时,只输出这些控制命令中的特定控制命令(比如锁定命令)。
13.当识别出动态情况时,还可以设想包括另外的参数,以便有针对性地输出合适的控制命令。因此可以设想,使用来自用于感测车辆的至少一个车门的解锁状态或锁定状态的锁定传感器和/或来自用于感测车辆的至少一个车门的打开状态或关闭状态的车门传感器的信号作为另外的参数。还可以设想,使用在询问信号的发射与对应的响应信号的接收之间所经过的相应时间间隔作为另外的参数。就此而言,可以考虑时间间隔的持续时间,它是询问信号和对应的响应信号所行进距离的量度。因此,特定时间间隔可以表示车辆发射/接收装置与移动识别发射器之间的距离。此外,对时间间隔变化的确切考虑可以用作另外的参数,即第二特定时间间隔是大于还是小于两个所发射的询问信号中的第一个。
14.为了确切地指定车辆控制装置输出哪个控制命令,所述装置可以使用所提到的另外的参数之一、或者这些参数的特定组合。
15.例如,输出锁定命令的标准可以如下。第一个标准是检测到两个所发射的询问信号的特定时间间隔的变化大于预定阈值。另一个标准可以是来自锁定传感器的、表示车辆的至少一个车门的解锁状态的信号的存在,和/或如果两个所发射的询问信号中的第二个的特定时间间隔长于两个所发射的询问信号中的第一个的特定时间间隔,和/或如果两个所发射的询问信号的特定时间间隔中的至少一个超过第二预定阈值(以及因此超过车辆与移动识别发射器之间的距离),和/或如果车门传感器在两个所发射的询问信号中的第一个和第二个的发射之前的预定时间段内检测到车辆的至少一个车门的打开、或者打开和关闭。
16.此外,例如,输出解锁命令的标准可以如下。第一个标准是检测到两个所发射的询问信号的特定时间间隔的变化大于预定阈值。另一个标准可以是来自锁定传感器的、表示
车辆的至少一个车门的锁定状态的信号的存在,和/或如果两个所发射的询问信号中的第二个的特定时间间隔短于两个所发射的询问信号中的第一个的特定时间间隔,和/或如果两个所发射的询问信号的特定时间间隔中的至少一个短于或等于第二预定阈值(以及因此短于或等于车辆与移动识别发射器之间的距离),和/或如果车门传感器在两个所发射的询问信号中的第一个和第二个的发射之前的预定时间段内未检测到车辆的至少一个车门的打开、或者打开和关闭。
17.根据另一种配置,当识别出静态情况时,还可以设想包括另外的参数,以便有针对性地输出合适的控制命令。
18.车辆控制装置因此可以被配置为使用检测到的两个所发射的询问信号的特定时间间隔的变化小于或等于预定阈值作为第一标准,并且使用两个所发射的询问信号的特定时间间隔中的至少一个小于或等于时间阈值(并且因此移动识别发射器与车辆控制装置的距离小于或等于预定距离)作为第二标准,以输出用于车辆的驱动马达的起动命令。
19.此外,车辆控制装置可以被配置为使用检测到的两个所发射的询问信号的特定时间间隔的变化小于或等于预定阈值作为第一标准,并且使用两个所发射的询问信号的特定时间间隔中的至少一个大于时间阈值(并且因此移动与车辆控制装置的距离大于预定距离)作为第二标准,以便输出用于停用访问和/或起动功能的去停用命令。
20.根据另一种配置,移动识别发射器具有用于测量物理参数的传感器,其中,车辆控制装置进一步基于由移动识别发射器测量的物理参数来输出控制命令。例如,移动识别发射器的传感器可以包括用于检测移动/加速度的运动传感器、用于检测地球磁场的罗盘、和/或用于检测gps信号以确定位置的传感器。
21.可以设想,移动识别发射器是呈车辆的电子钥匙形式的移动识别发射器,或者是呈智能电话、智能手表或车辆的驾驶员或用户可以携带的任何其他可穿戴物品(“可穿戴装置”)形式的移动识别发射器。
22.根据本发明的另一方面,提供了一种具有根据上述表示的访问设备或其配置的车辆。这进一步提高了车辆的安全性和舒适性。
23.根据本发明的另一方面,提供了一种用于操作车辆的访问设备的方法,该方法具有以下步骤。该车辆向移动识别发射器发射多个询问信号。特别地,这些询问信号是一个接一个地发射的。此外,从移动识别发射器接收对应的响应信号,以响应所发射的询问信号。此外,确定在询问信号的发射与对应的响应信号的接收之间所经过的相应时间间隔。最后,该车辆基于两个所发射的询问信号的特定时间间隔的变化来输出不同的控制命令。
24.这些询问信号和这些响应信号尤其是根据uwb标准发射的。
25.该访问设备的有利配置只要可以应用于该车辆和该方法就也可以被认为是该车辆和该方法的有利配置,并且反之亦然。
26.说明书
27.以下将参照附图更详细地解释本发明的说明性实施例,在附图中:
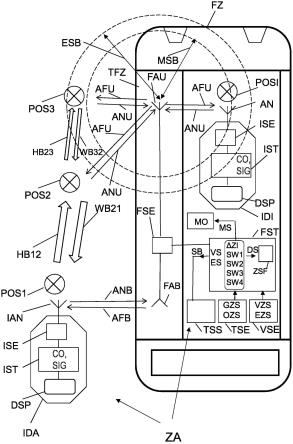
28.图1示出了根据本发明的实施例的用于车辆的访问设备的示意性表示;
29.图2示出了车辆发送和接收uwb信号的时序,以解释车辆的自动锁定;
30.图3示出了车辆发送和接收uwb信号的时序,以解释车辆的自动解锁;
31.图4示出了在关于便携式识别发射器的静态情况下车辆发送和接收uwb信号的时
序。
32.首先将参考图1,该图示出了用于车辆fz的被动式电子访问设备za,该车辆呈机动车辆的形式。规定车辆发射/接收装置fse作为访问设备za的车辆部分的中心部件。所述装置能够发射和接收两种不同类型的信号。首先,它被设计成经由车辆天线fab以预定时间间隔有规律地发射按时间顺序连续的询问信号。在这种情况下,询问信号afb由天线fab尤其是以相同或恒定的发射场强发射。这些询问信号afb用于在作为访问设备za的移动部分的移动识别发射器接近车辆时识别所述发射器,以便触发可以用于执行移动识别发射器对车辆的预验证或验证的问答对话。
33.在该示例中,移动识别发射器应该呈智能电话的形式,其首先具有用于驾驶员或用户的用户界面dsp,以及适用的无线电和控制部件,如下所述。
34.例如,如果这样的识别发射器ida接近车辆fz,则它在进入询问信号afb的检测范围时(当它在车辆的一定距离内时),将通过识别-发射器天线ian接收询问信号afb并将这些信号转发给识别-发射器发射/接收装置ise。对于(预)验证过程,识别发射器ida能够从识别-发射器控制装置ist的存储器中读取代码co,使得所述代码经由识别-发射器发射/接收装置ise和识别-发射器天线ian返回车辆(即返回天线fab)作为响应信号anb的一部分。
35.使用信号afb和anb的问答对话可以根据蓝牙标准、尤其是根据蓝牙低功耗(ble)标准进行,以确保以这种方式进行省电通信。
36.当移动识别发射器ida与车辆fz进行该初始接触时,它仍处于位置pos1,该位置距离车辆仍然太远而无法触发车辆fz的车门tfz的解锁过程。为此,识别发射器需要更靠近车辆。
37.如果从移动识别发射器ida发射到车辆fz的代码对应于尤其是存储在车辆控制装置fst的存储器装置(未示出)中的指定代码,则移动识别发射器ida已经肯定地执行了至少一次第一验证过程。基于该肯定的验证过程,车辆控制装置fst通知车辆发射/接收装置fse在移动识别发射器ida去往车辆的途中开始精确定位查找或定位(测距)该移动识别发射器。
38.现在假设移动识别发射器ida从其第一位置pos1沿箭头hb12朝第二位置pos2的方向移动,从而更靠近车辆。同时,车辆发射/接收装置fse将使用另外的部分开始定位查找,尤其是在确定移动识别发射器ida与车辆fz的距离的简单情况下。为此,车辆经由天线fau以另外的有规律的时间间隔发射另外的询问信号afu。这些另外的询问信号afu尤其是根据uwb(超宽带)标准来发射,目的是能够通过测量飞行时间来精确确定移动识别发射器ida与车辆fz(更具体地是其天线fau)之间的距离。
39.如果移动识别发射器ida现在位于位置pos2并且在询问信号afu的检测范围内,则它将使用其天线ian(或单独的uwb天线)来接收信号并将该信号转发给识别-发射器发射/接收装置ise。该识别-发射器发射/接收装置然后能够使用存储在识别-发射器控制装置ist的存储器中的签名sig来将对应的响应信号anu(再次呈uwb信号的形式)返回到车辆的uwb天线fau。然后可以在车辆发射/接收装置fse或车辆控制装置fst中计算询问信号afu的发送与响应信号anu的接收之间的时间。有利地,然后减去移动识别发射器处理询问信号afu和生成带有签名sig的响应信号anu所需的设想时间,并且车辆控制装置能够使用这样“清理后的”时间段来推断移动识别发射器ida与uwb天线fau的距离。如果规定在车辆fz上
有多个uwb天线(未示出),则可以使用三角测量来不仅确定移动识别发射器与车辆fz之间的距离,而且还确定移动识别发射器的精确位置。
40.现在进一步假设移动识别发射器ida继续处于动态情况,在动态情况中,它正在接近车辆并且正在从位置pos2沿箭头hb23的方向朝位置pos3移动。同样在该位置pos3中,移动识别发射器ida从车辆的uwb天线fau接收询问信号afu,以便随后用作为响应信号anu的一部分的适用的签名sig对这些询问信号进行响应。对于每个问答对话anu,车辆发射/接收装置fse或者尤其是下游车辆控制装置fst将测量信号的飞行时间,并因此能够使用该飞行时间来确定移动识别发射器与天线fau的位置之间的距离。
41.特别地,车辆控制装置fst因此能够确定移动识别发射器ida是否在解锁范围内,该解锁范围限定了在半径esb与车辆的uwb天线fau之间具有最大距离的空间区域。此外,车辆控制装置fst能够确定移动识别发射器是否位于发动机起动范围内,该发动机起动范围表示车辆的uwb天线fau周围具有最大半径或距离msb的空间区域。半径msb小于半径isb。
42.如图1右侧所示,移动识别发射器也可能位于车辆fz内部。这样的识别发射器然后被称为移动识别发射器idi,并且可以与车辆fz外部的识别发射器相同或分开,在这种情况下,它具有与车辆fz外部的移动识别发射器ida相同的部件。移动识别发射器idi也可以通过问答对话来定位,该问答对话通过信号afu的发射发起并通过签名响应信号anu的接收结束。因此,车辆控制装置fst能够识别出移动识别发射器idi位于posi位置(如图1所示),该位置在发动机起动范围内。如果移动识别发射器idi例如永久地位于设想的托盘中的位置posi,则移动识别发射器处于静态情况。
43.在这种静态情况下,可以设想,车辆控制装置fst将两个测量的时间间隔的变化δzi小于第一阈值sw1以及可能的其他条件作为向访问和起动单元zsf输出停用命令ds的基础,该停用命令用于停用访问和起动功能;或者相应地输出发动机起动命令ms,以便例如停用防盗器,从而起动驱动马达mo。
44.在以下的本发明说明书中,还将解释与车辆控制装置fst连接的其他车辆部件。这些部件包括用于锁定或解锁车辆车门tfz的中央锁定系统tss、用于感测车辆的至少一个车门(比如车门tfz)的打开状态或关闭状态的车门传感器tse、以及用于感测车辆的至少一个车门(比如车门tfz)的解锁状态或锁定状态的锁定传感器vse。可以设想,车辆控制装置fst能够向中央锁定系统tss发送控制命令sb,该控制命令包含锁定命令vs或解锁命令es。车门传感器tse被设计成将车门tfz的打开状态ozs或关闭状态gzs转发给车辆控制装置fst。相应地,锁定传感器vse被配置为向车辆控制装置fst发送传感器数据,比如车辆车门的锁定状态ezs或解锁状态ezs。
45.现在将参考图2,该图示出了根据本发明实施例的用于说明自动锁定过程的时序。这里假设,如图1中提到的,移动识别发射器(例如位于位置pos3)已经通过使用信号afb和anb的问答对话的方式完成了肯定的验证过程,并且车辆控制装置处于定位模式、或定位查找模式。在这种模式下,它以第一时间间隔z1有规律地发射询问信号afu。现在假设移动识别发射器ida背离车辆fz移动,例如从位置pos3沿着箭头wb32移动到位置pos2,并且从这里沿着箭头wb21移动到位置pos1。
46.对于图2的时序,这意味着车辆发射/接收装置fse在时刻t1r向移动识别发射器ida发射信号,所述发射器此时位于靠近车辆的位置pos3。相应地,询问信号afu和对应的响
应信号anu将各自具有短的飞行时间,因此车辆发射/接收装置fse在短时间间隔zi1内在时刻t1a接收到响应信号anu。短时间间隔zi1差不多表示移动识别发射器与车辆之间的短距离di1。
47.然后,在时刻t2r,车辆发射/接收装置fse向已经位于位置pos2的移动识别发射器ida(因为携带移动识别发射器的驾驶员已经离开)发射另外的询问信号afu。由于该位置比位置pos3离车辆fz更远,因此适用的询问信号和响应信号的飞行时间也将更长,所以直到接收到第二响应信号的时刻t2a为止的时间间隔zi2比时间间隔zi1长。相应地,由于更长的飞行时间,也识别出更大的距离di2。
48.在时刻t3r,车辆发射/接收装置向已经进一步远离车辆并且例如位于位置pos1的移动识别发射器ida发射另外的询问信号。移动识别发射器ida对该询问信号afu进行签名并返回响应信号anu,车辆发射/接收装置fse在时刻t3a接收到该响应信号。该第三时间间隔zi3现在比第二时间间隔zi2长,因此移动识别发射器ida与由此识别的车辆fz之间的距离di3也大于确定的距离di2。
49.车辆控制装置fst现在可以使用这些确定的时间间隔对上述车辆部件执行特定的控制过程。在最简单的情况下,车辆控制装置fst能够检查在所确定的时间间隔zi1、zi2和/或zi3之间是否出现了大于预定阈值sw1的变化δzi。例如,可以检查差值zi2-zi1是否大于阈值sw1,或者差值zi3-zi2是否大于阈值sw1。如果相应的差值大于阈值,这可以被称为移动识别发射器ida正在移动的动态情况。移动可以是朝向车辆或背离车辆的移动。假设最简单的情况,车辆控制装置fst能够在其基于至少两个连续询问信号afu的发射识别出两个测量的时间间隔的变化大于阈值sw1时输出锁定命令。
50.然而,还可以设想使用将控制命令sb输出到中央锁定系统tss的一个或多个另外的标准。例如,在确定两个测量的时间间隔之间的差值大于第一阈值sw1之后,还可以检查用于计算差值的时间间隔中的一个或两个是否大于绝对时间阈值sw2。该时间阈值再次表示车辆与移动识别发射器之间的一定距离。如果第一步骤由此识别出情况是动态的,即δzi大于sw1,并且用于计算差值的时间间隔大于绝对阈值sw2,用于前述差值计算(例如用于计算差值zi2-zi1)的时间间隔中没有一个尤其是大于第二阈值sw2,则识别出驾驶员正在离开车辆,因此所携带的移动识别发射器正在离开。然后,根据所示步骤的这些标准可以使车辆控制装置fst向中央锁定系统输出呈锁定信号vs形式的控制命令sb,使得其锁定车辆的所有车门。
51.现在将参考图3,该图示出了解锁车辆的情况。在这种情况下,车辆发射/接收装置fse以第一预定时间间隔z1在时刻t1r、t2r和t3r发射询问信号afu,所述信号由移动识别发射器ida发射,同时该移动识别发射器例如从时刻t1r的位置pos1经过时刻t2r的位置pos2移动到时刻t3r的位置pos3。由于朝向车辆fz或朝向车辆的uwb天线fau移动,飞行时间从最长飞行时间zi1经过平均飞行时间zi2缩短到最短飞行时间zi3,因为位置pos3最靠近车辆fz。相应地,使用飞行时间zi1、zi2和zi3确定的距离di1、di2和di3也变得更短。
52.如果再次计算测量的时间间隔之间的差值zi1-zi2和zi2-zi3,则这些差异都将大于阈值sw1,由此识别出动态情况。在最简单的情况下,这里还可以规定,当识别出动态情况时,从车辆控制装置fst向中央锁定系统tss输出解锁命令es作为控制命令sb(而不是图2中提到的锁定命令vs)。
53.然而,这里还可以设想使用输出解锁命令es的另外的标准。因此可以设想,在动态情况下,检查用于计算差值的时间间隔之一或所使用的两个时间间隔(比如时间间隔zi2或zi3)是否小于预定的另外的绝对时间阈值sw3。这意味着这里的目的是检查对应的uwb信号afu和anu的飞行时间是否短于预定时间,因此移动识别发射器在车辆fz的一定距离内。当然,这样的距离已经例如由用于限定解锁范围的半径esb规定,参见图1。因此,在确定动态情况以及用于计算差值的时间间隔中的至少一个小于另外的预定时间阈值sw3(并且移动识别发射器因此处于解锁范围内)的事实之后,可以向中央锁定系统tss输出解锁信号es作为控制命令sb,尤其是如果先前检查的并用于计算差值的时间间隔或所述时间间隔中的至少一个总是大于另外的时间阈值sw3。
54.最后,将参考图4,该图示出了静态情况。如上两图中已经提到的,车辆发射/接收装置fse将以第一预定时间间隔z1在时刻t1r、t2r和t3r发射询问信号afu。然而,现在将假设移动识别发射器没有移动,而是位于靠近车辆的uwb天线fau的位置。例如,它可以存放在特殊的托盘中。该托盘可以布置在位置posi处,由于其短距离,该位置在由半径msb限定的发动机起动范围内。
55.由于移动识别发射器idi不会在托盘中移动,因此测量的时间间隔zi1、zi2和zi3将几乎相同,因此zi1-zi2或zi2-zi3之间的差值将小于预定阈值sw1。在最简单的情况下,现在可以规定车辆控制装置fst在识别出静态情况时自动发起另外的验证过程,以便在结果是肯定的情况下停用防盗器或向驱动马达mo输出发动机起动信号ms。
56.然而,在此还可以设想再次考虑输出差异化控制命令的一个或多个附加标准。在识别出静态情况之后,因此还可以检查用于计算差值的时间间隔zi1、zi2或zi3中的一个或所有是否小于特定的另外的时间阈值sw4。在这种情况下,时间阈值sw4可以小于时间阈值sw3。此外,时间阈值sw4可以例如与限定发动机起动范围的半径msb相关,使得如果移动识别发射器在发动机起动范围内,则实现uwb信号afu和anu的小于阈值sw4的飞行时间。这将适用于位于托盘中位置posi处的移动识别发射器idi。
57.另一方面,如果在第一步骤中识别出静态情况,然后所有时间间隔zi1到zi3都被识别为大于预定阈值sw4,则可以假设适用的移动识别发射器可能被无意丢失或遗忘在车辆内或靠近车辆。相应地,车辆控制装置fst在这种情况下能够向访问/起动装置zsf发送停用信号ds,以便停用车辆上的适用的访问和/或起动功能。
58.除了对测量的飞行时间间隔zi1到zi3的特殊评估以及由此产生的用于对车辆部件进行差异化控制的适用的差异以外,还可以设想考虑上述传感器(比如车门传感器tse或锁定传感器vse)来决定要输出哪个控制命令。因此当识别出动态情况(飞行时间差计算δzi大于第一预定阈值sw1)时,可以设想检查锁定传感器vse输出哪个状态。如果是输出锁定状态vzs,则在识别出动态情况时可以自动输出解锁命令es,而当存在解锁状态ezs时可以自动输出锁定命令。
59.此外,可以设想车辆控制装置fst在预定时间段内通过车门传感器tsw首先检测车辆车门的打开、然后检测车辆车门的关闭,然后在多个询问信号afu被发射后,适用的飞行时间的变化或差值(飞行时间差计算)δzi大于第一阈值sw1。这些标准的存在表明驾驶员离开他的车辆fz并远离。因此,这些标准的存在可以用于输出自动锁定命令。
60.最后,要注意的是,作为问答对话的一部分,测量信号afu和anu的飞行时间允许执
行精确的位置或距离测量,因此增加了访问设备的安全性,并且不再能够执行作为所谓的中间人攻击(“中继攻击”)的一部分的无线电链路扩展。
61.此外,监测两个所发射的询问信号各自的时间间隔的变化使得可以对移动识别发射器的不同情况作出反应,并且车辆控制装置相应地能够输出适当的控制命令。这种监测可以以最小的设备费用来执行,因为如在图1中解释的情况下,这种对时间间隔的变化、或对车辆与移动识别发射器之间的距离的变化的监测可以在最简单的情况下仅用一个车辆发射/接收装置和一个识别-发射器发射/接收装置来执行,因此非常便宜。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1