踏板踏错事故防止装置的制作方法
1.本公开涉及车辆的踏板踏错事故防止装置。
背景技术:
2.驾驶车辆的驾驶员通过分开踩下彼此相邻配置的制动踏板及油门踏板(
アクセルペダル
),调节车辆的加减速。通常,驾驶员一边将一只脚(通常为右脚)在制动踏板及油门踏板上置换,一边进行制动操作或油门操作。
3.在此,在要使车辆减速的场面中,有时因驾驶员踏错制动踏板和油门踏板而导致车辆突然加速,发生车辆向前方或后方碰撞的事故。已经提出有各种用于防止这种由踏错操作踏板引起的事故的装置。
4.例如,专利文献1提出有一种行驶控制装置,该行驶控制装置中,如果车速为规定车速以下,油门打开计数器(
アクセル
on
カウンタ
)为规定期间以下,座椅靠背按压力为第一规定载荷以上,转向轴按压力为第二规定载荷以上,油门开度为规定开度以上,则假设驾驶员踏错了制动踏板和油门踏板,向发动机ecu或者制动器ecu输出发动机转矩抑制指示或者制动动作指示,以使车辆减速。
5.另外,专利文献2及3提出有一种以如下方式构成的踏错防止装置,即,不是用一只脚来操作油门踏板及制动踏板,而是用脚进行制动操作,且用手进行油门操作。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2013-233893号公报
9.专利文献2:日本特开2014-048742号公报
10.专利文献3:国际公开2015/020152号
技术实现要素:
11.发明所要解决的问题
12.但是,专利文献1公开的行驶控制装置在驾驶员踏错了制动踏板和油门踏板,且超过通常行驶时施加于靠背的载荷的载荷施加在靠背上的情况下,输出发动机转矩抑制指示或者制动动作指示。因此,发动机转矩抑制指示或者制动动作指示的输出是在产生了车辆的急加速之后,有可能来不及防患于未然。
13.另外,专利文献2及3公开的踏错防止装置不具备如下装置,即,该装置在非常时驾驶员处于恐慌状态且在操作了油门的状态下手被卡住的情况下,用于恢复油门操作。因此,在误操作了油门的情况下,有可能无法抑制或防止事故。另外,专利文献2及3公开的踏错防止装置在油门操作方面与以往不同,存在需要习惯驾驶操作之类的问题。
14.本公开是鉴于上述问题而完成的,其目的在于,提供一种踏板踏错防止装置,其可抑制发生制动踏板和油门踏板的踏错引起的事故。
15.用于解决问题的技术方案
16.为了解决上述课题,根据本公开的某种观点,提供一种踏板踏错事故防止装置,其具备:方向盘位置可变机构,其使方向盘在车辆前后方向上位移;方向盘位置调节部,其根据油门踏板的操作量使方向盘位移,使得由驾驶员操作的油门踏板的操作量越大,方向盘越位于车辆后方侧;油门踏板位置调节部,其在方向盘向车辆后方侧位移的状态下,在方向盘被向前方推回时,使油门踏板向油门踏板的操作量归零的方向位移。
17.发明效果
18.如上所说明,根据本公开,能够抑制发生由制动踏板和油门踏板的踏错引起的事故。
附图说明
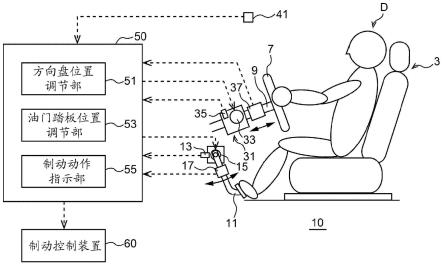
19.图1是表示本公开第一实施方式的踏板踏错事故防止装置的结构例的示意图。
20.图2是表示方向盘的移动范围的例子的说明图。
21.图3是表示随着油门踏板的操作量增加而方向盘向车辆后方侧位移的情形的说明图。
22.图4是表示对油门踏板的操作量和方向盘的位移量的关系进行设定的映射图(
マップ
)的说明图。
23.图5是表示油门踏板随着方向盘向车辆前方侧位移而位移的情形的说明图。
24.图6是表示同实施方式的踏板踏错事故防止装置的动作例的流程图。
25.图7是表示同实施方式的踏板踏错事故防止装置的作用的说明图。
26.图8是表示本公开第二实施方式的踏板踏错事故防止装置的第一传递机构的结构例的示意图。
27.图9是表示本公开第二实施方式的踏板踏错事故防止装置的第二传递机构的结构例的示意图。
具体实施方式
28.下面,参照附图对本公开的优选实施方式进行详细说明。此外,在本说明书及附图中,关于实质上具有相同功能结构的结构元件,通过标注相同的符号,省略重复说明。
29.<<1.第一实施方式>>
30.首先,对本公开第一实施方式的踏板踏错事故防止装置进行说明。
31.<1-1.概要>
32.本实施方式的踏板踏错事故防止装置是抑制由如下原因导致的事故或者缓和事故冲击的装置,该原因是在车辆的驾驶中,驾驶员陷入恐慌状态,尽管是应该踏下制动踏板的场景,却踏下了油门踏板,而车辆加速引起的。踏板踏错事故防止装置是作为如下装置而构建的,该装置主要利用在航空领域等中公知的也被称为“亚g感(
サブgセンセーション
)”的、人的行动原理,抑制由踏板踏错引起的事故。具体而言,已知人在陷入了恐慌状态时,会采取将头向后仰,且向前伸出手臂的行动。踏板踏错事故防止装置通过利用该向前伸出手臂的行动,对油门踏板的踏下施加反作用力,从而防止油门踏板的踏下。第一实施方式的踏板踏错事故防止装置使用传感器及电气控制设备而构成。
33.<1-2.结构例>
34.图1是表示本实施方式的踏板踏错事故防止装置10的结构例的示意图,示出就座于驾驶座3上的驾驶员d正在操作车辆驾驶的状态。
35.本实施方式的踏板踏错事故防止装置10作为设置于方向盘7的设备,具备使方向盘7在车辆前后方向位移的方向盘位置可变机构31、检测方向盘7的位置st_str的方向盘位置检测部35、及检测驾驶员d推动方向盘7的力f_str的力传感器37。
36.方向盘位置可变机构31由控制装置50驱动,强制地使方向盘7的位置st_str向车辆前后方向变化。在本实施方式中,方向盘位置可变机构31包含电动马达33和齿条齿轮机构而构成,该电动马达33由控制装置50控制驱动,该齿条齿轮机构包含设置于电动马达33的输出轴的小齿轮及固定于转向轴9的齿条。电动马达33使用根据供给电流的方向而可正转及反转的电动马达33。通过旋转驱动电动马达33,转向轴9沿轴向进退移动,改变方向盘7的位置st_str。但是,电动调节方向盘7的位置的方向盘位置可变机构31的结构不限定于该例。
37.图2是表示方向盘7的移动范围的例子的说明图。以不会因方向盘7的位置发生变化而给驾驶员d带来不适感,另外不会使安全性降低的方式适当地设定方向盘7可位移的范围。例如,方向盘位置可变机构31构成为相对于关闭了踏板踏错事故防止装置10的状态下的方向盘7的基准位置(正负0的位置),可分别向车辆前后方向各位移10mm。在图2中,将车辆前方设为正方向来表示移动范围。方向盘7的移动范围不限定于正负10mm。
38.此外,在停止了向电动马达33供给电流的状态下,在驾驶员d向车辆前方侧推动或向车辆后方侧拉动方向盘7的力大于电动马达33的旋转阻力的情况下,方向盘7的位置st_str会发生变化。
39.方向盘位置检测部35检测方向盘7的车辆前后方向的位置st_str。方向盘位置检测部35例如可设为设置于电动马达33并检测电动马达33的旋转角度的电位计、或检测转向轴9或齿条的位移量的磁式位移传感器。力传感器37检测驾驶员d推动方向盘7的力f_str。力传感器37例如可设为应变仪或电致应变式传感器(電歪式
センサ
)。方向盘位置检测部35及力传感器37的传感器信号发送到控制装置50。
40.另外,踏板踏错事故防止装置10作为设置于油门踏板11的设备,具备调节油门踏板11的操作量(踏下量)θa的致动器15、检测油门踏板11的操作量θa的油门踏板位置检测部13、及检测驾驶员d对油门踏板11的踏力f_acc的踏力传感器17。
41.致动器15由控制装置50驱动,至少强制地使油门踏板11向使油门踏板11的操作量θa归零的方向移动。致动器15例如可设为同轴地或者经由齿轮与油门踏板11的旋转轴连接的电动马达。但是,可电动调节油门踏板11的操作量θa的结构不限定于该例。
42.油门踏板位置检测部13检测油门踏板11的操作量θa。油门踏板位置检测部13例如可设为被设置于致动器15并检测电动马达的旋转角度的电位计、或检测油门踏板11的旋转轴的旋转角度的旋转传感器。踏力传感器17检测驾驶员d对油门踏板11的踏力f_acc。踏力传感器17例如可设为应变仪或电致应变式传感器。油门踏板位置检测部13及踏力传感器17的传感器信号发送到控制装置50。
43.控制装置50具备一个或多个例如cpu(central processing unit,中央处理单元)或dsp(digital signal processor,数字信号处理器)等的处理器而构成。另外,控制装置50具备一个或多个可与处理器进行通信的ram(random access memory,随机存取存储器)
或rom(read only memory,只读存储器)等存储器。存储器存储由处理器执行的软件程序、用于运算处理的种种参数、所获取的数据、运算结果等。处理器通过执行存储器中存储的程序,执行规定的运算处理,控制方向盘位置可变机构31及油门踏板11的操作量。
44.控制装置50具备方向盘位置调节部51、油门踏板位置调节部53及制动动作指示部55。这些各部的一部分或全部也可以分别是通过由执行规定运算处理的处理器执行程序而实现的一个功能。控制装置50构成为可获取从系统动作开关41、油门踏板位置检测部13、踏力传感器17、方向盘位置检测部35及力传感器37输出的信号。系统动作开关41由驾驶员d等操作,切换踏板踏错事故防止装置10的动作的通断。
45.(方向盘位置调节部)
46.方向盘位置调节部51根据油门踏板11的操作量θa使方向盘7位移(参照图3),使得由驾驶员d操作的油门踏板11的操作量θa越大,越使方向盘7位于车辆后方侧。在本实施方式中,方向盘位置调节部51基于由油门踏板位置检测部13检知的油门踏板11的操作量θa,控制方向盘位置可变机构31的电动马达33的驱动。
47.方向盘位置调节部51在未踏下油门踏板11的状态、即油门踏板11的操作量θa为零的状态下,不向电动马达33供给电流、或供给一定的电流。由此,在未踏下油门踏板11的状态下,方向盘7被保持在基准位置(图2的正负0的位置)st_str_0。另外,油门踏板11的操作量θa越大,方向盘位置调节部51越使方向盘7向车辆后方侧位移(图2的负方向)。由此,通过在驾驶员d踏下了油门踏板11的状态下使手臂向前伸出的行动,形成方向盘7可回到基准位置st_str_0的状况。
48.此外,方向盘位置调节部51也可以具备以使方向盘7在踏板踏错事故防止装置10的动作被断开的状态下不向车辆前后方向位移的方式进行控制的功能。例如,方向盘位置调节部51也可以通过在系统动作开关41被断开的期间向电动马达33供给一定的电流,由此将方向盘7保持在基准位置st_str_0。但是,在踏板踏错事故防止装置10的动作被断开的状态下将方向盘7保持在基准位置st_str_0的装置不限于上述例子。例如,控制装置50也可以使锁定机构进行动作,该锁定机构使挡块与方向盘位置可变机构31的齿条齿轮机构卡止等,禁止系统动作开关41被断开的期间的方向盘位置可变机构31的动作。
49.图4是表示对油门踏板11的操作量θa和方向盘7的位移量的关系进行了设定的映射图之一例的说明图。油门踏板11的操作量θa越大,方向盘位置调节部51越使方向盘7向车辆后方侧位移。图4所示的例子是在油门踏板11的旋转动作和进气节气门(吸気
スロットル
)的开闭动作之间设有机械或控制的死区(不感帯)时的例子。在图4所示的例子中,从开始踏下油门踏板11到规定的操作量θa_a为止,随着油门踏板11的操作量θa的增大,方向盘7的位置st_str逐渐向车辆后方侧变化。另外,在油门踏板11的操作量θa超过了规定的操作量θa_a之后,在达到最大操作量θa_max的期间,方向盘7的位移相对于油门踏板11的操作量θa_a的位移之比与油门踏板11的操作量θa为规定的操作量θa_a以下的情况相比,相对较大。
50.但是,方向盘7的位移量相对于油门踏板11的操作量θa的关系不限于图4所示的例子。例如,根据伴随油门踏板11的旋转动作的进气节气门的开闭动作的设定状态、油门踏板11的复位弹簧的反作用力、方向盘位置可变机构31的静摩擦等车辆特性,适当地设定使方向盘7的位置st_str开始变化的油门踏板11的操作量θa、方向盘7向车辆后方侧的位移量成为最大的油门踏板11的操作量θa、相对于油门踏板11的操作量θa的变化而言的方向盘7的
位移量(位移速度或滞后)。由此,能够防止因驾驶员d对油门踏板11的操作量θa的急增、或者驾驶员d无意导致的油门踏板11的操作量θa的急增而使方向盘7振动。另外,就脚对油门踏板11的操作感而言,因为踏板反作用力的比重较大,所以通过适当设定方向盘7的位移量相对于油门踏板11的操作量θa的关系,能够使与脚受到的反作用力同等的反作用力作用于驾驶员的手,能够使脚和手各自的操作感觉接近。
51.另外,方向盘位置调节部51在油门踏板位置调节部53驱动致动器15而调节油门踏板11的操作量θa的期间,停止进行方向盘位置可变机构31的电动马达33的驱动、或者减小电动马达33的驱动转矩。在本实施方式的例子中,在由力传感器37检测到的驾驶员d推动方向盘7的力f_str大于预设定的阈值f_str_0的情况下,方向盘位置调节部51停止电动马达33的驱动。由此,在察觉到碰撞危险的情况下等,不会阻碍通过驾驶员d向前伸出手臂的行动而使方向盘7回到车辆前方侧的动作,能够高效地执行由油门踏板位置调节部53使油门踏板11的操作量θa归零的动作。
52.另外,方向盘位置调节部51也可以基于由踏力传感器17检测到的油门踏板11的踏力f_acc,控制方向盘位置可变机构31的电动马达33的驱动。例如,在驾驶员d踏下了油门踏板11的状态下,油门踏板11的踏力f_acc成为与油门踏板11的复位弹簧的反作用力对应的值。因此,方向盘位置调节部51在油门踏板11的踏力f_acc超过了预设定的阈值f_acc_0的情况下,根据油门踏板11的操作量θa改变方向盘7的位置st_str。考虑到驾驶员d踏下油门踏板11时所需要的力,阈值f_acc_0预先设定为0以上的适当值。由此,能够应对在例如非紧急时的通常行驶时不喜欢方向盘7位移的驾驶员d的使用请求。另一方面,在紧急时,在误踏下了油门踏板11的情况下,产生使方向盘7向后方位移的力,能够使驾驶员d的手感受到驾驶员d的脚的动作。
53.另外,方向盘位置调节部51在油门踏板11的踏力f_acc的变化速度|δf_acc/dt|超过了预设定的阈值δf_acc/dt_a的情况下,也可以根据油门踏板11的操作量θa限制使方向盘7的位置st_str变化的速度。阈值δf_acc/dt_a设定为适当值,作为可预先检测油门踏板11的踏力f_acc的急剧上升及急剧下降的值。由此,能够防止因驾驶员d对油门踏板11的操作量θa的急剧变化、或驾驶员d无意进行的油门踏板11的操作量θa的急剧变化而使方向盘7振动。此外,方向盘位置调节部51也可以在使方向盘7的位置st_str变化的速度上预先设置上限。
54.另外,方向盘位置调节部51也可以基于由加速度传感器代替踏力传感器17检测到的油门踏板11的踏下时的加速度,控制方向盘位置可变机构31的电动马达33的驱动。该情况下,方向盘位置调节部51也可以使用低通滤波器等对来自加速度传感器的输入信号进行滤波,不会基于超过在驾驶员d的通常驾驶操作中不会产生的规定加速度的油门踏板11的旋转动作,来改变方向盘7的位置。由此,能够防止因驾驶员d无意进行的脉冲状的输入或高频振动的输入而使方向盘7振动。
55.另外,方向盘位置调节部51在油门踏板11的操作量θa变化时的加速度超过了预设定的阈值的情况下,也可以根据油门踏板11的操作量θa来改变方向盘7的位置st_str。由此,能够应对例如在非紧急时的通常行驶时不喜欢方向盘7位移的驾驶员d的使用请求。另一方面,在紧急时,在误踏下了油门踏板11的情况下,产生使方向盘7向后方位移的力,能够使驾驶员d的手感受到驾驶员d的脚的动作。
56.(油门踏板位置调节部)
57.油门踏板位置调节部53在方向盘7向车辆后方侧位移的状态下,在方向盘7被向前方推回时,使油门踏板11向油门踏板11的操作量θa归零的方向位移(参照图5)。在本实施方式中,油门踏板位置调节部53基于由方向盘位置检测部35检知的方向盘7的位置st_str,控制调节油门踏板11的操作量θa的致动器15的驱动。由此,随着驾驶员d向前伸出手臂的行动,能够使油门踏板11的操作量θa归零。
58.另外,油门踏板位置调节部53在由力传感器37检测的驾驶员d推动方向盘7的力f_str大于预设定的阈值f_str_0的情况下,也可以基于方向盘7的位置st_str,控制致动器15的驱动,调节油门踏板11的操作量θa。阈值f_str_0可预先设定为0以上的任意值。例如,阈值f_str_0设定为适当值,以使驾驶员d在通常的驾驶操作中推动方向盘7的力不超过阈值f_str_0。由此,能够应对在例如非紧急时的通常行驶时对于方向盘7的位移和油门踏板11的位移的连动不喜欢的驾驶员d的使用请求。另一方面,在紧急时,在驾驶员d处于恐慌状态等而向前伸出手臂时,通过方向盘7的位置st_str的变化,产生使油门踏板11返回的力,能够防止油门踏板11被错误地进一步踏下。另外,油门踏板位置调节部53也可以使用低通滤波器等对来自力传感器37的输入信号进行滤波,在推动方向盘7的力f_str超过在驾驶员d的通常驾驶操作中不会产生的规定值的情况下,不使油门踏板11的操作量θa位移。由此,能够防止因驾驶员d无意进行的脉冲状的输入或高频振动的输入而使油门踏板11振动。
59.另外,油门踏板位置调节部53也可以基于加速度传感器代替力传感器37检测到的方向盘7的位置st_str发生变化时的加速度,控制致动器15的驱动。例如,油门踏板位置调节部53在方向盘7的位置st_str发生变化时的加速度超过了预设定的阈值的情况下,也可以根据方向盘7的位置st_str,使油门踏板11的操作量θa位移。阈值可预先设定为0以上的任意值。例如,阈值设定为适当值,以使驾驶员d在通常驾驶操作中推动方向盘7的力不超过阈值。由此,能够应对在例如非紧急时的通常行驶时对于方向盘7的位移和油门踏板11的位移的连动不喜欢的驾驶员d的使用请求。另一方面,在紧急时,在驾驶员d处于恐慌状态等而向前伸出手臂时,通过方向盘7的位置st_str的变化,产生使油门踏板11返回的力,能够防止油门踏板11被错误地进一步踏下。另外,油门踏板位置调节部53也可以使用低通滤波器等对来自加速度传感器的输入信号进行滤波,不会基于超过在驾驶员d的通常驾驶操作中不会产生的规定加速度的方向盘7的位置st_str的变化,而使油门踏板11的操作量θa位移。由此,能够防止因驾驶员d无意进行的脉冲状的输入或高频振动的输入而使油门踏板11振动。
60.例如,油门踏板位置调节部53也可以使用图4所示的映射图,基于方向盘7的位置st_str,调节油门踏板11的操作量θa,还可以使用不同的映射图,基于方向盘7的位置st_str,调节油门踏板11的操作量θa。
61.(制动动作指示部)
62.制动动作指示部55在由油门踏板位置调节部53使油门踏板11的操作量θa归零之后,通过将方向盘7进一步向前方推动,生成使车辆产生制动力的指示信号。油门踏板位置调节部53具有随着驾驶员d向前伸出手臂的行动而使油门踏板11的操作量θa归零,抑制车辆加速的功能,与之相对,制动动作指示部55还具有使车辆产生制动力的功能。
63.例如,在油门踏板位置调节部53基于图4所示的映射图使油门踏板11的操作量θa
归零的情况下,方向盘7位于基准位置(图2的正负0的位置)st_str_0。该情况下,制动动作指示部55在方向盘7向比基准位置st_str_0更靠车辆前方侧(图2的正侧)位移时,生成产生制动力的指示信号,向制动控制装置60发送指示信号。接收到指示信号的制动控制装置60产生制动力,使车辆减速。制动控制装置60也可以驱动液压制动装置而产生制动力,还可以对驱动车轮的电动机进行再生驱动,而产生制动力。
64.产生的制动力的目标值也可以是一定的值,但也可以在方向盘7的位置st_str变化到比基准位置st_str_0更靠车辆前方侧的情况下,方向盘7的位置st_str相对于基准位置st_str_0的变化量越大,制动动作指示部55越加大要产生的制动力的目标值。由此,能够根据从驾驶员d向前伸出手臂的行动推断的恐慌度,加大制动力。
65.此外,制动动作指示部55开始向制动控制装置60发送产生制动力的指示信号的定时不限于油门踏板11的操作量θa归零之后,也可以从油门踏板11的操作量θa归零之前就开始向制动控制装置60发送产生制动力的指示信号。换言之,制动动作指示部55也可以从方向盘7回到基准位置st_str_0之前开始向制动控制装置60发送产生制动力的指示信号。
66.<1-3.动作>
67.接着,对本实施方式的踏板踏错事故防止装置10的动作进行说明。
68.图6是表示踏板踏错事故防止装置10的控制装置50的动作的流程图。以下说明的流程图也可以在车辆的系统启动的期间始终执行,但在本实施方式中,在系统动作开关41接通的状态下执行。
69.首先,方向盘位置调节部51基于踏力传感器17的传感器信号,判定所检测的油门踏板11的踏力f_acc是否超过了预设定的阈值f_acc_0(步骤s11)。阈值f_acc_0是考虑到驾驶员d踏下油门踏板11时所需要的力而预设定的0以上的任意值。在所检测的踏力f_acc为阈值f_acc_0以下的情况下(s11/否),方向盘位置调节部51重复进行步骤s11的判定。
70.另一方面,在所检测的踏力f_acc超过了阈值f_acc_0的情况下(s11/是),方向盘位置调节部51判定油门踏板11的踏力f_acc的变化速度|δf_acc/dt|是否超过了预设定的阈值δf_acc/dt_a(步骤s13)。阈值δf_acc/dt_a预设定为可检测油门踏板11的踏力f_acc的急剧变化的值。在油门踏板11的踏力f_acc的变化速度|δf_acc/dt|没有超过阈值δf_acc/dt_a的情况下(s13/否),直接进入步骤s17。
71.另一方面,在油门踏板11的踏力f_acc的变化速度|δf_acc/dt|超过了阈值δf_acc/dt_a的情况下(s13/是),方向盘位置调节部51限制基于方向盘位置可变机构31的方向盘7的位置变化速度(步骤s15)。即,在油门踏板11的踏力f_acc发生了急剧变化的情况下等,方向盘7的位置st_str急速变化的结果是,限制方向盘7的位置变化速度,以使方向盘7不产生振动。具体而言,对方向盘位置可变机构31的电动马达33的旋转速度加以限制。
72.接下来,方向盘位置调节部51根据基于油门踏板位置检测部13的传感器信号检测到的油门踏板11的操作量θa,来控制方向盘位置可变机构31的电动马达33的驱动,使方向盘7的位置st_str向车辆后方侧变化(步骤s17)。例如,方向盘位置调节部51参照图4所示的映射图,以油门踏板11的操作量θa越大,越使方向盘7位于车辆后方侧的方式控制电动马达33的驱动。由此,在驾驶员d采取了向前伸出手臂的行动的情况下,形成可使方向盘7向前方移动的状态。
73.接下来,油门踏板位置调节部53判定基于力传感器37的传感器信号检测到的、驾
驶员d推动方向盘7的力f_str是否超过了预设定的阈值f_str_0(步骤s19)。阈值f_str_0是以驾驶员d在通常的驾驶操作中推动方向盘7的力不超过阈值f_str_0的方式预设定的0以上的任意值。在所检测的力f_str为阈值f_str_0以下的情况下(s19/否),返回到步骤s11,方向盘位置调节部51基于油门踏板11的操作量θa持续调节方向盘7的位置st_str。
74.另一方面,在所检测的力f_str超过了阈值f_str_0的情况下(s19/是),油门踏板位置调节部53使用低通滤波器,对方向盘位置检测部35的传感器信号进行滤波处理(步骤s21)。由此,能够防止因驾驶员d无意对方向盘7的位置st_str的摇摆而使油门踏板11振动。接下来,油门踏板位置调节部53基于根据滤波处理后的信号而检测到的方向盘7的位置st_str来驱动对油门踏板11的操作量θa进行调节的致动器15,使油门踏板11的操作量θa向零的方向返回(步骤s23)。例如油门踏板位置调节部53参照图4所示的映射图,基于方向盘7的位置st_str,调节油门踏板11的操作量θa。由此,在异常时,在驾驶员d处于恐慌状态等而采取了向前伸出手臂的行动时,能够防止油门踏板11被踏下。另外,能够使驾驶员d的手感受到驾驶员d对于踏下油门踏板11的反作用力,能够使驾驶员d自身意识到进行了误操作。由此,也能够期待使驾驶员d从恐慌状态恢复过来。
75.接下来,制动动作指示部55判定方向盘7的位置st_str是否处于基准位置st_str_0更前方(步骤s25)。在方向盘7的位置st_str不处于基准位置st_str_0更前方的情况下(s25/否),返回到步骤s19,油门踏板位置调节部53进行驾驶员d推动方向盘7的力f_str是否超过了预设定的阈值f_str_0的判定。
76.另一方面,在方向盘7的位置st_str处于基准位置st_str_0更前方的情况下(步骤s25/是),制动动作指示部55生成产生车辆制动力的指示信号,且向制动控制装置60发送指示信号(步骤s27)。例如,处于基准位置st_str_0更前方的方向盘7的位置st_str和基准位置st_str_0之差越大,制动动作指示部55越将所产生的制动力的目标值设定得较大,并发送指示信号。由此,制动控制装置60产生车辆的制动力,车辆进行减速。
77.<1-4.作用>
78.接着,对本实施方式的踏板踏错事故防止装置10的作用进行说明。
79.图7表示踏板踏错事故防止装置10的动作中的、油门踏板11的操作量θa、方向盘7的位置st_str及车速v的推移的一个例子。
80.在图7所示的例子中,在时刻t1驾驶员d开始踏下了油门踏板11之后,直到进气节气门开始打开的时刻t2为止的期间,随着油门踏板11的操作量θa的增加,方向盘7的位置st_str逐渐向车辆后方侧(负侧)变化(参照图4)。在该期间,车速v不上升。
81.在时刻t2,当进气节气门开始打开时,以后随着油门踏板11的操作量θa的增加,方向盘7的位置st_str的变化速度变快(参照图4)。另外,随着油门踏板11的操作量θa的增加,车速v上升。
82.其后,在时刻t3,当驾驶员d停止踏下油门踏板11,油门踏板11的操作量θa保持在一定的值时,车速v也保持在一定的值。
83.在时刻t4,假设发生了其他车辆或步行者突然出现在车辆前方等紧急事态,驾驶员d处于恐慌状态,采取了向前伸出手臂的行动。于是,方向盘7被推向前方,方向盘7的位置st_str开始向前方侧变化。随之,产生对于驾驶员d踏下油门踏板11的反作用力,并且油门踏板11向油门踏板11的操作量θa归零的方向位移,车速v开始降低。这时,即使在驾驶员d处
于恐慌状态而进行了误将油门踏板11当作制动踏板踏下的动作的情况下,因为通过将手臂伸出的行动使油门踏板11返回,所以也能够防止车辆的加速。另外,能够使驾驶员d感受到对于驾驶员d踏下油门踏板11的反作用力,能够使驾驶员d自身意识到进行了误操作。由此,也能够期待使驾驶员d从恐慌状态恢复过来。
84.接下来,在时刻t5,方向盘7的位置st_str回到基准位置st_str_0,并且油门踏板11的操作量θa随之成为零。在本实施方式中,在时刻t5以后,在方向盘7被推到基准位置st_str_0更前方的情况下,使车辆产生制动力,在时刻t6,使车辆停止。
85.<1-5.效果>
86.如上所说明,本实施方式的踏板踏错事故防止装置10形成如下状态,即,在踏下了油门踏板11的情况下,使方向盘7的位置st_str向车辆后方侧变化,在驾驶员d采取了向前伸出手臂的行动的情况下,可使方向盘7向前方移动。另外,踏板踏错事故防止装置10在异常时驾驶员d处于恐慌状态等而采取了向前伸出手臂的行动时,随着方向盘7被推向前方,使油门踏板11向油门踏板11的操作量θa归零的方向位移。因此,在异常时,产生对于驾驶员d踏下油门踏板11的动作的反作用力,能够防止驾驶员d进一步踏下油门踏板11。另外,能够使驾驶员d感受到对于驾驶员d踏下油门踏板11的反作用力,能够使驾驶员d自身意识到进行了误操作。由此,也能够期待使驾驶员d从恐慌状态恢复过来。进而,因为随着方向盘7被推向前方,油门踏板11向油门踏板11的操作量θa归零的方向位移,所以能够使车辆减速。这样,本实施方式的踏板踏错事故防止装置10利用驾驶员d在恐慌状态下采取的行动,能够抑制由踏错油门踏板11引起的事故、或者能够缓和由事故引起的冲击。
87.另外,本实施方式的踏板踏错事故防止装置10在方向盘7被进一步推到基准位置st_str_0更前方的情况下,向制动控制装置60发送产生制动力的指示信号。因此,能够使车辆积极地减速,抑制由踏错油门踏板11引起的事故、或者能够提高缓和由事故引起的冲击的效果。
88.另外,在本实施方式的踏板踏错事故防止装置10中,方向盘位置调节部51在驾驶员d将方向盘7推向前方的力f_str超过了规定的阈值f_str_0的情况下,基于油门踏板11的操作量θa,停止使方向盘7的位置st_str发生变化的动作、或者减小电动马达33的驱动转矩。由此,在驾驶员d采取了向前伸出手臂的行动的情况下,不会阻碍方向盘7回到车辆前方侧的动作,能够由油门踏板位置调节部53高效地执行油门踏板11的操作量θa归零的动作。
89.<1-6.应用例>
90.接着,对上述实施方式的踏板踏错事故防止装置10的应用例进行说明。
91.上述实施方式的踏板踏错事故防止装置10是作为使油门踏板11的操作量θa和方向盘7的位置st_str连动的装置而构建的,但也可以进一步使方向盘7的位置st_str和制动踏板的操作量θb连动。
92.应用例的踏板踏错事故防止装置还具备使制动踏板位移的致动器、和控制使制动踏板位移的致动器的驱动的制动踏板位置调节部。另一方面,应用例的踏板踏错事故防止装置可省略控制装置50的功能结构中的制动动作指示部55。使制动踏板位移的致动器与使油门踏板11位移的致动器15同样,可以是电动马达等。另外,制动踏板位置调节部被设置为控制装置50的功能。
93.制动踏板位置调节部在由方向盘位置调节部51使方向盘7向车辆后方侧位移的状
态下,在方向盘7被向前方推回时,驱动致动器,使制动踏板向制动踏板的操作量θb增加的方向位移。该情况下,不需要上述实施方式的控制装置50的制动动作指示部55,制动系统能够基于制动踏板的操作量θb而动作,产生制动力。在应用例中,在方向盘7向车辆前方侧返回时,可适当设定使制动踏板的操作量θb开始增加的方向盘7的位置st_str。
94.应用例的踏板踏错事故防止装置在油门踏板11被踏下而方向盘7向车辆后方侧位移的状态下,在驾驶员d采取了向前伸出手臂的行动时,产生对踏下油门踏板11的反作用力,抑制油门踏板11的进一步踏下,并且使油门踏板11的操作量θa归零,且使制动踏板的操作量θb增加而使车辆产生制动力。因此,通过利用驾驶员d在恐慌状态下采取的行动使制动踏板的操作量θb增加,能够抑制由油门踏板11的踏错引起的事故,或者,能够缓和由事故引起的冲击。
95.<<2.第二实施方式>>
96.接下来,对本公开的第二实施方式的踏板踏错事故防止装置进行说明。
97.第一实施方式的踏板踏错防止装置使用传感器及电控制设备而构成,与之相对,第二实施方式的踏板踏错防止装置由不使用电控制设备的机械式机构构成。
98.图8及图9是表示本实施方式的踏板踏错事故防止装置70的示意图。图8表示第一传递机构75的例子,该第一传递机构75将由油门踏板11的操作量θa的增加引起的油门踏板11的可动部的动作传递到方向盘位置可变机构73,使方向盘7向车辆后方侧移动。图9表示第二传递机构85的例子,该第二传递机构85将由方向盘7向车辆前方侧移动引起的方向盘位置可变机构73的动作传递到制动踏板12的可动部,使制动踏板12的操作量增加。
99.在踏板踏错事故防止装置70中,方向盘位置调节部及油门踏板位置调节部包含第一传递机构75及第二传递机构85而构成。第一传递机构75将由油门踏板11的操作量θa的增加引起的油门踏板11的可动部的动作传递到方向盘位置可变机构73,使方向盘7向车辆后方侧移动。另外,第一传递机构75在方向盘7向车辆后方侧位移的状态下,将方向盘7被向前方推回时的方向盘位置可变机构73的动作传递到可动部,使油门踏板11向油门踏板11的操作量θa归零的方向位移。
100.图8例示的第一传递机构75包含第一带轮71、第二带轮74、中间带轮77及线79。第一带轮71被固定为与油门踏板11的旋转轴同轴,随着油门踏板11的位移而转动。第二带轮74被固定为与齿条齿轮式方向盘位置可变机构73的未图示的小齿轮同轴。线79的两端分别卷挂于第一带轮71及第二带轮74。另外,线79的中央部卷挂于中间带轮77。
101.在踏下油门踏板11时,线79被向油门踏板11侧牵引,卷挂于第一带轮71的线79的一端沿卷绕方向卷绕于第一带轮71。在方向盘7向车辆前方侧移动时,线79被向方向盘7侧牵引,卷挂于第二带轮74的线79的另一端沿卷绕方向卷绕于第二带轮74。因此,在驾驶员d踏下油门踏板11,且油门踏板11的操作量θa增加的情况下,线79一方面卷绕于第一带轮71,另一方面从第二带轮74导出,方向盘7向车辆后方侧位移。另外,在驾驶员d采取向前伸出手臂的行动,且方向盘7向车辆前方侧位移的情况下,线79一方面卷绕于第二带轮74,另一方面从第一带轮71导出,油门踏板11向油门踏板11的操作量θa变成零的方向位移。
102.线79相对于第一带轮71的卷绕直径、及线79相对于第二带轮74的卷绕直径根据方向盘7的位移量相对于油门踏板11的操作量θa的位移量之比来设定。或者,也可以通过代替第一带轮71或除了第一带轮71以外,或者代替第二带轮74或除了第二带轮74以外而设置由
多个齿轮的组合构成的减速器或增速器,来设定方向盘7的位移量相对于油门踏板11的操作量θa的位移量之比。
103.第二传递机构85将由方向盘7向比基准位置更靠车辆前方侧移动引起的方向盘位置可变机构73的动作传递到制动踏板12的可动部,使制动踏板12的操作量增加。图9例示的第二传递机构85与第一传递机构75同样,包含第一带轮81、第二带轮84、中间带轮87及线89而构成。但是,线89相对于第一带轮81的卷绕方向与第一传递机构75的线79相对于第一带轮71的卷绕方向相反。因此,在驾驶员d将方向盘7推向车辆前方侧的情况下,线89一方面卷绕于第二带轮84,另一方面从第一带轮81导出,制动踏板12向制动踏板12的操作量增大的方向位移。
104.在第二传递机构85中,线89相对于第一带轮81的卷绕直径、及线89相对于第二带轮84的卷绕直径也根据制动踏板12的操作量的位移量相对于方向盘7的位移量之比来设定。或者,也可以通过代替第一带轮81或除了第一带轮81以外,或者代替第二带轮84或除了第二带轮84以外而设置由多个齿轮的组合构成的减速器或增速器,设定制动踏板12的操作量的位移量相对于方向盘7的位移量之比。
105.通过由机械式机构构成的踏板踏错事故防止装置70,也能够形成如下状态,即,在踏下了油门踏板11的情况下,使方向盘7的位置向车辆后方侧变化,在驾驶员d采取了向前伸出手臂的行动的情况下,可使方向盘7向前方移动。另外,踏板踏错事故防止装置70在异常时,在驾驶员d处于恐慌状态等而采取了向前伸出手臂的行动时,随着方向盘7被向前方推动,使油门踏板11向油门踏板11的操作量θa归零的方向位移。因此,在异常时,产生对驾驶员d踏下油门踏板11的动作的反作用力,能够防止驾驶员d进一步踏下油门踏板11。另外,能够使驾驶员d感受到驾驶员d对踏下油门踏板11的反作用力,能够使驾驶员d自身意识到进行了误操作。由此,也能够期待使驾驶员d从恐慌状态恢复过来。进而,因为随着方向盘7被向前方推动,油门踏板11向油门踏板11的操作量θa归零的方向位移,所以能够使车辆减速。这样,本实施方式的踏板踏错事故防止装置70利用驾驶员d在恐慌状态下采取的行动,能够抑制由油门踏板11的踏错引起的事故、或者能够缓和由事故引起的冲击。
106.另外,本实施方式的踏板踏错事故防止装置70在方向盘7被进一步推到比基准位置st_str_0更靠前方的情况下,使制动踏板12向制动踏板12的操作量增大的方向位移。因此,能够使车辆积极地减速,抑制由油门踏板11的踏错引起的事故、或者能够提高缓和由事故引起的冲击的效果。
107.此外,图8所示的踏板踏错事故防止装置70的结构例只是一个例子,可适当变形。例如,在第一带轮和第二带轮之间传递旋转的部件不限于线,也可以是皮带或链条等其他部件。另外,第一带轮、第二带轮及中间带轮也可以是齿轮。另外,中间带轮不限于一个,也可以为适当数量。进而,也可以构成为,在固定于适当位置的管内配置线的一部分,不使用中间带轮,就可相互传递油门踏板11或制动踏板12的旋转动作、和由方向盘7的车辆前后方向的位移引起的方向盘位置可变机构31的动作。
108.以上,参照附图对本公开的最佳实施方式进行了详细说明,但本公开不限定于这种例子。如果是本公开所属的技术领域中的具有通常知识的人,则在权利要求书记载的技术思想的范畴内,可想到各种变更例或修正例,这是很明了的,关于这些,也理解为当然属于本公开的技术范围。
109.例如,以下方式也属于本公开的技术范围。
110.在第一实施方式的踏板踏错事故防止装置10中,还具备制动动作指示部,该制动动作指示部生成产生车辆制动力的指示信号,制动动作指示部在由油门踏板位置调节部使油门踏板的操作量归零之后,进一步将方向盘推向前方,由此生成使车辆产生制动力的指示信号。
111.在第一实施方式的踏板踏错事故防止装置10中,还具备:致动器,其使制动踏板位移;制动踏板位置调节部,其控制使制动踏板位移的致动器的驱动,其中制动踏板位置调节部在方向盘向车辆后方侧位移的状态下,在方向盘被向前方推回时,使制动踏板向制动踏板的操作量增加的方向位移。
112.在第二实施方式的踏板踏错事故防止装置70中,方向盘位置调节部及油门踏板位置调节部包含传递机构而构成,该传递机构将由油门踏板的操作量的增加引起的油门踏板的可动部的动作传递到方向盘位置可变机构,使方向盘向车辆后方侧移动,并且在方向盘向车辆后方侧位移的状态下,将方向盘被向前方推回时的方向盘位置可变机构的动作传递到可动部,使油门踏板向油门踏板的操作量归零的方向位移。
113.符号说明
[0114]7…
方向盘
[0115]9…
转向轴
[0116]
10
…
踏板踏错事故防止装置
[0117]
11
…
油门踏板
[0118]
13
…
油门踏板位置检测部
[0119]
15
…
致动器
[0120]
17
…
踏力传感器
[0121]
31
…
方向盘位置可变机构
[0122]
33
…
电动马达
[0123]
35
…
方向盘位置检测部
[0124]
37
…
力传感器
[0125]
50
…
控制装置
[0126]
51
…
方向盘位置调节部
[0127]
53
…
油门踏板位置调节部
[0128]
55
…
制动动作指示部
[0129]
70
…
踏板踏错事故防止装置
[0130]
71
…
第一带轮
[0131]
73
…
方向盘位置可变机构
[0132]
74
…
第二带轮
[0133]
75
…
传递机构
[0134]
77
…
中间带轮
[0135]
79
…
线。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1