车辆循迹控制方法、装置及车辆与流程
本公开涉及车辆,具体地,涉及一种车辆循迹控制方法、装置及车辆。
背景技术:
1、无人驾驶车辆在行车过程中,通常通过预瞄跟随理论来进行控制车辆进行循迹。对于无人驾驶车辆而言,存在两条路线:给定的行车轨迹和通过该预瞄点规划出来的局部运动轨迹。由于给定的行车轨迹表征的是车辆的实际行驶目标,因此需要通过适当的控制策略,使局部实际轨迹不断向给定轨迹逼近,以实现对车辆的控制。局部运行轨迹通常会结合车辆模型,如单车模型,采用三次或五次拟合曲线实现偏离位置到给定轨迹的运动过渡;或者使用纯追踪方式(pp算法)完成横向调整动作。
2、在实际的无人驾驶横向控制与性能标定中发现,目前的拟合曲线策略或pp纯追踪方式在实际场景(如快速精准停靠)中存在一定的限制。拟合曲线策略需要进行三次或五次拟合曲线,从而需要不断的计算道路或车道线的曲率,在遇到车道线异常跳变或干扰时,容易产生异常曲线路径规划而偏离;另外,为了保证连续的车辆循迹姿态调整且保持平顺性,需要生成缓变的实时规划曲线路径,导致额外的规划计算和车辆调整动作,影响到响应连续性,尤其在低速条件下更为明显。pp纯追踪方式在转弯半径较小的场景下,容易出现横向调整频繁的现象,且在车辆长度较大时存在一定转变半径大小限制,对于精准停靠有较明显的影响。
技术实现思路
1、本公开的目的是提供一种车辆循迹控制方法、装置及车辆,通过简短直接的控制偏移量对车辆横向进行快速的动态调整,避免了多个参数的复杂运算和间接过渡导致的额外调整,具有参数少、弯道适应性强、可快速精准停靠的特点,不会再由于曲率半径的影响而降低车辆控制准确性,从而方便地实现了平稳与连续的循迹跟踪并快速精准停靠。
2、为了实现上述目的,本公开提供一种车辆循迹控制方法,所述方法包括:
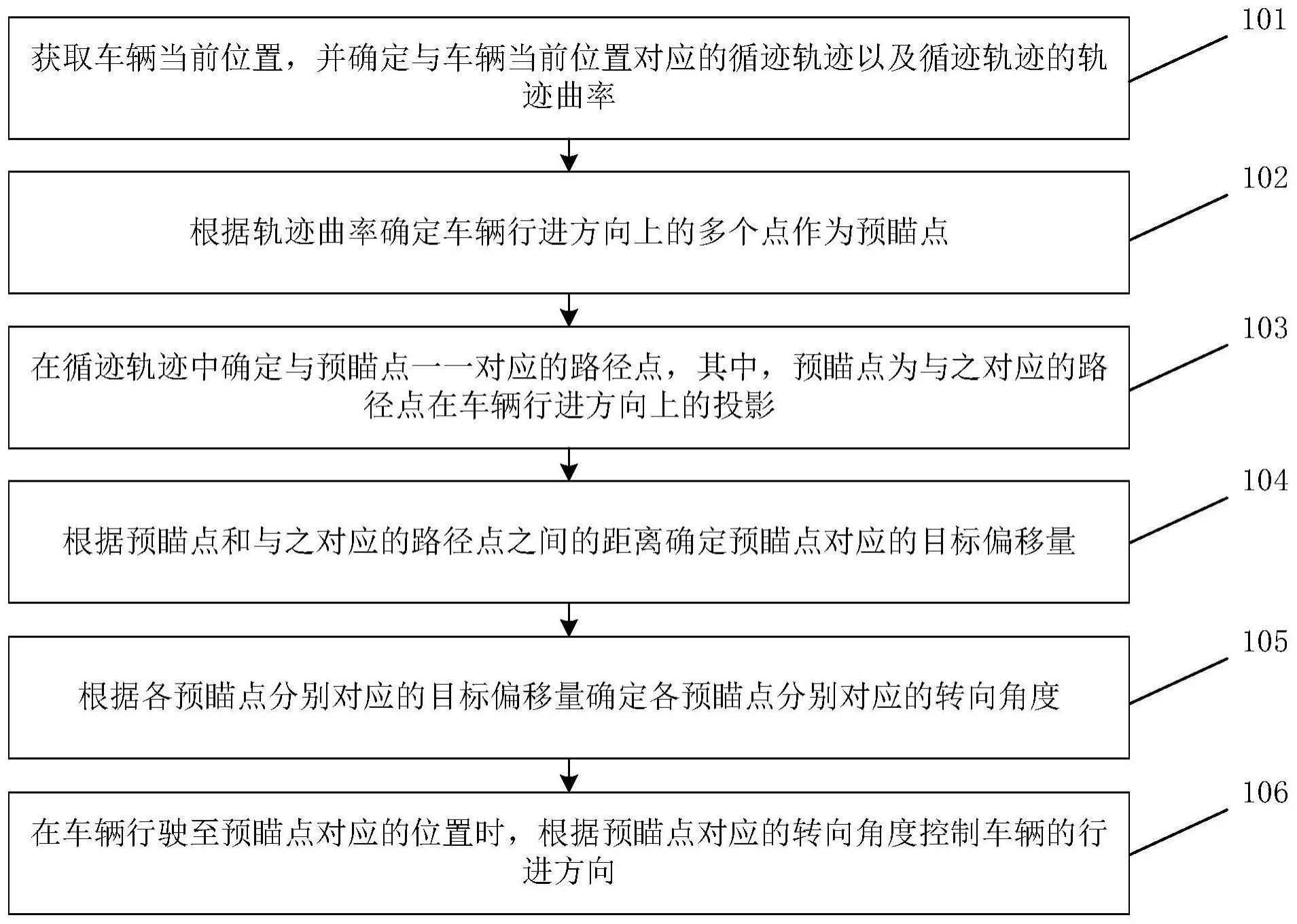
3、获取车辆当前位置,并确定与所述车辆当前位置对应的循迹轨迹以及所述循迹轨迹的轨迹曲率;
4、根据所述轨迹曲率确定车辆行进方向上的多个点作为预瞄点;
5、在循迹轨迹中确定与所述预瞄点一一对应的路径点,其中,所述预瞄点为与之对应的所述路径点在所述车辆行进方向上的投影;
6、根据所述预瞄点和与之对应的所述路径点之间的距离确定所述预瞄点对应的目标偏移量;
7、根据各预瞄点分别对应的所述目标偏移量确定各预瞄点分别对应的转向角度;
8、在车辆行驶至所述预瞄点对应的位置时,根据所述预瞄点对应的转向角度控制车辆的行进方向。
9、可选地,所述根据所述预瞄点和与之对应的所述路径点之间的距离确定所述预瞄点对应的目标偏移量包括:
10、将所述预瞄点与所述路径点之间的距离确定为实际偏移量;
11、若所述实际偏移量的绝对值小于最低偏移量阈值,则确定所述预瞄点对应的目标偏移量为零。
12、可选地,所述根据所述预瞄点和与之对应的所述路径点之间的距离确定所述预瞄点对应的目标偏移量还包括:
13、若所述实际偏移量的绝对值大于最高偏移量阈值,则将所述最高偏移量阈值确定为所述预瞄点对应的目标偏移量的绝对值,且所述目标偏移量与所述实际偏移量同号。
14、可选地,所述根据各预瞄点分别对应的所述目标偏移量确定各预瞄点分别对应的转向角度包括:
15、根据所述轨迹曲率、车辆当前车速和各预瞄点分别对应的所述目标偏移量确定各预瞄点分别对应的转向角度。
16、可选地,所述在车辆行驶至所述预瞄点对应的位置时,根据所述预瞄点对应的转向角度控制车辆的行进方向包括:
17、在车辆行驶至所述预瞄点对应的位置时,确定车辆方向盘的当前转角位置;
18、根据所述预瞄点对应的转向角度和所述当前转角位置确定车辆方向盘响应所述转向角度后的理论转角位置;
19、若所述理论转角位置位于预设不敏感转角区,将所述预瞄点对应的转向角度与预设转角裕量之和作为目标转向角度,其中,所述预设转角裕量与所述预瞄点对应的转向角度同号;
20、根据所述目标转向角度控制车辆的行进方向。
21、可选地,所述在车辆行驶至所述预瞄点对应的位置时,根据所述预瞄点对应的转向角度控制车辆的行进方向还包括:
22、若所述车辆方向盘的实际转角位置位于所述预设不敏感转角区,控制所述车辆方向盘的转角为零。
23、可选地,所述确定与所述车辆当前位置对应的循迹轨迹以及所述循迹轨迹的轨迹曲率包括:
24、在预定轨迹中查找所述车辆当前位置前方的下一个轨迹点;
25、若所述车辆当前位置不为轨迹点,在所述车辆当前位置的前一个轨迹点和所述下一个轨迹点之间进行插值,得到所述车辆当前位置前方预设距离的循迹轨迹以及所述循迹轨迹的轨迹曲率;
26、将所述车辆当前位置前方预设距离的循迹轨迹以及所述循迹轨迹的轨迹曲率作为所述车辆当前位置对应的循迹轨迹以及所述循迹轨迹的轨迹曲率。
27、可选地,所述轨迹曲率越大,所述预瞄点数量越多,各预瞄点之间的间距越小。
28、本公开还提供一种车辆循迹控制装置,所述装置包括:
29、第一处理模块,用于获取车辆当前位置,并确定与所述车辆当前位置对应的循迹轨迹以及所述循迹轨迹的轨迹曲率;
30、第二处理模块,用于根据所述轨迹曲率确定车辆行进方向上的多个点作为预瞄点;
31、第三处理模块,用于在循迹轨迹中确定与所述预瞄点一一对应的路径点,其中,所述预瞄点为与之对应的所述路径点在所述车辆行进方向上的投影;
32、第四处理模块,用于根据所述预瞄点和与之对应的所述路径点之间的距离确定所述预瞄点对应的目标偏移量;
33、第五处理模块,用于根据各预瞄点分别对应的所述目标偏移量确定各预瞄点分别对应的转向角度;
34、控制模块,用于在车辆行驶至所述预瞄点对应的位置时,根据所述预瞄点对应的转向角度控制车辆的行进方向。
35、本公开还提供一种车辆,其特征在于,包括以上所述的车辆循迹控制装置。
36、通过上述技术方案,结合车辆的实时位置和实时行进方向等实时位姿,通过简短直接的控制偏移量对车辆横向进行快速的动态调整,避免了多个参数的复杂运算和间接过渡导致的额外调整,具有参数少、弯道适应性强、可快速精准停靠的特点,不会再由于曲率半径的影响而降低车辆控制准确性,从而方便地实现了平稳与连续的循迹跟踪并快速精准停靠。
37、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种车辆循迹控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述预瞄点和与之对应的所述路径点之间的距离确定所述预瞄点对应的目标偏移量包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述预瞄点和与之对应的所述路径点之间的距离确定所述预瞄点对应的目标偏移量还包括:
4.根据权利要求1所述的方法,其特征在于,所述根据各预瞄点分别对应的所述目标偏移量确定各预瞄点分别对应的转向角度包括:
5.根据权利要求1-4中任一权利要求所述的方法,其特征在于,所述在车辆行驶至所述预瞄点对应的位置时,根据所述预瞄点对应的转向角度控制车辆的行进方向包括:
6.根据权利要求5所述的方法,其特征在于,所述在车辆行驶至所述预瞄点对应的位置时,根据所述预瞄点对应的转向角度控制车辆的行进方向还包括:
7.根据权利要求1所述的方法,其特征在于,所述确定与所述车辆当前位置对应的循迹轨迹以及所述循迹轨迹的轨迹曲率包括:
8.根据权利要求1所述的方法,其特征在于,所述轨迹曲率越大,所述预瞄点数量越多,各预瞄点之间的间距越小。
9.一种车辆循迹控制装置,其特征在于,所述装置包括:
10.一种车辆,其特征在于,包括权利要求9所述的车辆循迹控制装置。
技术总结
本公开涉及一种车辆循迹控制方法、装置及车辆,包括:获取车辆当前位置,并确定与车辆当前位置对应的循迹轨迹以及循迹轨迹的轨迹曲率;根据轨迹曲率确定车辆行进方向上的多个点作为预瞄点;在循迹轨迹中确定与预瞄点一一对应的路径点;根据预瞄点和与之对应的路径点之间的距离确定预瞄点对应的目标偏移量;根据各预瞄点分别对应的目标偏移量确定各预瞄点分别对应的转向角度;在车辆行驶至预瞄点对应的位置时,根据预瞄点对应的转向角度控制车辆的行进方向。这样,能够简单地通过预瞄点和路径点之间的偏移量对车辆横向进行快速的动态调整,减少了控制和过程参数,不受曲率半径大小的影响,保证了快速且准确地车辆循迹控制。
技术研发人员:师小五,金大鹏,田俊涛,刘莲芳
受保护的技术使用者:北汽福田汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!