电驱动车辆的控制方法及控制系统与流程
本发明涉及新能源汽车领域,具体地涉及一种电驱动车辆的控制方法和一种电驱动车辆的控制系统。
背景技术:
1、随着新能源汽车的推广,电力驱动技术在汽车领域应用越来越广泛。当车辆爬坡过程中停下后重新起步时,需驾驶员松刹车后立即踩油门,否则车辆会在自身重力的作用下发生后溜。对于不熟练的驾驶员来说,往往会手忙脚乱,容易发生事故。由于电机的扭矩输出具备响应快的特性,电驱动车辆(如纯电动汽车、油电混动汽车)多通过电机堵转在车辆后溜的反方向施加能平衡车辆坡道阻力的驱动力,使车辆能够静止在坡道上。
2、电驱动车辆(如电驱动工程车)通过两个轮边电机驱动车轮实现车辆行驶,在行驶过程中,通过采集速度推杆及使能踏板指令,并将其转换为驱动电机的需求转速,该需求转速经平滑、限制等处理后得到转速控制命令,之后由电机控制器按照一定算法对电机进行控制,使驱动电机按照转速命令输出,最终实现车辆的行驶。
3、再者,目前电驱动车辆中的电驱动工程车,存在载荷大;负载变化大和工况复杂等特点,对电驱动工程车的安全性能高。现有防溜坡均采用软件控制方法,即利用转速、扭矩信号判断车辆的溜坡工况,通过控制电机输出零转速在坡道进行停留驻坡。当需要起步时,根据电机实际转速对电机命令进行pi控制、通过逐渐增加电机扭矩和扭矩变化率的方法控制车辆,使其退出溜坡状态。虽然现有技术方案都能够在一定程度上进行坡道辅助,但这些方案都受制于电机的堵转特性(电机运行在零转速时,进行转矩输出的工况),通过电机堵转保持车辆在坡道上静止的时间不能太长,否则可能会造成温升过高进而导致电机损坏,或者因电机自保护而不能输出足够的扭矩,造成车辆后溜发生安全事故。
技术实现思路
1、本发明实施方式的目的是提供一种电驱动车辆的控制方法和一种电驱动车辆的控制系统,以至少解决上述电驱动车辆在坡道中的启停性能不高的问题。
2、为了实现上述目的,本发明第一方面提供一种电驱动车辆的控制方法,所述方法包括:
3、获取车辆在爬坡模式下,且车辆处于匀速行驶状态下的驱动电流;
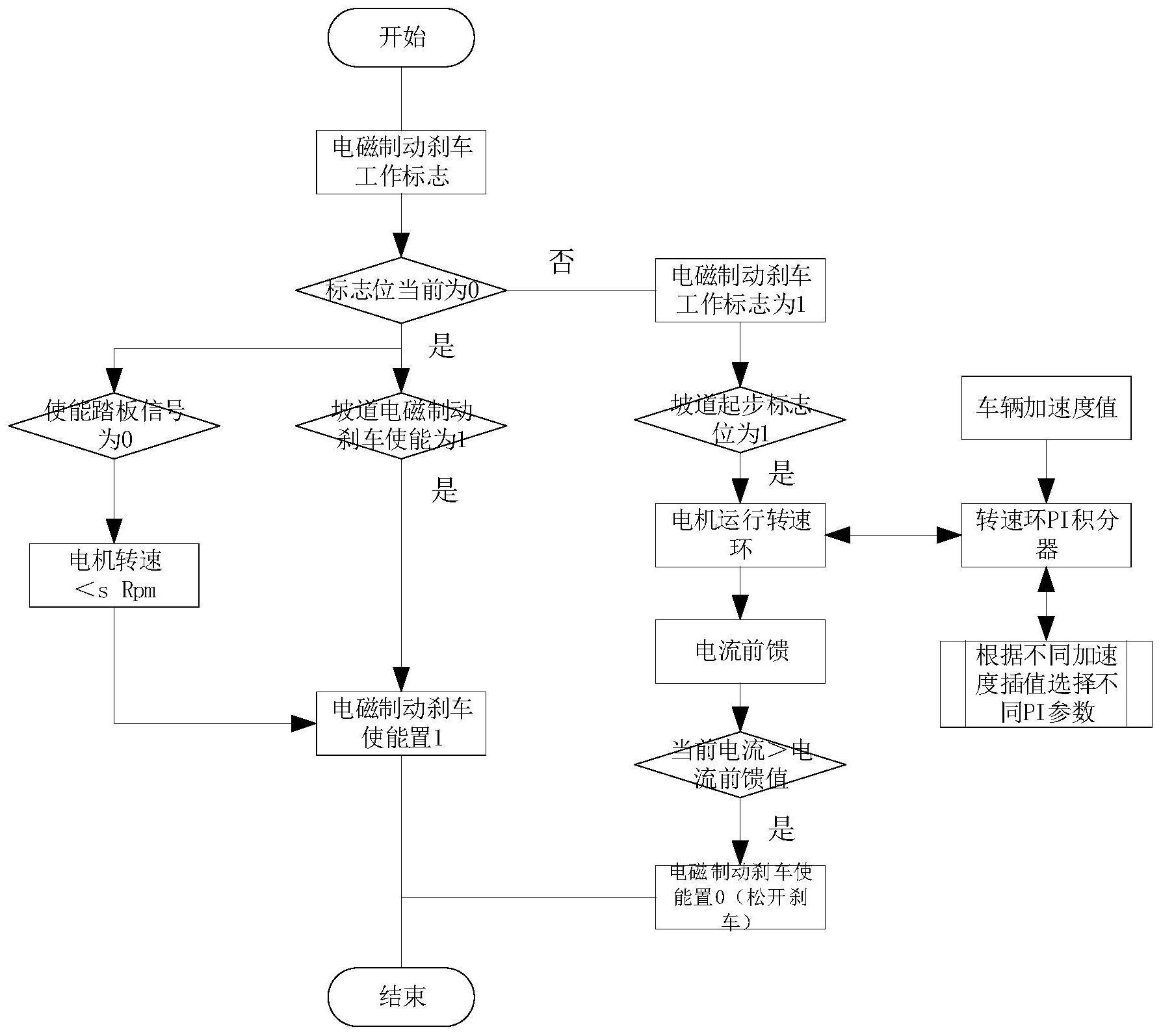
4、响应于车辆踏板动作指令,且确定车辆踏板动作指令为车辆起步指令时,将所述匀速行驶状态下的驱动电流作为前馈值对电机进行比例积分调速,直到电机的实际电流值大于所述前馈值时,输出坡道电磁刹车的释放指令,以控制坡道电磁刹车执行相应的动作。
5、可选的,所述比例积分的调节参数为pi参数;所述pi参数通过以下步骤进行确定:
6、在接收到行车踏板恢复完成指令且确定电机控制器的使能状态满足第一预设条件时,获取当前车速并根据当前车速计算当前车辆的加速度;根据所述车辆的加速度确定pi参数。
7、可选的,所述获取车辆在爬坡模式下,且车辆处于匀速行驶状态下的驱动电流,包括:
8、实时获取电机转速和电机的电流值;
9、根据所述电机转速和电机的电流值确定车辆的爬坡工况;在确定车辆的爬坡工况为爬坡模式时:
10、若根据当前的电机转速和电机的电流值确定当前爬坡模式下车辆处于匀速行驶状态,计算匀速行驶状态下的驱动电流。
11、可选的,所述方法还包括:
12、在确定车辆的爬坡工况为爬坡模式时,获取当前的车辆行驶方向控制指令;
13、若确定电机控制器的使能状态满足第一预设条件,且当前车辆的加速度大于设定值以及当前的车辆行驶方向控制指令与当前电机转速不一致时,输出坡道电磁刹车的控制指令,以控制坡道电磁刹车的执行动作。
14、可选的,所述根据当前的电机转速和电机的电流值确定车辆的爬坡工况,包括:
15、当电机转速和电机的电流值满足第二预设条件时,进行第一状态保持,当电机转速和电机的电流值不满足第二预设条件时,将所述第一状态复位;所述第二预设条件为电机的电流值>标定值y且电机转速<标定值x;
16、获取所述第一状态在复位前的持续时间;
17、确定所述第一状态在复位前的持续时间大于第一设定值时,确定车辆的爬坡工况为爬坡模式。
18、可选的,所述根据当前的电机转速和电机的电流值确定车辆的爬坡工况,还包括:
19、基于电机转速和电机的电流值,控制第二状态的变换,所述变换的方式包括保持和复位;
20、获取所述第二状态在复位前的持续时间;
21、确定当前车辆的爬坡工况为爬坡模式且所述第二状态在复位前的持续时间大于第二设定值时,确定车辆的爬坡工况为非爬坡模式。
22、可选的,所述基于电机转速和电机的电流值,控制第二状态的变换,包括:
23、当电机转速和电机的电流值满足第三预设条件时,进行第二状态保持,当电机转速和电机的电流值不满足第三预设条件时,将所述第二状态复位;所述第三预设条件为电机的电流值<标定值y或者当电机转速>标定值x。
24、可选的,若根据当前的电机转速和电机的电流值确定当前爬坡模式下车辆处于匀速行驶状态,计算匀速行驶状态下的驱动电流,包括:
25、计算电机的转速差,确定电机的转速差小于设定值时,确定当前爬坡模式下车辆处于匀速行驶状态,将该匀速行驶状态下的电机的电流值的平均值作为匀速行驶状态下的驱动电流。
26、可选的,所述确定电机控制器的使能状态满足第一预设条件,包括:
27、实时获取电机控制器的使能状态;
28、在接收到行车踏板恢复完成指令的条件下,根据当前时刻电机控制器的使能状态和前一时刻电机控制器的使能状态确定电机控制器的使能状态由输出位转至停止位时,确定电机控制器的使能状态满足第一预设条件。
29、可选的,所述确定车辆踏板动作指令为车辆起步指令,包括:
30、获取车辆起步判断信号;
31、确定车辆起步判断信号均满足对应条件时,确定车辆踏板动作指令为车辆起步指令。
32、可选的,所述车辆起步判断信号包括:坡道电磁刹车的状态、电机控制器的使能状态、电机转速和车辆故障信号;
33、在确定坡道电磁刹车的状态为刹车状态、电机控制器的使能状态为输出位、电机转速不等于零且车辆故障信号为正常时,确定车辆起步判断信号均满足对应条件。
34、本发明还提供一种电驱动车辆的控制系统,所述控制系统包括:
35、坡道起步标志判断模块,用于响应于车辆踏板动作指令,确定车辆踏板动作指令是否为车辆起步指令;
36、坡道起步控制模块,用于获取车辆在爬坡模式下,且车辆处于匀速行驶状态下的驱动电流;以及在坡道起步标志判断模块确定车辆踏板动作指令为车辆起步指令的条件下,将车辆匀速行驶状态下的驱动电流作为前馈值对电机进行比例积分调速,直到电机的实际电流值大于所述前馈值时,输出坡道电磁刹车的释放指令,以控制坡道电磁刹车执行相应的动作。
37、可选的,所述比例积分的调节参数为pi参数;所述控制系统还包括:
38、坡道电磁制动刹车使能判断模块,用于在接收到行车踏板恢复完成指令且确定电机控制器的使能状态满足第一预设条件时,获取当前车速并根据当前车速计算当前车辆的加速度;根据所述车辆的加速度确定pi参数。
39、可选的,所述控制系统还包括:
40、车辆爬坡工况判断模块,用于实时获取电机转速和电机的电流值,根据所述电机转速和电机的电流值确定车辆的爬坡工况;
41、电流捕捉模块,用于在车辆爬坡工况判断模块确定车辆的爬坡工况为爬坡模式时,根据当前的电机转速和电机的电流值确定当前爬坡模式下车辆是否处于匀速行驶状态,在确定车辆处于匀速行驶状态时计算匀速行驶状态下的驱动电流。
42、可选的,所述坡道电磁制动刹车使能判断模块还用于:
43、在确定车辆的爬坡工况为爬坡模式时,获取当前的车辆行驶方向控制指令;
44、若确定电机控制器的使能状态满足第一预设条件,且当前车辆的加速度大于设定值以及当前的车辆行驶方向控制指令与当前电机转速不一致时,输出坡道电磁刹车的控制指令,以控制坡道电磁刹车的执行动作。
45、可选的,在电驱动车辆的控制系统中,所述根据当前的电机转速和电机的电流值确定车辆的爬坡工况,包括:
46、当电机转速和电机的电流值满足第二预设条件时,进行第一状态保持,当电机转速和电机的电流值不满足第二预设条件时,将所述第一状态复位;所述第二预设条件为电机的电流值>标定值y且电机转速<标定值x;
47、获取所述第一状态在复位前的持续时间;
48、确定所述第一状态在复位前的持续时间大于第一设定值时,确定车辆的爬坡工况为爬坡模式。
49、可选的,在电驱动车辆的控制系统中,所述根据当前的电机转速和电机的电流值确定车辆的爬坡工况,还包括:
50、基于电机转速和电机的电流值,控制第二状态的变换,所述变换的方式包括保持和复位;
51、获取所述第二状态在复位前的持续时间;
52、确定当前车辆的爬坡工况为爬坡模式且所述第二状态在复位前的持续时间大于第二设定值时,确定车辆的爬坡工况为非爬坡模式。
53、可选的,所述基于电机转速和电机的电流值,控制第二状态的变换,包括:
54、当电机转速和电机的电流值满足第三预设条件时,进行第二状态保持,当电机转速和电机的电流值不满足第三预设条件时,将所述第二状态复位;所述第三预设条件为电机的电流值<标定值y或者当电机转速>标定值x。
55、可选的,在电驱动车辆的控制系统中,若根据当前的电机转速和电机的电流值确定当前爬坡模式下车辆处于匀速行驶状态,计算匀速行驶状态下的驱动电流,包括:
56、计算电机的转速差,确定电机的转速差小于设定值时,确定当前爬坡模式下车辆处于匀速行驶状态,将该匀速行驶状态下的电机的电流值的平均值作为匀速行驶状态下的驱动电流。
57、可选的,在电驱动车辆的控制系统中,所述确定电机控制器的使能状态满足第一预设条件,包括:
58、实时获取电机控制器的使能状态;
59、在接收到行车踏板恢复完成指令的条件下,根据当前时刻电机控制器的使能状态和前一时刻电机控制器的使能状态确定电机控制器的使能状态由输出位转至停止位时,确定电机控制器的使能状态满足第一预设条件。
60、可选的,在电驱动车辆的控制系统中,所述确定车辆踏板动作指令为车辆起步指令,包括:
61、获取车辆起步判断信号;
62、确定车辆起步判断信号均满足对应条件时,确定车辆踏板动作指令为车辆起步指令。
63、可选的,在电驱动车辆的控制系统中,所述车辆起步判断信号包括:坡道电磁刹车的状态、电机控制器的使能状态、电机转速和车辆故障信号;
64、在确定坡道电磁刹车的状态为刹车状态、电机控制器的使能状态为输出位、电机转速不等于零且车辆故障信号为正常时,确定车辆起步判断信号均满足对应条件。
65、另一方面,本发明提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行上述的电驱动车辆的控制方法。通过上述技术方案,当判断车辆需要坡道起步时,也即是确定车辆踏板动作指令为车辆起步指令,将匀速行驶状态下的驱动电流作为前馈值对电机进行比例积分调速,直到电机的实际电流值大于所述前馈值时,输出坡道电磁刹车的释放指令,以控制坡道电磁刹车的执行动作。通过本技术的控制逻辑,将车辆需要坡道起步的控制参数进行了坡度适应,提高了车辆坡道起步的性能,可实现不同坡道的快速平稳起步,减小后溜,提高安全性。
66、本发明实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!