车辆、程序和通知方法与流程
1.本公开涉及车辆、程序和通知方法,更具体地,涉及设置有执行用于致使实际速度跟随目标速度的速度控制的自动驾驶系统的车辆,以及要用于该车辆的合适的程序和通知方法。
背景技术:
2.当车辆在长下坡道路上行驶时,车辆可能由于制动器的大量使用而达到制动器衰减状态。第2005-028896号日本未审查专利申请公开(jp 2005-028896 a)公开了,当在执行跟随行驶控制的同时预测要发生制动器衰减状态时,通过将跟随行驶控制的控制特性变更为具有更小加速度变化的控制特性来抑制导致需要生成制动力的状况。
技术实现要素:
3.在装备有自动驾驶系统的车辆中,依据行动计划设定目标速度,并且执行速度控制以使得致使实际速度跟随目标速度。当在该速度控制中目标速度与实际速度之间的速度误差超过阈值时,向驾驶员提供通知。向驾驶员的通知包括,例如,请求驾驶员触摸方向盘的手控(hands-on)请求通知,以及向驾驶员通知将驾驶权限从自动驾驶系统转移到驾驶员的请求的转变需求(transition demand,td)通知。
4.当在jp 2005-028896 a中描述的技术应用于自动驾驶系统时,随着制动力的生成频率的降低,实际速度相对于目标速度的跟随性降低。结果,目标速度与实际速度之间的速度误差超过阈值的情形增加,并且向驾驶员的通知的频率也增加。然而,在这种情况下目标速度与实际速度之间的速度误差的增加是暂时的以抑制制动器衰减。也就是说,即使当实际速度相对于目标速度的跟随性降低时,这样的减小也在作为自动驾驶系统的驾驶员辅助功能的可允许范围内,并且可能不必要向驾驶员提供通知。不总是必要的频繁通知可能会令驾驶员烦恼。
5.本公开的目的是提供一种技术,该技术能够在由自动驾驶系统执行速度控制的同时实际速度相对于目标速度的跟随性降低时,优化向驾驶员发出通知的频率。
6.本公开提供了用于实现上述目的的车辆。根据本公开的车辆是装备有执行致使实际速度跟随目标速度的速度控制的自动驾驶系统的车辆。根据本公开的车辆中包括的自动驾驶系统包括存储至少一个程序的至少一个存储器,以及连接到至少一个存储器的至少一个处理器。至少一个处理器通过执行至少一个程序来执行如下所述的控制模式切换处理、通知处理、第一阈值变更处理和第二阈值变更处理。
7.控制模式切换处理是依据驾驶状况在第一控制模式与第二控制模式之间切换速度控制的控制模式的处理,第一控制模式为通过制动器的主动使用而致使实际速度跟随目标速度的模式,第二控制模式为在抑制制动器的使用的同时致使实际速度跟随目标速度的模式。通知处理是在执行速度控制的同时,当目标速度与实际速度之间的速度误差超过阈值时,向驾驶员提供通知的处理。第一阈值变更处理是当控制模式从第一控制模式切换到
第二控制模式时,将阈值变更为比第一控制模式中的值大的值的处理。第二阈值变更处理是当控制模式从第二控制模式切换到第一控制模式时,将阈值变更为比第二控制模式中的值小的值的处理。
8.在根据本公开的车辆中,在第二阈值变更处理中,阈值可以逐渐变更为比第二控制模式中的值小的值。进一步地,在第一阈值变更处理中,阈值可以逐渐变更为比第一控制模式中的值大的值。
9.本公开提供了用于实现上述目的的程序。根据本公开的程序是致使计算机向装备有执行速度控制以致使实际速度跟随目标速度的自动驾驶系统的车辆的驾驶员在当目标速度与实际速度之间的速度误差超过阈值时执行通知的程序。这里,速度控制的控制模式包括第一控制模式和第二控制模式,在第一控制模式中,通过制动器的主动使用而致使实际速度跟随目标速度,在第二控制模式中,在抑制制动器的使用的同时致使实际速度跟随目标速度。
10.根据本公开的程序致使计算机执行当控制模式从第一控制模式切换到第二控制模式时,将阈值变更为比第一控制模式中的值大的值的处理。进一步地,根据本公开的程序致使计算机执行当控制模式从第二控制模式切换到第一控制模式时,将阈值变更为比第二控制模式中的值小的值的处理。
11.本公开提供了用于实现上述目的的通知方法。根据本公开的通知方法是用于向装备有执行速度控制以致使实际速度跟随目标速度的自动驾驶系统的车辆的驾驶员在当目标速度与实际速度之间的速度误差超过阈值时提供通知的方法。这里,速度控制的控制模式包括第一控制模式和第二控制模式,在第一控制模式中,通过制动器的主动使用而致使实际速度跟随目标速度,在第二控制模式中,在抑制制动器的使用的同时致使实际速度跟随目标速度。
12.根据本公开的通知方法包括第一步骤和第二步骤。第一步骤是当控制模式从第一控制模式切换到第二控制模式时,将阈值变更为比第一控制模式中的值大的值的步骤。第二步骤是当控制模式从第二控制模式切换到第一控制模式时,将阈值变更为比第二控制模式中的值小的值的步骤。
13.根据本公开的车辆、程序和通知方法,当在其中通过制动器的主动使用而致使实际速度跟随目标速度的第一控制模式被选择作为速度控制的控制模式时,阈值被设定为相对小的值。在另一方面,当在其中在抑制制动器的使用的同时致使实际速度跟随目标速度的第二控制模式被选择作为速度控制的控制模式时,阈值被设定为相对大的值。
14.第一控制模式是在其中通过制动器的主动使用来实现相对高的目标速度跟随性能的控制模式。因此,目标速度与实际速度之间的速度误差相对不太容易发生。根据本公开的车辆、程序和通知方法,将阈值设定为相对小的值使得能够抑制自动驾驶系统的故障被忽视。第二控制模式是在其中在抑制制动器的使用的同时目标速度跟随性能比第一控制模式相对降低的控制模式。因此,目标速度与实际速度之间的速度误差相对较容易发生。根据本公开的车辆、程序和通知方法,将阈值设定为相对大的值使得能够抑制频繁发出不总是必要的通知。也即,根据本公开的车辆、程序和通知方法,当在由自动驾驶系统执行速度控制的同时实际速度相对于目标速度的跟随性降低时,能够优化向驾驶员提供通知的频率。
附图说明
15.下面将参照附图描述本发明的示例性实施例的特征、优点和技术以及工业意义,其中相同的标记表示相同的要素,并且其中:图1为示出根据本公开的第一实施例的车辆中包括的自动驾驶系统的配置的框图;图2为示出根据本公开的第一实施例的用于确定由车辆中包括的自动驾驶系统执行的速度控制的控制模式的方法的流程图;图3为图示出当控制模式被切换时出现的问题的图;图4为示出根据本公开的第一实施例的阈值设定的图;图5为图示出当控制模式被切换时出现的问题的图;图6为示出根据本公开的第二实施例的阈值设定的图;图7为图示出当控制模式被切换时出现的问题的图;图8为示出根据本公开的第三实施例的阈值设定的图;以及图9为示出图8中所示的阈值设定的变形的图。
具体实施方式
16.在下文中,将参考附图描述本公开的实施例。然而,当在下面所示的实施例中提及每个要素的数量、数目、量、范围等时,除非当已在原则上明确地声明或明确地以数量指定时,本公开的构思不限于本文中提到的数量。另外,除非当已在原则上明确地声明或明确地指定时,在下面所示的实施例中描述的结构等对于本公开的构思来说不一定是必要的。1.第一实施例1-1.具有自动驾驶系统的车辆配置
17.图1为示出根据本公开的第一实施例的车辆中包括的自动驾驶系统的配置的框图。车辆10中包括的自动驾驶系统100是设置有至少一个处理器102(在下文中简称为“处理器102”)和至少一个内存104(在下文中简称为“内存104”)的电子控制单元(electronic control unit,ecu),即计算机。内存104包括主存储装置和辅助存储装置。内存104存储能够由处理器102执行的至少一个程序106(在下文中简称为“程序106”)以及与其相关的各种数据。当处理器102执行存储于内存104中的程序106时,在自动驾驶系统100中实现各种功能。构成自动驾驶系统100的ecu可以是多个ecu的组。
18.如由图1中的框所示的,自动驾驶系统100具有系统状态控制单元110、周边识别单元120、行动计划生成单元130、速度控制单元140和系统状态通知单元150,作为与车辆10的自动驾驶相关的配置。当由处理器102执行存储于内存104中的程序106时,上述单元被实现为自动驾驶系统100的功能。
19.系统状态控制单元110配置为与周边识别单元120、行动计划生成单元130、速度控制单元140和系统状态通知单元150中的每一者通信。
20.周边识别单元120使用诸如相机、光检测与测距(light detection and ranging,lidar)或雷达的识别传感器(未图示)来执行对车辆10的周边状况的识别,并获取前方车辆、行人等的目标信息。由于通过识别传感器获取目标信息的方法是已知的,因此在此省略其描述。
21.行动计划生成单元130基于地图数据库的地图信息、使用全球定位系统(global positioning system,gps)获取的车辆10的位置信息以及由周边识别单元120获取的目标信息来生成用于车辆10的行动计划。行动计划包括用于致使车辆10沿着预设行驶路线行驶的目标轨迹和行动计划的内容。目标轨迹被生成为具有多个由两个要素构成的集合:在固定至车辆10的坐标系中的目标位置和在每个目标点处的目标速度。行动计划的内容是对应于自动驾驶的速度控制的目的的内容。行动计划的内容是依据诸如以恒定速度行驶、在弯道上减速、跟随前方车辆以及在长下坡道路上行驶的驾驶状况而确定的。
22.速度控制单元140基于由行动计划生成单元130生成的行动计划来控制车辆10的速度。行动计划包括目标轨迹。速度控制单元140确定目标驱动力和目标加速度,以使得车辆10沿着目标轨迹行驶。更具体地,速度控制单元140计算目标轨迹中包括的目标速度与由车轮速度传感器测量的车辆10的实际速度之间的速度误差,并确定目标驱动力和目标加速度以减小该速度误差。
23.速度控制单元140基于行动计划的内容来执行用于切换速度控制的控制模式的控制模式切换处理。控制模式包括第一控制模式和第二控制模式,并且,用于根据速度误差确定目标驱动力和目标加速度的计算方法对于每个控制模式而言是不同的。具体地,在第一控制模式中,目标驱动力和目标加速度被确定为使得通过主动地使用制动器致使实际速度跟随目标速度。在另一方面,在第二控制模式中,目标驱动力和目标加速度被确定为使得在抑制制动器的使用的同时致使实际速度跟随目标速度。稍后将详细描述用于确定速度控制的控制模式的方法。
24.由速度控制单元140确定的目标驱动力和目标加速度被发送至执行器ecu 300。执行器ecu 300对控制驱动系统的驱动力和制动力进行控制,以实现目标驱动力和目标加速度。控制驱动系统例如包括,诸如电动马达、引擎的动力装置,以及能够对控制驱动力进行控制的混合动力系统,以及能够对制动力进行控制的电子制动器控制系统。
25.当目标速度与实际速度之间的速度误差变大时,存在由于环境条件或自动驾驶系统100的故障导致自动驾驶系统100可能不能继续自动驾驶的可能性。因此,速度控制单元140执行速度控制以致使实际速度跟随目标速度,并且与此同时,基于目标速度和实际速度之间的速度误差来执行手控请求判定和td判定。手控请求判定是关于是否请求驾驶员执行手控的判定。td判定是关于是否请求将驾驶权限从自动驾驶系统100转移到驾驶员(td)的判定。
26.在手控请求判定中,速度控制单元140将速度误差与预定的手控请求阈值进行比较。当速度误差超过手控请求阈值时,手控请求被输出到速度控制单元140和系统状态控制单元110。在td判定中,速度控制单元140将速度误差与预定的td阈值进行比较。td阈值被设定为比手控请求阈值大的值。因此,速度误差总是在速度误差超过手控请求阈值之后超过td阈值。当速度误差超过td阈值时,td被输出到速度控制单元140和系统状态控制单元110。如稍后将详细描述的,依据控制模式来变更手控请求阈值和td阈值的设定。
27.系统状态通知单元150执行通知处理。具体地,当系统状态控制单元110从速度控制单元140接收到手控请求时,系统状态控制单元110向系统状态通知单元150发送命令。系统状态通知单元150接收来自系统状态控制单元110的命令,并向仪表ecu 200输出手控请求通知。类似地,当系统状态控制单元110从速度控制单元140接收到td时,系统状态控制单
元110向系统状态通知单元150发送命令。系统状态通知单元150响应于来自系统状态控制单元110的命令而向仪表ecu 200输出td通知。仪表ecu 200是控制向驾驶员通知系统状态的显示器的ecu。1-2.用于确定速度控制的控制模式的方法
28.在自动驾驶系统100中,目标速度是依据行动计划的内容而设定的。例如,在没有前方车辆的笔直道路上,以由驾驶员设定的设定车速作为目标车速来执行跟随控制。在另一方面,当存在比由驾驶员设定的设定车速更慢的前方车辆时,以基于前方车辆的速度设定的速度作为目标车速来执行跟随控制,以跟随前方车辆。即使当前方车辆插入到车辆10的前方时,也基于插入的前方车辆的速度来设定目标车速。此外,在弯曲道路上,可能存在以比由驾驶员设定的设定车速更慢的速度作为目标车速来执行跟随控制使得车辆能够安全地在弯曲道路上行驶的情况。大致而言,可以将自动驾驶系统100的行动计划的内容分类为简单地控制车速以跟随由驾驶员设定的设定车速的内容(行动计划内容1)和控制车速以跟随依据周围状况而变更的目标车速的内容(行动计划内容2)。
29.图2为示出用于确定由自动驾驶系统100执行的速度控制的控制模式的方法的流程图。在步骤s100中,判定是否正在执行跟随控制以跟随由驾驶员设定的设定车速,即速度控制是否是依据上述行动计划内容1来执行的。
30.作为步骤s100中的判定的结果,当速度控制是依据行动计划内容2而不是行动计划内容1执行的时,执行步骤s300。在步骤s300中,选择第一控制模式作为速度控制的控制模式。在第一控制模式中,确定目标驱动力和目标加速度以使得通过制动器的主动使用而致使实际速度跟随目标速度。在第一控制模式中的速度控制的执行使得能够实现相对于依据周围状况而变更的目标速度的高的速度跟随性能。
31.在另一方面,作为步骤s100中的判定的结果,当速度控制是依据行动计划内容1执行的时,执行步骤s200。在步骤s200中,进一步判定是否满足第二控制模式的可选条件。行动计划内容1包括满足第二控制模式的可选条件的内容(行动计划内容3)。在步骤s200中,判定行动计划内容1是否是行动计划内容3。
32.在第二控制模式中,执行速度控制,以在抑制制动器的使用的同时致使实际速度跟随目标速度。因此,当选择了第二控制模式时,不主动地使用制动器,从而与当选择了第一控制模式时相比降低了相对于目标速度的速度跟随性能。尽管如此,作为选择第二控制模式存在优点的情况,例如,可以例示车辆10在长下坡道路上行驶的情况。可能存在在长下坡道路上制动器的大量使用可能致使制动器衰减状态的情况。然而,当选择了第二控制模式时,能够抑制制动器的使用,因此能够抑制制动器被置于制动器衰减状态中。行动计划内容3的示例是,在长下坡道路上跟随控制被简单地执行为跟随由驾驶员设定的设定车速。
33.作为步骤s200中的判定的结果,当不满足第二控制模式的可选条件时,即,当不满足依据上述行动计划内容3的速度控制的执行条件时,执行步骤s300。执行步骤s300以执行第一控制模式中的速度控制,使得能够抑制相对于目标速度的速度跟随性能被不必要地降低。在另一方面,作为步骤s200中的判定的结果,当满足第二控制模式的可选条件时,执行步骤s400。在步骤s400中,选择第二控制模式作为速度控制的控制模式。例如,第二控制模式的选择使得能够在当车辆10在长下坡道路上行驶时抑制制动器被置于制动器衰减状态中。
1-3.每个控制模式中的阈值设定
34.接下来,将参照图3和图4描述如上所述确定的每个控制模式中的阈值的设定。图3和图4各自示出当控制模式从第一控制模式切换到第二控制模式并且然后再次从第二控制模式切换到第一控制模式时的速度误差随着时间的变化的示例。然而,图3中所示的速度误差随着时间的变化与图4中所示的速度误差随着时间的变化相同。
35.第二控制模式的速度跟随性能与第一控制模式的速度跟随性能相比降低了。因此,速度误差容易变大。然而,暂时地致使在这种情况下的速度误差增加以抑制制动器被置于制动器衰减状态中。因此,即使当速度误差增加时,取决于速度误差的程度,该增加也可以在针对自动驾驶系统100的驾驶员辅助功能的可允许范围内。
36.然而,当如图3中所示无论控制模式如何手控请求阈值均为恒定时,则当控制模式是第二控制模式时,速度误差可能容易超过手控请求阈值。在这种情况下,频繁地向驾驶员提供原本不必要的手控请求通知可能会使驾驶员烦恼。此外,假定图3中所示无论控制模式如何td阈值均为恒定,则当控制模式是第二控制模式时,速度误差可能容易超过td阈值。在这种情况下,尽管手控请求通知是足够的,但是仍向驾驶员提供td通知,这可能致使驾驶员执行原本不必要的人工驾驶。
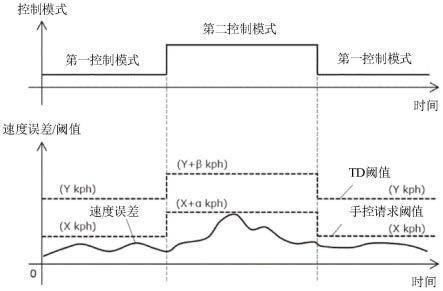
37.为了解决参照图3描述的问题,在第一实施例中,如图4中所示设定每个阈值。首先,手控请求阈值被设定为在第二控制模式中比在第一控制模式中更大。具体地,第一控制模式中的手控请求阈值被设定为x[kph],而第二控制模式中的手控请求阈值被设定为x+α[kph],比第一控制模式中的手控请求阈值大α[kph]。
[0038]
td阈值大于手控请求阈值,并且第二控制模式中的td阈值大于第一控制模式中的td阈值。具体地,第一控制模式中的td阈值被设定为y[kph],而第二控制模式中的td阈值被设定为y+β[kph],比第一控制模式中的td阈值大β[kph]。y大于x,y+β大于x+α。
[0039]
当通过设定如上所述的每个阈值而将控制模式从第一控制模式切换到第二控制模式时,手控请求阈值和td阈值分别变更为比第一控制模式中的值大的值。在下文中,由自动驾驶系统100执行的处理称为第一阈值变更处理。具体地,在根据第一实施例的第一阈值变更处理中,每个阈值以阶跃函数的方式增加。此外,当控制模式从第二控制模式切换到第一控制模式时,手控请求阈值和td阈值分别变更为比第二控制模式中的值小的值。在下文中,由自动驾驶系统100执行的处理称为第二阈值变更处理。具体地,在根据第一实施例的第二阈值变更处理中,每个阈值以阶跃函数的方式降低。
[0040]
即使当由于通过将第二控制模式中的手控请求阈值的值增加至大于第一控制模式中的值而从第一控制模式切换到第二控制模式而导致速度误差增加时,也抑制了速度误差超过手控请求阈值。通过此配置,能够抑制驾驶员接收不总是必要的通知。此外,将第二控制模式中的td阈值的值增加至大于第一控制模式中的值,使得能够抑制在当控制模式切换到第二控制模式时不管手控请求通知是足够的状况但是驾驶员仍然接收td通知。2.第二实施例
[0041]
接下来,将描述根据本公开的第二实施例。然而,在根据第二实施例的车辆中包括的自动驾驶系统的配置与第一实施例的配置相同,并且由图1中所示的框图代表。此外,在第二实施例中,依据与第一实施例共同的图2中的流程图来确定速度控制的控制模式。第二实施例与第一实施例的不同之处在于每个控制模式中阈值的设定。
[0042]
图5和图6各自示出当控制模式从第一控制模式切换到第二控制模式并且然后再次从第二控制模式切换到第一控制模式时的速度误差随着时间的变化的示例。然而,图5中所示的速度误差随着时间的变化与图6中所示的速度误差随着时间的变化相同。
[0043]
图5中所示的阈值的设定是根据第一实施例的阈值的设定。手控请求阈值设定为在第二控制模式中比在第一控制模式中更大。td阈值大于手控请求阈值,并且第二控制模式中的td阈值大于第一控制模式中的td阈值。通过如上所述的每个阈值的设定,即使当由于从第一控制模式切换到第二控制模式而导致速度误差增加时,也抑制了速度误差超过手控请求阈值,并且进一步抑制了速度误差超过td阈值。
[0044]
然而,即使当控制模式再次切换到第一控制模式时,第二控制模式中增加的速度误差也不会立即收敛。因此,如图5所示,当响应于从第二控制模式到第一控制模式的切换而以阶跃函数的方式降低手控请求阈值时,速度误差暂时超过手控请求阈值,因此,向驾驶员发出手控请求通知。然而,当没有发生系统故障等时,速度误差随着从切换到第一控制模式起时间经过而收敛。因此,即使当在切换到第一控制模式之后紧接着出现了速度误差时,也期望避免提供手控请求通知,除非速度误差的出现持续了长时间。这同样适用于当速度误差超过td阈值时做出的td通知。
[0045]
为了解决图5中描述的问题,根据第二实施例,如图6中所示设定了每个阈值。首先,当控制模式从第一控制模式切换到第二控制模式时,通过执行第一阈值变更处理,手控请求阈值和td阈值被分别变更为比第一控制模式中的值大的值。类似于第一实施例的,在根据第二实施例的第一阈值变更处理中,每个阈值以阶跃函数的方式增加。
[0046]
接下来,当控制模式再次从第一控制模式切换到第二控制模式时,通过执行第二阈值变更处理,手控请求阈值和td阈值分别返回至比第二控制模式中的值低的值。然而,在根据第一实施例的第二阈值变更处理中,每个阈值以阶跃函数的方式降低,而在根据第二实施例的第二阈值变更处理中,每个阈值在预定的阈值渐变时段中逐渐降低。
[0047]
在控制模式从第二控制模式切换到第一控制模式之后,在第二控制模式中增加的速度误差需要一定量的时间来收敛。根据第二实施例,在第二控制模式从第二控制模式切换到第一控制模式之后,逐渐降低手控请求阈值以使得能够抑制暂时增加的速度误差超过手控请求阈值。通过此配置,能够抑制驾驶员频繁地接收不总是必要的手控请求通知。此外,在控制模式切换到第一控制模式之后逐渐降低td阈值,使得能够抑制当即使在控制模式切换到第一控制模式之后速度误差仍增加时不管手控请求通知是足够的状况但是驾驶员仍然接收td通知。3.第三实施例
[0048]
接下来,将描述根据本公开的第三实施例。然而,在根据第三实施例的车辆中包括的自动驾驶系统的配置与第一实施例的配置相同,并且由图1中所示的框图代表。此外,在第三实施例中,依据与第一实施例共同的图2中的流程图来确定速度控制的控制模式。第三实施例与第一实施例和第二实施例的不同之处在于每个控制模式中阈值的设定。
[0049]
图7和图8各自示出当控制模式从第一控制模式切换到第二控制模式并且然后再次从第二控制模式切换到第一控制模式时的速度误差随着时间的变化的示例。然而,图7中所示的速度误差随着时间的变化与图8中所示的速度误差随着时间的变化相同。
[0050]
图7中所示的阈值的设定是根据第二实施例的阈值的设定。手控请求阈值设定为
在第二控制模式中比在第一控制模式中更大。td阈值大于手控请求阈值,并且第二控制模式中的td阈值大于第一控制模式中的td阈值。通过如上所述的每个阈值的设定,即使当由于从第一控制模式切换到第二控制模式而导致速度误差增加时,也抑制了速度误差超过手控请求阈值,并且进一步抑制了速度误差超过td阈值。
[0051]
然而,存在在第一控制模式的阶段速度误差已经超过手控请求阈值,并且在提供手控请求通知的同时控制模式从第一控制模式切换到第二控制模式的可能性。在此情况下,当响应于从第一控制模式到第二控制模式的切换而以阶跃函数的方式增加手控请求阈值时,速度误差落入手控请求阈值内,并且因此,取消手控请求通知。在第一控制模式阶段向驾驶员发出的手控请求通知是由于系统故障等而导致的必要的手控请求通知。因此,不期望由于控制模式切换到第二控制模式而取消手控请求通知。这同样适用于当速度误差超过td阈值时做出的td通知。
[0052]
为了解决图7中描述的问题,根据第三实施例,如图8中所示设定了每个阈值。首先,当控制模式从第一控制模式切换到第二控制模式时,通过执行第一阈值变更处理,手控请求阈值和td阈值被分别变更为比第一控制模式中的值大的值。然而,在根据第一实施例和第二实施例的第一阈值变更处理中,每个阈值以阶跃函数的方式增加,而在根据第三实施例的第一阈值变更处理中,每个阈值在预定的阈值渐变时段中逐渐增加。
[0053]
接下来,当控制模式再次从第二控制模式切换到第一控制模式时,通过执行第二阈值变更处理,手控请求阈值和td阈值分别变更为比第二控制模式中的值小的值。类似于第二实施例的,在根据第三实施例的第二阈值变更处理中,每个阈值在预定的阈值渐变时段中逐渐降低。
[0054]
当在第一控制模式中的速度控制期间发生的速度误差不是暂时误差而是由系统故障而导致的时,即使在控制模式从第二控制模式切换到第一控制模式之后,该速度误差也会继续发生。当速度误差是由系统故障导致的时,优选地,向驾驶员发出手控请求以准备从自动驾驶切换到人工驾驶。根据第三实施例,在控制模式从第一控制模式切换到第二控制模式之后,手控请求阈值逐渐增加,使得速度误差超过手控请求阈值的时段,即手控请求通知被提供给驾驶员的时段被延长。这使得驾驶员更容易注意到手控请求通知,并且允许驾驶员对切换到人工驾驶做出准备。此外,在控制模式切换到第二控制模式之后的td阈值的逐渐增加,在继续发出td通知直到即将切换到第二控制模式之前的情况下,延长了向驾驶员发出td通知的时段。这使得驾驶员更容易注意到td通知,由此可以将驾驶权限从自动驾驶系统100快速地转移到驾驶员。
[0055]
可能存在这样的情况:当在控制模式从第一控制模式切换到第二控制模式之后每个阈值逐渐增加时,在阈值渐变时段内控制模式再次切换到第一控制模式。在此情况下,例如,每个阈值可以如图9中所示地变更。当控制模式从第一控制模式切换到第二控制模式时,下一次何时返回到第一控制模式是未知的。因此,在预定的阈值渐变时段中,手控请求阈值以从x[kph]增加到x+α[kph]的速率变更。此外,在预定的阈值渐变时段中,td阈值以从y[kph]增加到y+β[kph]的速率变更。然后,当在阈值渐变时段内控制模式从第二控制模式切换到第一控制模式时,手控请求阈值从该时刻开始在预定的阈值渐变时段中降低至x[kph],并且td阈值在预定的阈值渐变时段中降低至y[kph]。4.其他实施例
[0056]
作为每个阈值的设定,在第一阈值变更处理中,可以如在第三实施例中的那样每个阈值在预定的阈值渐变时段中逐渐增加,而在第二阈值变更处理中,可以如在第一实施例中的那样每个阈值以阶跃函数的方式降低。
[0057]
此外,在上述实施例中,将长下坡道路例示为选择第二控制模式的情况。然而,可以在其他情况下选择第二控制模式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1