一种基于深度学习的个性化车道保持辅助方法
1.本发明涉及车道保持辅助系统技术领域,具体为一种基于深度学习的个性化车道保持辅助方法。
背景技术:
2.车道保持辅助系统属于智能驾驶辅助系统中的一种,它可以在车道偏离预警系统(ldws)的基础上对转向系统进行控制辅助车辆保持在本车道内行驶,对车辆行驶时借助一个摄像头识别行驶车道的标识线将车辆保持在车道上提供支持,如果车辆接近识别到的标记线并可能脱离行驶车道,那么会通过方向盘的振动,或者是声音来提请驾驶员注意,并轻微转动方向盘修正行驶方向,使车辆处于正确的车道上,若方向盘长时间检测到无人主动干预,则发出报警,用来提醒驾驶人员。现有的车辆辅助系统不能将信号进行深度学习,不能对路面信息进行实时建模,所以有时候会出现偏离路线的问题。
技术实现要素:
3.(一)解决的技术问题针对现有技术的不足,本发明提供了一种基于深度学习的个性化车道保持辅助方法,以解决上述背景技术中提出的问题。
4.(二)技术方案为实现上述目的,本发明提供如下技术方案:一种基于深度学习的个性化车道保持辅助方法,包括以下步骤:步骤一:组件个性化车道保持辅助系统,该系统主要包括中央处理器、深度学习模块、模型建立模块和信号返回模块;步骤二:中央处理器收到信号返回模块的信号,且信号返回模块的信号根据车辆端的信号得出;步骤三:将深度学习模块的输入端与中央处理器的输出端信号连接;步骤四:深度学习模块对车辆端反馈的信息进行学习,从而构建出更优的车辆辅助方案;步骤五:经过步骤四之后,执行模块将信号通过信号发送模块发送给网络中转器;步骤六:紧接着,网络中转器将信号上传到网络服务器,网络服务器将数字信号进行存储,放在网络存储器中防止丢失;步骤七:信号发送到网络服务器之后信号发送给模型建立模块,模型建立模块将路面图片和视频信息转换成电子信号并且生成3d模型;步骤八:模型建立模块建立模型之后将模型的信号通过模型发送模块发送给车辆端,同时车辆端的行车电脑对画面进行分析,然后通过执行器控制车辆辅助系统进行工作。
5.优选的,所述车辆端安装在汽车上,并且同时在汽车的四周安装扫描摄像头,将路面信息进行扫描。
6.优选的,所述车辆上的扫描摄像头分别分布在汽车的底盘、后保险杠、前保险杠、侧裙和车顶,对周围环境进行360度无死角扫描,通过对车辆周围的路面进行扫描,从而最大程度避免路线偏移的情况发生。
7.优选的,所述车辆端的输出端与信号返回模块的输入端信号连接,所述信号返回模块的输出端与中央处理器的输入端信号连接,车辆端将路面信号收集之后然后通过信号返回模块再将信号发送个中央处理器进行处理,便于规划处更好的路线。
8.优选的,所述信号返回模块的信号端连接有信号稳流器;该信号稳流器用于将信号进行稳定,防止外部信号干扰。
9.优选的,所述信号返回模块的信号端连接有信号放大器;该信号放大器用于将信号放大。
10.优选的,所述信号返回模块的信号端连接有信号纠正器、信号稳压器和信号滤波器,信号纠正器用于将信号进行纠正,避免错误,信号滤波器可以将信号进行滤波,防止信号波动影响数据的正常传送。
11.与现有技术相比,本发明提供了一种基于深度学习的个性化车道保持辅助方法,具备以下有益效果:1、本发明通过车辆端的输出端与信号返回模块的输入端信号连接,信号返回模块的输出端与中央处理器的输入端信号连接,车辆端将路面信号收集之后然后通过信号返回模块再将信号发送个中央处理器进行处理,便于规划处更好的路线,并且通过深度学习模块可以对数据进行学习,以规划出更优的方案,解决了现有的车辆辅助系统不能将信号进行深度学习,不能对路面信息进行实时建模,有时候会出现偏离路线的问题。
12.2、本发明通过将深度学习模块的输入端与中央处理器的输出端信号连接,深度学习模块对车辆端反馈的信息进行学习,从而构建出更优的车辆辅助方案,之后,执行模块将信号通过信号发送模块发送给网络中转器,紧接着,网络中转器将信号上传到网络服务器,网络服务器将数字信号进行存储,放在网络存储器中防止丢失,从而为数据安全提供保障。
13.3、本发明通过信号发送到网络服务器之后信号发送给模型建立模块,模型建立模块将路面图片和视频信息转换成电子信号并且生成d模型,模型建立模块建立模型之后将模型的信号通过模型发送模块发送给车辆端,同时车辆端的行车电脑对画面进行分析,然后通过执行器控制车辆辅助系统进行工作,车辆端安装在汽车上,并且同时在汽车的四周安装扫描摄像头,将路面信息进行扫描,车辆上的扫描摄像头分别分布在汽车的底盘、后保险杠、前保险杠、侧裙和车顶,对周围环境进行度无死角扫描,通过对车辆周围的路面进行扫描,从而最大程度避免路线偏移的情况发生。
附图说明
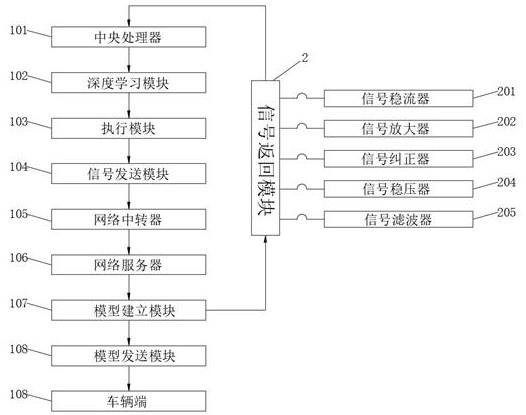
14.图1为本发明系统框图。
15.图中:中央处理器101、深度学习模块102、执行模块103、信号发送模块104、网络中转器105、网络服务器106、模型建立模块107、模型发送模块108、车辆端109、信号返回模块2、信号稳流器201、信号放大器202、信号纠正器203、信号稳压器204、信号滤波器205。
具体实施方式
16.请参阅图1:实施例一:一种基于深度学习的个性化车道保持辅助方法,包括以下步骤:步骤一:组件个性化车道保持辅助系统,该系统主要包括中央处理器101、深度学习模块102、模型建立模块107和信号返回模块2;步骤二:中央处理器101收到信号返回模块2的信号,且信号返回模块2的信号根据车辆端109的信号得出;步骤三:将深度学习模块102的输入端与中央处理器101的输出端信号连接;步骤四:深度学习模块102对车辆端109反馈的信息进行学习,从而构建出更优的车辆辅助方案;步骤五:经过步骤四之后,执行模块103将信号通过信号发送模块104发送给网络中转器105;步骤六:紧接着,网络中转器105将信号上传到网络服务器106,网络服务器106将数字信号进行存储,放在网络存储器中防止丢失;步骤七:信号发送到网络服务器106之后信号发送给模型建立模块107,模型建立模块107将路面图片和视频信息转换成电子信号并且生成3d模型;步骤八:模型建立模块107建立模型之后将模型的信号通过模型发送模块108发送给车辆端109,同时车辆端109的行车电脑对画面进行分析,然后通过执行器控制车辆辅助系统进行工作。
17.车辆端109安装在汽车上,并且同时在汽车的四周安装扫描摄像头,将路面信息进行扫描。
18.车辆上的扫描摄像头分别分布在汽车的底盘、后保险杠、前保险杠、侧裙和车顶,对周围环境进行360度无死角扫描,通过对车辆周围的路面进行扫描,从而最大程度避免路线偏移的情况发生。
19.车辆端109的输出端与信号返回模块2的输入端信号连接,信号返回模块2的输出端与中央处理器101的输入端信号连接,车辆端109将路面信号收集之后然后通过信号返回模块2再将信号发送个中央处理器101进行处理,便于规划处更好的路线。
20.信号返回模块2的信号端连接有信号稳流器201;该信号稳流器201用于将信号进行稳定,防止外部信号干扰。
21.实施例二:一种基于深度学习的个性化车道保持辅助方法,包括以下步骤:步骤一:组件个性化车道保持辅助系统,该系统主要包括中央处理器101、深度学习模块102、模型建立模块107和信号返回模块2;步骤二:中央处理器101收到信号返回模块2的信号,且信号返回模块2的信号根据车辆端109的信号得出;步骤三:将深度学习模块102的输入端与中央处理器101的输出端信号连接;步骤四:深度学习模块102对车辆端109反馈的信息进行学习,从而构建出更优的车辆辅助方案;
步骤五:经过步骤四之后,执行模块103将信号通过信号发送模块104发送给网络中转器105;步骤六:紧接着,网络中转器105将信号上传到网络服务器106,网络服务器106将数字信号进行存储,放在网络存储器中防止丢失;步骤七:信号发送到网络服务器106之后信号发送给模型建立模块107,模型建立模块107将路面图片和视频信息转换成电子信号并且生成3d模型;步骤八:模型建立模块107建立模型之后将模型的信号通过模型发送模块108发送给车辆端109,同时车辆端109的行车电脑对画面进行分析,然后通过执行器控制车辆辅助系统进行工作。
22.车辆端109安装在汽车上,并且同时在汽车的四周安装扫描摄像头,将路面信息进行扫描。
23.车辆上的扫描摄像头分别分布在汽车的底盘、后保险杠、前保险杠、侧裙和车顶,对周围环境进行360度无死角扫描,通过对车辆周围的路面进行扫描,从而最大程度避免路线偏移的情况发生。
24.车辆端109的输出端与信号返回模块2的输入端信号连接,信号返回模块2的输出端与中央处理器101的输入端信号连接,车辆端109将路面信号收集之后然后通过信号返回模块2再将信号发送个中央处理器101进行处理,便于规划处更好的路线。
25.信号返回模块2的信号端连接有信号稳流器201;该信号稳流器201用于将信号进行稳定,防止外部信号干扰。
26.信号返回模块2的信号端连接有信号放大器202;该信号放大器202用于将信号放大。
27.实施例三:一种基于深度学习的个性化车道保持辅助方法,包括以下步骤:步骤一:组件个性化车道保持辅助系统,该系统主要包括中央处理器101、深度学习模块102、模型建立模块107和信号返回模块2;步骤二:中央处理器101收到信号返回模块2的信号,且信号返回模块2的信号根据车辆端109的信号得出;步骤三:将深度学习模块102的输入端与中央处理器101的输出端信号连接;步骤四:深度学习模块102对车辆端109反馈的信息进行学习,从而构建出更优的车辆辅助方案;步骤五:经过步骤四之后,执行模块103将信号通过信号发送模块104发送给网络中转器105;步骤六:紧接着,网络中转器105将信号上传到网络服务器106,网络服务器106将数字信号进行存储,放在网络存储器中防止丢失;步骤七:信号发送到网络服务器106之后信号发送给模型建立模块107,模型建立模块107将路面图片和视频信息转换成电子信号并且生成3d模型;步骤八:模型建立模块107建立模型之后将模型的信号通过模型发送模块108发送给车辆端109,同时车辆端109的行车电脑对画面进行分析,然后通过执行器控制车辆辅助系统进行工作。
28.车辆端109安装在汽车上,并且同时在汽车的四周安装扫描摄像头,将路面信息进行扫描。
29.车辆上的扫描摄像头分别分布在汽车的底盘、后保险杠、前保险杠、侧裙和车顶,对周围环境进行360度无死角扫描,通过对车辆周围的路面进行扫描,从而最大程度避免路线偏移的情况发生。
30.车辆端109的输出端与信号返回模块2的输入端信号连接,信号返回模块2的输出端与中央处理器101的输入端信号连接,车辆端109将路面信号收集之后然后通过信号返回模块2再将信号发送个中央处理器101进行处理,便于规划处更好的路线。
31.信号返回模块2的信号端连接有信号稳流器201;该信号稳流器201用于将信号进行稳定,防止外部信号干扰。
32.信号返回模块2的信号端连接有信号放大器202;该信号放大器202用于将信号放大。
33.信号返回模块2的信号端连接有信号纠正器203、信号稳压器204和信号滤波器205,信号纠正器203用于将信号进行纠正,避免错误,信号滤波器205可以将信号进行滤波,防止信号波动影响数据的正常传送。
34.在使用时,组件个性化车道保持辅助系统,该系统主要包括中央处理器101、深度学习模块102、模型建立模块107和信号返回模块2,中央处理器101收到信号返回模块2的信号,且信号返回模块2的信号根据车辆端109的信号得出,将深度学习模块102的输入端与中央处理器101的输出端信号连接,深度学习模块102对车辆端109反馈的信息进行学习,从而构建出更优的车辆辅助方案,经过步骤四之后,执行模块103将信号通过信号发送模块104发送给网络中转器105,紧接着,网络中转器105将信号上传到网络服务器106,网络服务器106将数字信号进行存储,放在网络存储器中防止丢失,信号发送到网络服务器106之后信号发送给模型建立模块107,模型建立模块107将路面图片和视频信息转换成电子信号并且生成3d模型,模型建立模块107建立模型之后将模型的信号通过模型发送模块108发送给车辆端109,同时车辆端109的行车电脑对画面进行分析,然后通过执行器控制车辆辅助系统进行工作。
35.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1